1.本发明涉及医疗器械技术领域,特别涉及一种手术器械保护装置、手术器械、安装部及手术器械组件。
背景技术:
2.现有腹腔镜手术机器人,搭配使用一次性的附件和可重复使用的手术器械,一般重复使用的手术器械有使用寿命限制。现有技术中,手术机器人是通过芯片信息记录使用次数,在手术器械使用达到使用限制次数时,手术器械是可以再次安装在手术机器人上的,无法通过外观识别手术器械是否已经到达限制使用寿命,当前手术器械会存在再次使用的风险。只能通过手术器械再次安装,通过芯片信息才能够识别,增加不必要的安装时间,提升手术风险;且手术器械还可能存在再次利用的风险。
技术实现要素:
3.本发明的目的在于提供一种手术器械保护装置、手术器械、安装部及手术器械组件,以解决现有手术器械到达限制使用寿命后存在再次利用风险的问题。
4.为解决上述技术问题,本发明的第一个方面提供一种手术器械保护装置,其包括:强制保护单元;
5.所述强制保护单元具有第一状态和第二状态,所述强制保护单元处于所述第一状态时,允许手术器械安装于安装部上;所述强制保护单元处于所述第二状态时,禁止所述手术器械再次安装于安装部上;
6.在所述手术器械的使用寿命到达限值时,所述强制保护单元在动力单元的驱动下由所述第一状态转换至所述第二状态。
7.可选的,在所述手术器械保护装置中,所述强制保护单元包括第一抵触部件,所述第一抵触部件通过机械运动改变自身位置和/或姿态,使所述强制保护单元由所述第一状态转换至所述第二状态;所述强制保护单元处于所述第二状态时,所述第一抵触部件与安装部上处于初始状态的第二抵触部件相抵触,从而禁止所述手术器械再次安装于安装部上。
8.可选的,在所述手术器械保护装置中,所述机械运动包括围绕所述第一抵触部件自身轴线的转动,和/或,沿所述第一抵触部件自身轴线的移动。
9.可选的,在所述手术器械保护装置中,所述强制保护单元于所述第一状态转换至所述第二状态后,所述第一抵触部件的自身位置和/或姿态被锁定,以使所述强制保护单元被锁定于所述第二状态。
10.可选的,在所述手术器械保护装置中,所述第一抵触部件用于在所述安装部上的第二抵触部件的驱动下,改变自身位置和/或姿态。
11.可选的,在所述手术器械保护装置中,所述第一抵触部件围绕自身轴线可转动;
12.所述强制保护单元于所述第一状态时,所述第一抵触部件与安装部上的第二抵触
部件相适配;
13.所述第一抵触部件在所述第二抵触部件的驱动下围绕自身轴线转动,使所述强制保护单元由所述第一状态转换至所述第二状态。
14.可选的,在所述手术器械保护装置中,所述强制保护单元包括第一锁定组件,所述第一锁定组件包括限位件以及围绕所述第一抵触部件的轴线可转动的限位转盘;所述限位转盘与所述第一抵触部件连接;所述限位件通过限制所述限位转盘转动,使所述强制保护单元被锁定于所述第二状态。
15.可选的,在所述手术器械保护装置中,所述限位转盘具有沿径向和/或轴向开设的限位槽,所述限位件沿所述限位转盘的径向和/或轴向可移动;
16.所述强制保护单元于处于所述第二状态时,所述限位槽与所述限位件对准,所述限位件卡合入所述限位槽中,以限制所述限位转盘转动。
17.可选的,在所述手术器械保护装置中,所述限位转盘包括棘轮,所述限位件包括棘爪;
18.所述强制保护单元于所述第一状态转换至所述第二状态的过程中,所述棘爪限制所述棘轮单向转动。
19.可选的,在所述手术器械保护装置中,所述限位转盘还包括限位面,所述限位件还包括抵靠结构;
20.所述强制保护单元于所述第一状态转换至所述第二状态后,所述限位面与所述抵靠结构相抵靠,以限制所述限位转盘继续转动。
21.可选的,在所述手术器械保护装置中,所述强制保护单元还包括阻尼组件,所述阻尼组件向所述限位转盘的转动施加阻力,所述限位转盘的转动力矩不足以克服所述阻尼组件的阻力时,所述阻尼组件限制所述限位转盘转动。
22.可选的,在所述手术器械保护装置中,所述阻尼组件包括第一弹性件以及沿所述限位转盘之径向可移动的阻尼滑块,所述第一弹性件向所述阻尼滑块施加弹性力,以使所述阻尼滑块抵靠于所述限位转盘上。
23.可选的,在所述手术器械保护装置中,所述限位转盘具有沿径向开设的凹口,至少所述强制保护单元处于所述第一状态时,所述阻尼滑块抵靠于所述凹口处。
24.可选的,所述凹口具有与所述阻尼滑块相适配的引导壁,所述引导壁用于引导所述阻尼滑块滑入所述凹口。
25.可选的,在所述手术器械保护装置中,所述第一抵触部件沿自身轴向可移动;
26.所述强制保护单元于所述第一状态时,所述第一抵触部件与安装部上的第二抵触部件相适配;
27.所述第一抵触部件在所述第二抵触部件的驱动下沿自身轴向移动,使所述强制保护单元由所述第一状态转换至所述第二状态。
28.可选的,在所述手术器械保护装置中,所述强制保护单元包括第二锁定组件,所述第二锁定组件包括第一滑块和第二滑块,所述第一滑块沿所述第一抵触部件的轴向可移动,并与所述第一抵触部件连接;所述第二滑块沿所述第一抵触部件的径向可移动;所述第二滑块通过限制所述第一滑块的轴向移动,使所述强制保护单元被锁定于所述第二状态。
29.可选的,在所述手术器械保护装置中,所述强制保护单元自所述第一状态转换至
所述第二状态时,所述第一滑块沿轴向移至第一位置,所述第二滑块沿径向移动并与所述第一滑块抵靠,以限制所述第一滑块自所述第一位置向远离所述第二抵触部件的方向移动。
30.可选的,在所述手术器械保护装置中,所述强制保护单元包括推力组件,所述推力组件向所述第一抵触部件施加朝向所述第二抵触部件的推力。
31.可选的,在所述手术器械保护装置中,所述推力组件包括第一滑块和第二滑块;所述第一滑块沿所述第一抵触部件的轴向可移动,并与所述第一抵触部件连接;所述第二滑块沿所述第一抵触部件的径向可移动;所述第一滑块具有第一斜面,所述第二滑块具有第二斜面,所述第一斜面与所述第二斜面的倾斜方向相同;所述第一滑块的轴向移动与所述第二滑块的径向移动,通过所述第二斜面与所述第一斜面的抵靠实现转换。
32.可选的,在所述手术器械保护装置中,所述推力组件还包括第二弹性件,所述第二弹性件向所述第二滑块施加弹性力,所述弹性力指向所述第一抵触部件的轴线。
33.可选的,在所述手术器械保护装置中,所述强制保护单元还包括触发组件,所述第一滑块在所述第二抵触部件的推动下,沿远离所述第二抵触部件的方向移动至触发位置前,所述触发组件限制所述第一滑块在朝向所述第二抵触部件的方向上不超出第二位置;以使所述第一抵触部件与所述第二抵触部件相适配;
34.在所述第一滑块沿远离所述第二抵触部件的方向移动至触发位置后,所述触发组件解除对所述第一滑块的限制,所述第一滑块在所述推力组件的推力作用下,朝向所述第二抵触部件的方向移动至第一位置。
35.可选的,在所述手术器械保护装置中,所述触发组件包括沿自身轴向开设的引导孔,所述第一抵触部件的横截面形状与所述引导孔的横截面形状相适配;所述第一抵触部件的至少部分可活动地穿设于所述引导孔中。
36.可选的,在所述手术器械保护装置中,所述触发组件包括导向槽和导向块,所述导向块沿所述导向槽的延伸方向可移动地设置于所述导向槽中;所述导向槽和导向块中的一者设置于所述第一抵触部件上,另一者设置于所述引导孔的侧壁上;
37.其中,所述导向槽包括沿所述第一抵触部件的轴向设置的第一子导向槽和与所述第一子导向槽连通的第二子导向槽,所述第二子导向槽相对于所述第一导向槽倾斜设置;所述第二子导向槽与所述第一子导向槽连通的一端远离所述第二抵触部件,另一端靠近所述第二抵触部件并且位于所述第一子导向槽的两个端部之间;
38.在所述第一滑块沿远离所述第二抵触部件的方向移动至触发位置前,所述导向块位于所述第二子导向槽中,在所述第一滑块沿远离所述第二抵触部件的方向移动至触发位置后,所述导向块位于所述第一子导向槽中。
39.可选的,在所述手术器械保护装置中,所述第一抵触部件围绕自身轴线可转动,所述第一抵触部件的轴线与所述引导孔的轴线重合。
40.可选的,在所述手术器械保护装置中,所述手术器械保护装置还包括计数单元,所述计数单元用于获取所述手术器械的使用寿命,并在所述手术器械的使用寿命到达限值时,触发动力单元驱动所述强制保护单元由所述第一状态转换至所述第二状态。
41.为解决上述技术问题,本发明的第二个方面提供一种手术器械,其包括第一基板和如上所述的手术器械保护装置;所述第一基板用于在所述手术器械保护装置的强制保护
单元处于所述第一状态时,与安装部抵靠连接而使所述手术器械安装于所述安装部上。
42.为解决上述技术问题,本发明的第三个方面提供一种安装部,其用于与如上所述的手术器械装配;所述安装部包括第二基板;所述第二基板用于在所述手术器械保护装置的强制保护单元处于所述第一状态时,与所述第一基板抵靠连接。
43.可选的,所述安装部还包括第二抵触部件,在所述第二抵触部件处于初始状态时,与处于所述第一状态的强制保护单元的第一抵触部件相适配;并与处于所述第二状态的强制保护单元的第一抵触部件相抵触。
44.可选的,在所述安装部中,所述第二抵触部件围绕自身的轴线可转动,或者,所述第二抵触部件沿自身轴向可移动。
45.可选的,在所述安装部中,所述第二抵触部件在动力装置的驱动下,带动所述第一抵触部件机械运动。
46.为解决上述技术问题,本发明的第四个方面提供一种手术器械组件,其包括动力装置、如上所述的手术器械和如上所述的安装部;所述动力装置通过所述安装部与所述手术器械连接;所述手术器械保护装置的动力单元设置于所述动力装置中。
47.综上所述,本发明提供的手术器械保护装置包括:强制保护单元和计数单元;所述强制保护单元具有第一状态和第二状态,所述强制保护单元处于所述第一状态时,允许手术器械安装于安装部上;所述强制保护单元处于所述第二状态时,禁止所述手术器械再次安装于安装部上;所述计数单元用于获取所述手术器械的使用寿命,并在所述手术器械的使用寿命到达限值时,向外部的动力单元发送驱动信号;进而所述强制保护单元在所述动力单元的驱动下由所述第一状态转换至所述第二状态。
48.如此配置,在手术器械的使用寿命到达限值时,强制保护单元由第一状态转换至第二状态,从而禁止该手术器械再次安装于安装部上,由此起到强制保护作用,使到达限制使用寿命的手术器械无法再次被安装于安装部,杜绝了再次利用风险。此外,由于强制保护单元由第一状态转换至第二状态,能够通过外观识别手术器械无法再次使用,提高操作者对到达限制使用寿命的手术器械的辨识率。
附图说明
49.本领域的普通技术人员将会理解,提供的附图用于更好地理解本发明,而不对本发明的范围构成任何限定。其中:
50.图1是一种手术机器人系统的应用场景的示意图;
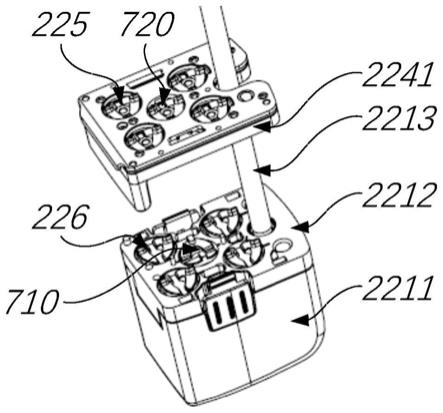
51.图2a是本发明实施例的手术器械组件的示意图;
52.图2b是本发明实施例的手术器械组件的分解示意图;
53.图3是本发明实施例一的手术器械与安装部的安装示意图;
54.图4a是本发明实施例一的强制保护单元处于第一状态的示意图;
55.图4b是本发明实施例一的强制保护单元处于第二状态的示意图;
56.图5a是本发明实施例一的强制保护单元处于第一状态时,第一抵触部件和第二抵触部件的示意图;
57.图5b是本发明实施例一的强制保护单元处于第二状态时,第一抵触部件和第二抵触部件的示意图;
58.图6是本发明实施例一的强制保护单元的分解示意图;
59.图7是本发明实施例一的第一锁定组件的第一个优选示例的分解示意图;
60.图8是本发明实施例一的第一锁定组件的第一个优选示例的示意图;其中强制保护单元处于第一状态;
61.图9是本发明实施例一的第一锁定组件的第一个优选示例的示意图;其中强制保护单元处于第二状态;
62.图10是本发明实施例一的第一锁定组件的第二个优选示例的示意图;
63.图11是本发明实施例一的第一锁定组件的第三个优选示例的示意图;
64.图12是本发明实施例一的第一锁定组件的第四个优选示例的示意图;
65.图13是本发明实施例一的第一锁定组件的第五个优选示例的示意图;
66.图14是本发明实施例二的手术器械与安装部的安装示意图;
67.图15a是本发明实施例二的强制保护单元处于第一状态的示意图;
68.图15b是本发明实施例二的强制保护单元处于第二状态的示意图;
69.图16a是本发明实施例二另一示例的强制保护单元处于第一状态的示意图;
70.图16b是本发明实施例二另一示例的强制保护单元处于第二状态的示意图;
71.图17a是本发明实施例二的安装部的示意图,其中第二抵触部件处于初始状态;
72.图17b是本发明实施例二的安装部的示意图,其中第二抵触部件伸出;
73.图18是本发明实施例二的手术器械与安装部的轴向剖面图;
74.图19a是本发明实施例二的第二锁定组件的轴向剖面图,其中强制保护单元处于第一状态;
75.图19b是本发明实施例二的第二锁定组件的轴向剖面图,其中第一抵触部件处于触发位置;
76.图19c是本发明实施例二的第二锁定组件的轴向剖面图,其中强制保护单元处于第二状态;
77.图20是本发明实施例二的触发组件的分解示意图;
78.图21a是本发明实施例二的触发组件于强制保护单元处于第一状态时的示意图;
79.图21b是本发明实施例二的触发组件于第一抵触部件处于触发位置的示意图;
80.图21c是本发明实施例二的触发组件于强制保护单元处于第二状态时的示意图;
81.图22a是本发明实施例二的第一抵触部件与第一滑块的示意图;
82.图22b是本发明实施例二的第一抵触部件与第一滑块的轴向剖面图。
83.附图中:
84.100-主端装置;101-主操作手;102-成像设备;103-脚踏手术控制设备;200-从端装置;201-底座;210-器械臂;221-手术器械;2211-壳体;2212-第一基板;2213-器械杆;222-内窥镜;223-动力装置;224-安装部;2241-第二基板;225-动力传输件;226-传动接头;300-图像台车;302-显示设备;400-支撑装置;410-患者;500-呼吸机和麻醉机;600-器械台;710-第一抵触部件;711-第一凸齿;712-第一凹槽;720-第二抵触部件;721-第二凹槽;722-第二凸齿;810-信号传输件;910-第一锁定组件;911-限位件;912-限位转盘;913-限位槽;914-凹口;915-限位面;916-抵靠结构;920-阻尼组件;921-第一弹性件;922-阻尼滑块;930-第二锁定组件;931-第一滑块;9311-第一斜面;932-第二滑块;9321-第二斜面;933-第
二弹性件;940-引导孔;941-导向槽;942-导向块;941a-第一子导向槽;941b-第二子导向槽。
具体实施方式
86.为使本发明的目的、优点和特征更加清楚,以下结合附图和具体实施例对本发明作进一步详细说明。需说明的是,附图均采用非常简化的形式且未按比例绘制,仅用以方便、明晰地辅助说明本发明实施例的目的。此外,附图所展示的结构往往是实际结构的一部分。特别的,各附图需要展示的侧重点不同,有时会采用不同的比例。
87.如在本发明中所使用的,单数形式“一”、“一个”以及“该”包括复数对象,术语“或”通常是以包括“和/或”的含义而进行使用的,术语“若干”通常是以包括“至少一个”的含义而进行使用的,术语“至少两个”通常是以包括“两个或两个以上”的含义而进行使用的,此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括一个或者至少两个该特征,术语“近端”通常是靠近操作者的一端,术语“远端”通常是靠近患者即靠近病灶的一端,“一端”与“另一端”以及“近端”与“远端”通常是指相对应的两部分,其不仅包括端点,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。此外,如在本发明中所使用的,一元件设置于另一元件,通常仅表示两元件之间存在连接、耦合、配合或传动关系,且两元件之间可以是直接的或通过中间元件间接的连接、耦合、配合或传动,而不能理解为指示或暗示两元件之间的空间位置关系,即一元件可以在另一元件的内部、外部、上方、下方或一侧等任意方位,除非内容另外明确指出外。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
88.本发明的目的在于提供一种手术器械保护装置、手术器械、安装部及手术器械组件,以解决现有手术器械到达限制使用寿命后存在再次利用风险的问题。
89.以下参考附图进行描述。
90.图1示出了一个手术机器人系统的应用场景,所述手术机器人系统包括主从式遥操作的手术机器人,即所述手术机器人系统包括主端装置100(即医生端控制装置)、从端装置200(即患者端控制装置)、主控制器以及用于支撑手术对象进行手术的支撑装置400(例如,手术床)。需要说明的,在一些实施例中,支撑装置400也可替换为其它的手术操作平台,本发明对此不限。
91.所述主端装置100为遥操作手术机器人的操作端,并包含安装其上的主操作手101。所述主操作手101用于接收操作者的手部运动信息,以作为整个系统的运动控制信号输入。可选的,所述主控制器亦设置在所述主端装置100上。优选的,主端装置100还包括成像设备102,所述成像设备102可为操作者提供立体图像,为操作者进行手术操作提供术野图像。所述术野图像包括手术器械类型、数量、在腹中的位姿,病患器官组织以及周围器官组织血管的形态、布置等。可选的,主端装置100还包括脚踏手术控制设备103,操作者还可通过脚踏手术控制设备103,完成电切、电凝等相关操作指令的输入。
92.从端装置200为遥操作手术机器人的具体执行平台,并包括底座201及安装于其上
的手术执行组件。所述手术执行组件包括器械臂210和器械,所述器械挂载或连接于器械臂210的末端。进一步的,器械包括用于具体执行手术操作的手术器械221(如高频电刀等)以及用于辅助观察的内窥镜222等。
93.在一个实施例中,所述器械臂210包括调整臂和工作臂。所述工具臂为机械不动点机构,用于驱动器械围绕机械不动点运动,以实现对支撑装置400上的患者410进行微创伤手术治疗或拍摄操作。所述调整臂用于调整机械不动点在工作空间的位姿。在另外一个实施例中,所述器械臂210为一个至少具有六个自由度的空间构型的机构,用于在程序控制下驱动手术器械221围绕一主动不动点运动。所述手术器械221用于执行具体的手术操作,如夹、切、剪等操作。需要说明的,由于实际中手术器械221和内窥镜222有一定的体积,上述的“不动点”应理解为一个不动区域。当然本领域技术人员可根据现有技术对“不动点”进行理解。
94.主控制器分别与主端装置100、从端装置200通信连接,用于根据主操作手101的运动控制手术执行组件的运动,具体而言,所述主控制器包括主从映射模块,所述主从映射模块用于获取所述主操作手101的末端位姿,以及预定的主从映射关系,获得手术执行组件的期望末端位姿,进而控制器械臂210驱动器械运动到期望的末端位姿。进一步,所述主从映射模块还用于接收器械功能操作指令(如电切、电凝等相关操作指令),控制手术器械221的能量驱动器,以释放能量实现电切、电凝等手术操作。一些实施例中,主控制器还接受手术执行组件所受到的作用力信息(例如人体组织器官对手术器械的作用力信息),并将手术执行组件所受到的作用力信息反馈给主操作手101,以使操作者能够更加直观地感受手术操作的反馈力。
95.进一步,所述医疗机器人系统还包括图像台车300。所述图像台车300包括:与所述内窥镜222通信连接图像处理单元(未图示)。所述内窥镜222用于获取腔内(指患者的体腔内)的术野图像。所述图像处理单元用于对所述内窥镜222所获取的术野图像进行图像化处理,并传输至所述成像设备102,以便于操作者观察到术野图像。可选的,所述图像台车300还包括显示设备302。所述显示设备302与所述图像处理单元通信连接,用于为辅助操作者(例如护士)实时提供显示术野图像或其它的辅助显示信息。
96.可选的,在一些手术的应用场景中,手术机器人系统还包括呼吸机和麻醉机500以及器械台600等辅助部件,以用于供手术中使用。本领域技术人员可根据现有技术对这些辅助部件进行选择和配置,这里不再展开描述。
97.需要说明的,上述示范例所公开的手术机器人系统仅为一个应用场景的示范而非对手术机器人系统应用场景的限定,手术机器人系统也不限于为主从式遥操作的手术机器人,也可以是单端式的手术机器人系统,操作者直接操作手术机器人执行手术,本发明对此不限。
98.请参考图2a和图2b,并结合图4a和图4b,图2a和图2b示出了手术器械组件的一个示范例,在手术机器人系统中,手术器械221自身可不设置动力部件,而是安装在工作臂上,利用设置在工作臂上的动力装置223进行驱动。手术器械221如可包括:壳体2211、第一基板2212、传动机构、器械杆2213以及操作机构(未图示,如电剪)等。
99.在一些实施例中,手术器械221可沿器械杆2213的轴向进行伸缩移动、可绕器械杆2213的周向进行自转运动;操作机构可进行俯仰运动、偏摆运动和开合运动,以便实现手术
操作中的各种应用。工作臂通过动力装置223及传动机构,即可实现驱动手术器械221的操作机构和/或器械杆2213执行运动。
100.一般的,由于手术器械221可经消毒而成为无菌部件,但工作臂及动力装置223常无法进行消毒,因此手术器械221可通过安装部224(如安装板)与动力装置223形成无菌隔离,安装部224还可以与无菌膜连接,使得手术器械221与动力装置223相隔离。可以理解的,安装部224上同样设置有一系列的动力传输件225,以将动力装置223的动力输出耦合传输至手术器械221上。可选的,第一基板2212,安装部224包括第二基板2241,在手术器械221安装于安装部224上时,第二基板2241与第一基板2212抵靠连接。
101.手术器械221的传动机构包括传动接头226和转换机构,传动接头226可转动地设置于第一基板2212上,用于与动力装置223耦合连接,以获得来自动力装置223的动力。转换机构可容置于壳体2211和第一基板2212形成的容置腔中,其能够将传动接头226的转动转换为操作机构和/或器械杆2213的运动,例如可包括传动丝、传动轮或齿轮等,本领域技术人员可根据现有技术对转换机构进行理解,这里不作展开说明。
102.在一个可替代的示范例中,安装部224上具有4个可转动的动力传输件225,相匹配的,传动机构包括4个传动接头226,在手术器械221安装于安装部224上后,动力传输件225与传动接头226相匹配卡合,两者可以传递扭矩。进一步的,请结合参考图2a和图2b,在安装部224与动力装置223装配连接后,动力装置223能够驱动动力传输件225转动,从而带动手术器械221的传动接头226转动,进而通过转换机构,驱动操作机构和/或器械杆2213运动。需要说明的,安装部224上动力传输件225的数量、以及传动机构中传动接头226的数量不限于为4个。
103.基于此,发明人研究发现,可以通过对在手术器械221上设置手术器械保护装置,使得手术器械221的使用寿命到达限值时,无法再次安装于安装部224上。本发明实施例提供的手术器械保护装置包括强制保护单元;所述强制保护单元具有第一状态和第二状态,所述强制保护单元处于所述第一状态时,允许手术器械221安装于安装部224上;所述强制保护单元处于所述第二状态时,禁止所述手术器械221再次安装于安装部224上;其中,在所述手术器械221的使用寿命到达限值时,所述强制保护单元在外部的动力单元的驱动下由所述第一状态转换至所述第二状态。需要说明的,这里手术器械221的使用寿命,不限于为手术器械221的使用次数,也可以是手术器械221的使用时长等,限值也可根据不同的手术器械221和应用场景进行不同的设置,本领域技术人员可根据实际进行配置。
104.如此配置,在手术器械221的使用寿命到达限值时,强制保护单元由第一状态转换至第二状态,从而禁止该手术器械221再次安装于安装部224上,由此起到强制保护作用,使到达限制使用寿命的手术器械221无法再次被安装于安装部224,杜绝了再次利用风险。此外,由于强制保护单元由第一状态转换至第二状态,能够通过外观识别手术器械221无法再次使用,提高操作者对使用寿命到达限值的手术器械221的辨识率。
105.请参考图3和图14,所述强制保护单元包括第一抵触部件710,所述第一抵触部件710通过机械运动改变自身位置和/或姿态,使所述强制保护单元由所述第一状态转换至所述第二状态;所述强制保护单元处于所述第二状态时,所述第一抵触部件710与安装部224上处于初始状态的第二抵触部件720相抵触,从而禁止所述手术器械221再次安装于安装部224上。需要说明的,这里的机械运动包括围绕所述第一抵触部件710自身轴线的转动,和/
或,沿所述第一抵触部件710自身轴线的移动。特别的,这里第一抵触部件710的位置或姿态是指相对于手术器械221上固定参考基准(如第一基板2212)的相对位置或相对姿态,位置改变如可为移动,姿态改变如可为转动等。
106.优选的,所述手术器械保护装置还包括计数单元,所述计数单元用于获取所述手术器械221的使用寿命,并在所述手术器械221的使用寿命到达限值时,触发外部的动力单元驱动所述强制保护单元由所述第一状态转换至所述第二状态。本实施例对计数单元的具体结构和原理不作限定,本领域技术人员可根据实际进行配置。请参考图4a和图4b,在一个示范例中,计数单元包括设置于手术器械221中的芯片,以及设置在第一基板2212上的信号传输件810(如可为铜柱),计数单元能够通过信号传输件810将触发信号传输至动力单元(如电机),从而触发动力单元执行动作。在一些实施例中,动力单元设置于所述动力装置223中,将电机集中设置,便于实施和控制;当然在其它的一些实施例中,动力单元也可以被内置于手术器械221中,此时计数单元可以直接与动力单元形成通信连接,且第一抵触部件710可以被直接驱动而使强制保护单元由第一状态转换至第二状态。
107.可选的,所述第一抵触部件710用于在所述安装部224上的第二抵触部件720的驱动下,改变自身位置和/或姿态。动力单元设置于所述动力装置223中时,可通过第二抵触部件720对第一抵触部件710进行驱动,便于简化手术器械221的内部结构。
108.进一步的,所述强制保护单元于所述第一状态转换至所述第二状态后,所述第一抵触部件710的自身位置和/或姿态被锁定,以使所述强制保护单元被锁定于所述第二状态。由此保证了一旦第一抵触部件710通过机械运动改变自身位置和/或姿态,使强制保护单元由第一状态转换至第二状态后,第一抵触部件710的位置和/或姿态被锁定而不再发生变化,使强制保护单元永久地处于第二状态,确保了强制保护单元无法回退至第一状态,从而确保了使用寿命到达限值的手术器械221无法被再次安装利用。
109.可选的,在所述安装部224中,所述第二抵触部件720围绕自身的轴线可转动,或者,所述第二抵触部件720沿自身轴向可移动。进一步的,所述第二抵触部件720在动力装置223的驱动下,带动所述第一抵触部件710机械运动。
110.下面通过若干实施例,对本发明提供的手术器械保护装置、手术器械、安装部及手术器械组件进行具体说明。
111.【实施例一】
112.请参考图3至图13,其中,图3是本发明实施例一的手术器械与安装部的安装示意图;图4a是本发明实施例一的强制保护单元处于第一状态的示意图;
113.图4b是本发明实施例一的强制保护单元处于第二状态的示意图;图5a是本发明实施例一的强制保护单元处于第一状态时,第一抵触部件和第二抵触部件的示意图;图5b是本发明实施例一的强制保护单元处于第二状态时,第一抵触部件和第二抵触部件的示意图;图6是本发明实施例一的强制保护单元的分解示意图;图7是本发明实施例一的第一锁定组件的第一个优选示例的分解示意图;
114.图8是本发明实施例一的第一锁定组件的第一个优选示例的示意图;其中强制保护单元处于第一状态;图9是本发明实施例一的第一锁定组件的第一个优选示例的示意图;其中强制保护单元处于第二状态;图10是本发明实施例一的第一锁定组件的第二个优选示例的示意图;图11是本发明实施例一的第一锁定组件的第三个优选示例的示意图;图12是
本发明实施例一的第一锁定组件的第四个优选示例的示意图;图13是本发明实施例一的第一锁定组件的第五个优选示例的示意图;
115.本发明实施例一提供的手术器械保护装置中,第一抵触部件710通过围绕自身轴线的转动,来改变自身的姿态,即所述第一抵触部件710围绕自身轴线可转动。
116.所述强制保护单元于所述第一状态时,所述第一抵触部件710与安装部224上的第二抵触部件720相适配;所述第一抵触部件710在所述第二抵触部件720的驱动下围绕自身轴线转动,使所述强制保护单元由所述第一状态转换至所述第二状态。
117.请参考图3至图5b,在一个可替代的示范例中,第一抵触部件710具有围绕自身轴线周向分布的第一凸齿711和/或第一凹槽712,相对应的,第二抵触部件720具有围绕自身轴线周向分布的第二凹槽721和/或第二凸齿722。在安装部224处于初始状态,同时强制保护单元于第一状态时,第一凸齿711能够与第二凹槽721相适配卡合,第一凹槽712能够与第二凸齿722相适配卡合,即在安装部224处于初始状态,同时强制保护单元于第一状态时,第一抵触部件710与第二抵触部件720相适配,如图5a所示,由此手术器械221能够安装于安装部224上。可选的,第一抵触部件710的结构可与传动接头226一致,第二抵触部件720的结构可与动力传输件225一致。需要说明的,图3至图5b中所示出的第一抵触部件710和第二抵触部件720仅为一示例,而非对第一抵触部件710和第二抵触部件720之结构的限定。在其它的实施例中,第一抵触部件710和第二抵触部件720只要能够相互啮合,且在第一抵触部件710转动一定的角度后,两者能够相抵触即可。
118.在手术器械221的使用寿命即将到达限值时,例如以使用次数为例,若限值为n次,则已使用n-1次的手术器械221还能够安装于安装部224上,使用n-1次的手术器械221在被安装于安装部224上后,其使用次数即达到n次,计数单元触发动力单元驱动第二抵触部件720转动,带动与第二抵触部件720相适配的第一抵触部件710转动,使强制保护单元由第一状态转换至第二状态。可以理解的,强制保护单元由第一状态转换至第二状态后,手术器械221在未拆离安装部224时,还是可以继续使用的,一旦手术器械221从安装部224上拆离,则由于处于第二状态时的第一抵触部件710无法再次与其它安装部224的处于初始状态的第二抵触部件720相适配,从而使该手术器械221被禁用。
119.具体的,在第一抵触部件710围绕自身轴线转动后,其自身的姿态发生改变,如图5b所示,与一个处于初始状态的第二抵触部件720相比较,此时第一凸齿711不再对准第二凹槽721,两者无法相适配卡合,第一凹槽712也不再对准第二凸齿722,两者也无法相适配卡合,由此,在第一抵触部件710围绕自身轴线转动后,该手术器械221若要再次安装于处于初始状态的安装部224上时,第一抵触部件710将与安装部224上处于初始状态的第二抵触部件720相抵触,从而无法再次安装于安装部224上。
120.请参考图6至图9,优选的,所述强制保护单元包括第一锁定组件910,所述第一锁定组件910包括限位件911以及围绕所述第一抵触部件710的轴线可转动的限位转盘912;所述限位转盘912与所述第一抵触部件710连接;所述限位件911通过限制所述限位转盘912转动,使所述强制保护单元被锁定于所述第二状态。可选的,限位转盘912与第一抵触部件710连接后,两者被限制无相对转动自由度。在图6示出的示范例中,限位转盘912具有非圆形的凹孔,第一抵触部件710具有与该凹孔形状相适配的凸轴,所述凸轴插入凹孔中,使得限位转盘912与第一抵触部件710两者被限制无法相对转动,从而能够传递扭矩,两者能够同步
地转动,因此通过限制限位转盘912转动,即可限制第一抵触部件710转动,从而将强制保护单元锁定于第二状态。确保了强制保护单元无法回退至第一状态,从而确保了使用寿命到达限值的手术器械221无法被再次安装利用。
121.图6至图9示出了第一锁定组件的第一个优选示例,所述限位转盘912具有沿径向开设的限位槽913,所述限位件911沿所述限位转盘912的径向可移动;所述强制保护单元于处于所述第二状态时,所述限位槽913与所述限位件911对准,所述限位件911卡合入所述限位槽913中,以限制所述限位转盘912转动。请参考图8,在强制保护单元于处于第一状态时,限位件911与限位槽913成角度,限位件911未插入限位槽913而不会对限位转盘912的转动产生限制。请参考图9,在第二抵触部件720带动第一抵触部件710转动时,限位转盘912也随同第一抵触部件710产生转动,至强制保护单元转换至第二状态时,限位槽913与限位件911对准,限位件911卡合入限位槽913中,限位转盘912即无法再转动。
122.进一步的,所述强制保护单元还包括阻尼组件920,所述阻尼组件920向所述限位转盘912的转动施加阻力,所述限位转盘912的转动力矩不足以克服所述阻尼组件920的阻力时,所述阻尼组件920限制所述限位转盘912转动。阻尼组件920的设置,使限位转盘912需要较大的转动力矩才能转动,避免处于第一状态的强制保护单元被误触发而转换至第二状态。例如手术器械221在未被安装于安装部224上时,被误操作(如手动拧转)时,阻尼组件920可避免强制保护单元被触发而转换状态。
123.可选的,所述阻尼组件920包括第一弹性件921以及沿所述限位转盘912之径向可移动的阻尼滑块922,所述第一弹性件921向所述阻尼滑块922施加弹性力,以使所述阻尼滑块922抵靠于所述限位转盘912上。在图6至图9示出的示范例中,阻尼滑块922可与限位件911为同一部件,即限位件911同时起到阻尼滑块922的作用。
124.进一步的,所述限位转盘912具有沿径向开设的凹口914,至少所述强制保护单元处于所述第一状态时,所述阻尼滑块922抵靠于所述凹口914处。在图6至图9示出的示范例中,限位转盘912仅具有一个凹口914,限位转盘912的转动力矩较大时,能够使阻尼滑块922从凹口914中脱出而使限位转盘912能够转动。可选的,所述凹口914具有与所述阻尼滑块922相适配的引导壁,所述引导壁用于引导所述阻尼滑块922滑入所述凹口914。在图6至图9的示范例中,所述引导壁如可为斜坡面,相适配的,阻尼滑块922的头端亦具有斜面,阻尼滑块922的头端可在引导壁的引导下滑入凹口914中。可以理解的,在其它的一些实施例中,阻尼滑块922与限位转盘912也可以通过摩擦力形成阻尼,本实施例对此不限。
125.图10示出了第一锁定组件的第二个优选示例,该优选示例与图9示出的优选示例大致相同,但限位转盘912具有多个凹口914,使得限位转盘912呈齿轮状。限位转盘912的转动力矩较大时,限位转盘912转动,带动阻尼滑块922沿多个凹口914中依次划过,直至最终与限位槽913对准卡合,限位转盘912被锁死。
126.图11示出了第一锁定组件的第三个优选示例,所述限位转盘912具有沿轴向开设的限位槽913,所述限位件911沿所述限位转盘912的轴向可移动;所述强制保护单元于处于所述第二状态时,所述限位槽913与所述限位件911对准,所述限位件911卡合入所述限位槽913中,以限制所述限位转盘912转动。可以理解的,在另一些实施例中,可以同时设置轴向开设的限位槽913和径向开设的限位槽913,相应的,也同时设置轴向移动和径向移动的限位件911。
127.图12示出了第一锁定组件的第四个优选示例,所述限位转盘912包括棘轮,所述限位件911包括棘爪;所述强制保护单元于所述第一状态转换至所述第二状态的过程中,所述棘爪限制所述棘轮单向转动。由于棘爪和棘轮的配合能够限制限位转盘912单向转动,因此限位转盘912与第一抵触部件710在第二抵触部件720驱动下能够沿单向转动,使强制保护单元由第一状态转换至所述第二状态,但限位转盘912与第一抵触部件710无法反向转动,从而使强制保护单元被锁定在第二状态。进一步的,限位转盘912也可具有多个凹口914,配合阻尼滑块922,能够限制限位转盘912与第一抵触部件710在受到较小的转动力矩时不会产生误触发。
128.进一步的,所述限位转盘912还包括限位面915,所述限位件911还包括抵靠结构916;所述强制保护单元于所述第一状态转换至所述第二状态后,所述限位面915与所述抵靠结构916相抵靠,以限制所述限位转盘912继续转动。限位面915和抵靠结构916的设置,能够保证强制保护单元在转换至第二状态后,第一抵触部件710无法继续转动,确保强制保护单元被锁定在第二状态。可选的,抵靠结构916可以与棘爪分离设置,例如抵靠结构916可设置于阻尼滑块922的侧壁上。
129.图13示出了第一锁定组件的第五个优选示例,其与图12示出的第四个优选示例相似,此处不再重复。
130.基于如上所述的手术器械保护装置,本实施例还提供一种手术器械221,其包括如上所述的手术器械保护装置,并且,第一基板2212用于在所述手术器械保护装置的强制保护单元处于所述第一状态时,与安装部224抵靠连接而使所述手术器械221安装于所述安装部224上。
131.本实施例还提供一种安装部224,其用于与如上所述的手术器械221装配;所述安装部224的第二基板2241用于在所述手术器械保护装置的强制保护单元处于所述第一状态时,与所述第一基板2212抵靠连接。
132.进一步的,所述安装部224还包括第二抵触部件720,在所述第二抵触部720件处于初始状态时,与处于所述第一状态的强制保护单元的第一抵触部件710相适配;并与处于所述第二状态的强制保护单元的第一抵触部件720相抵触。可选的,所述第二抵触部件720围绕自身的轴线可转动,所述第二抵触部件720在动力装置223的驱动下,带动所述第一抵触部件710转动。
133.更进一步的,本实施例还提供一种手术器械组件,其包括动力装置223、如上所述的手术器械221和如上所述的安装部224;所述动力装置223通过所述安装部224与所述手术器械221连接;所述手术器械保护装置的动力单元设置于所述动力装置223中。可以理解的,由于本实施例提供的手术器械221、安装部224和手术器械组件均包括或与本实施例提供的手术器械保护装置产生关系,因此其均具备手术器械保护装置所带来的有益效果。手术器械221、安装部224和手术器械组件的其它部件和原理请参考现有技术,本实施例对此不再重复。
134.【实施例二】
135.请参考图14至图22b,其中,图14是本发明实施例二的手术器械与安装部的安装示意图;图15a是本发明实施例二的强制保护单元处于第一状态的示意图;图15b是本发明实施例二的强制保护单元处于第二状态的示意图;图16a是本发明实施例二另一示例的强制
保护单元处于第一状态的示意图;图16b是本发明实施例二另一示例的强制保护单元处于第二状态的示意图;图17a是本发明实施例二的安装部的示意图,其中第二抵触部件处于初始状态;图17b是本发明实施例二的安装部的示意图,其中第二抵触部件伸出;
136.图18是本发明实施例二的手术器械与安装部的轴向剖面图;图19a是本发明实施例二的第二锁定组件的轴向剖面图,其中强制保护单元处于第一状态;图19b是本发明实施例二的第二锁定组件的轴向剖面图,其中第一抵触部件处于触发位置;图19c是本发明实施例二的第二锁定组件的轴向剖面图,其中强制保护单元处于第二状态;图20是本发明实施例二的触发组件的分解示意图;图21a是本发明实施例二的触发组件于强制保护单元处于第一状态时的示意图;图21b是本发明实施例二的触发组件于第一抵触部件处于触发位置的示意图;图21c是本发明实施例二的触发组件于强制保护单元处于第二状态时的示意图;图22a是本发明实施例二的第一抵触部件与第一滑块的示意图;图22b是本发明实施例二的第一抵触部件与第一滑块的轴向剖面图。
137.本发明实施例二的手术器械保护装置、手术器械、安装部及手术器械组件与实施例一的手术器械保护装置、手术器械、安装部及手术器械组件基本相同,对于相同部分不再叙述,以下仅针对不同点进行描述。
138.在本实施例二中,第一抵触部件710的机械运动的方式与实施例一不同。具体的,在本实施例二中,第一抵触部件710沿自身轴线的移动,来改变自身的位置,即所述第一抵触部件710沿自身轴向可移动。
139.所述强制保护单元于所述第一状态时,所述第一抵触部件710与安装部224上的第二抵触部件720相适配;所述第一抵触部件710在所述第二抵触部件720的驱动下沿自身轴向移动,使所述强制保护单元由所述第一状态转换至所述第二状态。
140.请参考图14至图17b,在一个可替代的示范例中,相对于第一基板2212,第一抵触部件710能够沿自身轴向移动。例如在图15a和图15b示出的示范例中,在强制保护单元于第一状态时,第一抵触部件710相对第一基板2212处于凹下位置,而第一抵触部件710沿自身轴向移动而伸出后,强制保护单元转换至第二状态。请参考图17a,相适配的,安装部224处于初始状态时,其具有凸起于第二基板2241的第二抵触部件720,于是,当强制保护单元处于第一状态时,第二抵触部件720能够插入第一基板2212于第一抵触部件710处的凹下的区域中,两者相适配,从而允许第一基板2212和第二基板2241相抵靠,由此手术器械221能够安装于安装部224上。当然在其它的一些实施例中,如图16a和图16b示出的另一个示范例中,在强制保护单元于第一状态时,第一抵触部件710相对第一基板2212相平齐,而第一抵触部件710沿自身轴向移动而凸出后,强制保护单元转换至第二状态。
141.进而当第一抵触部件710相对第一基板2212沿自身轴向移动而伸出后,第一基板2212于第一抵触部件710处的凹下区域被填塞,若该手术器械221再次与一个处于初始状态的安装部224相装配时,安装部224上的第二抵触部件720无法插入第一基板2212于第一抵触部件710处的凹下的区域中,从而使得第一抵触部件710无法再次与其它安装部224的处于初始状态的第二抵触部件720相适配,从而使该手术器械221被禁用。
142.请参考图18至图19c,所述强制保护单元包括第二锁定组件930,所述第二锁定组件930包括第一滑块931和第二滑块932,所述第一滑块931沿所述第一抵触部件710的轴向可移动,并与所述第一抵触部件710连接;所述第二滑块932沿所述第一抵触部件710的径向
可移动;所述第二滑块932通过限制所述第一滑块931的轴向移动,使所述强制保护单元被锁定于所述第二状态。
143.优选的,所述强制保护单元自所述第一状态转换至所述第二状态时,所述第一滑块931沿轴向移至第一位置,如图19c所示,所述第二滑块932沿径向移动并与所述第一滑块931抵靠,以限制所述第一滑块931自所述第一位置向远离所述第二抵触部件720的方向(图19c中为下方)移动。如此,在第一抵触部件710伸出(图19c为上方)后,第二滑块932卡入第一滑块931远离第二抵触部件720的一侧(图19c中为下侧),这样第一滑块931即无法向图19c中的下方移动,从而使强制保护单元被锁定于第二状态。
144.第一抵触部件710在第二抵触部件720的驱动下沿自身轴向移动,实际中有多种实现方式,在一个示范性的实施例中,如图17a和图17b所示,第二抵触部件720通过朝向第一抵触部件710伸出,通过抵靠推动的方式实现驱动第一抵触部件710沿轴向移动。进一步的,所述强制保护单元包括推力组件,所述推力组件向所述第一抵触部件710施加朝向所述第二抵触部件720的推力。
145.请参考图19a至图19c,在一个可替代的示范例中,所述推力组件包括第一滑块931和第二滑块932。即第一滑块931和第二滑块932除了用作第二锁定组件930,同时还可以用作为推力组件。具体的,所述第一滑块931具有第一斜面9311,所述第二滑块932具有第二斜面9321,所述第一斜面9311与所述第二斜面9321的倾斜方向相同;所述第一滑块931的轴向移动与所述第二滑块932的径向移动,通过所述第二斜面9321与所述第一斜面9311的抵靠实现转换。
146.更进一步的,所述推力组件还包括第二弹性件933,所述第二弹性件933向所述第二滑块932施加弹性力,所述弹性力指向所述第一抵触部件710的轴线。第二弹性件933如可为弹簧、弹片、同极相对的磁块组等本领域常见的结构;第二弹性件933对第二滑块932施加弹性力,第二滑块932通过第二斜面9321与所述第一斜面9311的抵靠,改变所述弹性力的方向为沿第一滑块931的轴向朝向第二抵触部件720。由此,在第一滑块931的位置限制被解除时,即可推动第一滑块931向第二抵触部件720的方向伸出。进一步的,在第一滑块931向第二抵触部件720的方向伸出移至第一位置时,第二滑块932在第二弹性件933的弹性力作用下继续沿径向移动,并卡入第一滑块931远离第二抵触部件720的一侧,使强制保护单元被锁定于第二状态。
147.为了使第一滑块931在强制保护单元处于第一状态时,不会自发地被第二弹性件933推动而朝向第二抵触部件720伸出,本实施例中,所述强制保护单元还包括触发组件。请继续参考图19a至图19c,所述第一滑块931在所述第二抵触部件720的推动下,沿远离所述第二抵触部件720的方向(图19a至图19c中为下方)移动至触发位置前(如图19a所示),所述触发组件限制所述第一滑块931在朝向所述第二抵触部件720的方向上(图19a至图19c中为向上)不超出第二位置;以使所述第一抵触部件710与所述第二抵触部件720相适配;实际中,在未被触发前,触发组件能够限制第一滑块931伸出,即限制第一滑块931向图19a中的上方移动。结合图18可知,这样可使得第一抵触部件710相对第一基板2212处于凹下位置,使得强制保护单元处于第一状态。
148.在所述第一滑块931沿远离所述第二抵触部件720的方向(图19a至图19c中为向下)移动至触发位置后(如图19b所示),所述触发组件解除对所述第一滑块931的限制,所述
第一滑块931在所述推力组件的推力作用下,朝向所述第二抵触部件720的方向(图19a至图19c中为向上)移动至第一位置(如图19c所示)。实际中,第二抵触部件720向第一抵触部件710的方向(图19a至图19c中为向下)移动,能够将第一滑块931向下推至触发位置,至此触发组件被触发,解除对所述第一滑块931的限制。但此时手术器械221与安装部224还处于安装状态,第一抵触部件710继续被第二抵触部件720所抵靠限制。当该手术器械221与安装部224分离后,第一抵触部件710不再受到第二抵触部件720的限制,推力组件施加的推力即推动第一滑块931移动至第一位置,使得第一抵触部件710伸出而填塞第一基板2212于第一抵触部件710处的凹下区域,同时第二滑块932卡入第一滑块931下方,将强制保护单元锁定于第二状态。由此,该手术器械221若要再次安装于处于初始状态的安装部224上时,第一抵触部件710将与安装部224上处于初始状态的第二抵触部件720相抵触,从而无法再次安装于安装部224上。需要说明的,这里的填塞,并非限定是完全填满,也可以是部分填塞。
149.下面结合图20至图21c,对触发组件的一个示范性的实施例进行说明。可选的,所述触发组件包括沿自身轴向开设的引导孔940,所述第一抵触部件710的横截面形状与所述引导孔940的横截面形状相适配;所述第一抵触部件710的至少部分可活动地穿设于所述引导孔940中。引导孔940如可沿第一基板2212的轴向开设于第一基板2212上,引导孔940能够限制第一抵触部件710的径向自由度,以引导第一抵触部件710沿轴向移动。较佳的,引导孔940的横截面形状和第一抵触部件710的横截面形状均为圆形,所述第一抵触部件710围绕自身轴线可转动,所述第一抵触部件710的轴线与所述引导孔940的轴线重合,这样引导孔940不限制第一抵触部件710的周向转动。
150.所述触发组件包括导向槽941和导向块942,所述导向块942沿所述导向槽941的延伸方向可移动地设置于所述导向槽941中;所述导向槽941和导向块942中的一者设置于所述第一抵触部件710上,另一者设置于所述引导孔940的侧壁上。在图20示出的示范例中,导向块942向内凸起设置于所述引导孔940的侧壁上,而相对的,导向槽941设置于第一抵触部件710上。可以理解的,在其它的实施例中,也可以是导向块942设置于第一抵触部件710上,而导向槽941设置于引导孔940的侧壁上,两者可以实现类似的效果。
151.其中,所述导向槽941包括沿所述第一抵触部件710的轴向设置的第一子导向槽941a和与所述第一子导向槽941a连通的第二子导向槽941b,所述第二子导向槽941b相对于所述第一导向槽941a倾斜设置;所述第二子导向槽941b与所述第一子导向槽941a连通的一端(图20中第二子导向槽941b左上方的一端)远离所述第二抵触部件720(位于图20中的上方),另一端(图20中第二子导向槽941b右下方的一端)靠近所述第二抵触部件720并且位于所述第一子导向槽941a的两个端部之间,使得整个导向槽941形成“卜”字形。
152.在所述第一滑块931沿远离所述第二抵触部件720的方向(图20中为向下)移动至触发位置前,所述导向块942位于所述第二子导向槽941b中,如图21a所示。此时由于导向块942与第二子导向槽941b的端部(即“卜”字形的点的端部)相抵靠,第一滑块931朝向第二抵触部件720的方向(图20中为向上)的位移,亦即第一抵触部件710向上的位移被限制,从而使第一抵触部件710相对第一基板2212处于凹下位置,强制保护处于第一状态。
153.在所述第一滑块931沿远离所述第二抵触部件720的方向移动至触发位置后,如图21b和图21c所示,所述导向块942位于所述第一子导向槽941a中,此时第一抵触部件710向上的位移不再被限制,在推力组件的推力下,第一滑块931以及第一抵触部件710即可向上
伸出,从而填塞第一基板2212处的凹下位置。
154.请参考图22a和图22b,可选的,第一滑块931与第一抵触部件710可转动地连接,两者的轴向自由度被限制,但并不限制周向转动。以图21a至图21c所示为例进行说明,通过导向槽941和导向块942的设置,第一抵触部件710在被第二抵触部件720推动而向下移动的同时,第一抵触部件710自身还产生围绕自身轴线的周向转动,以使导向块942沿第二子导向槽941b移动。在图22a和图22b示出的示范例中,第一抵触部件710大致呈一圆筒状,其外壁上开设有所述导向槽941。第一滑块931通过t字型的连接结构与第一抵触部件710可转动地连接,由此,第一滑块931与第一抵触部件710可转动,但两者的轴向自由度被限制。当然上述图22a和图22b示出的示范例仅为第一滑块931与第一抵触部件710的一个示范性的实施例而非对第一滑块931与第一抵触部件710结构的限定,本领域技术人员可根据实际选用其它的结构。
155.请参考图17a和图17b,本实施例二提供的安装部224与实施例一提供的安装部224也存在一些区别。可选的,所述第二抵触部件720沿自身轴向可移动,所述第二抵触部件720在动力装置223的驱动下,带动所述第一抵触部件710轴向移动。在一个实施例中,第二抵触部件720如可通过传动组件与动力装置223中的动力单元(如电机)连接,优选的,动力单元的转动能够通过传动组件转换为第二抵触部件720沿自身轴向的移动。传动组件(图中未示出)的具体结构如可包括齿轮、齿条;涡轮、蜗杆;丝轮、丝杆等本领域常见的传动结构和动力转换结构,本实施例对此不限。本实施例对传动组件的设置位置亦不作限制,其可以设置在安装部224上,也可以设置在动力装置223上,本实施例对此亦不作限制。
156.可以理解的,第一抵触部件710在第二抵触部件720的驱动下沿自身轴向移动,实际中有多种实现方式,在其它的一些实施例中,第一抵触部件710和第二抵触部件720如可通过卡扣、螺纹、磁力等本领域常见的力传递方式,来驱动第一抵触部件710沿轴向移动。下面以磁力为例,结合图18进行说明,第二抵触部件720如可包括一电磁铁,第一抵触部件710包括一铁块,第二抵触部件720在初始状态时,电磁铁不通电。在手术器械221到达使用寿命时,电磁铁通电产生吸力。在手术器械221与安装部224分离时,由于电磁铁通电而具有吸力,第一抵触部件710被带动着向图18中上方拖动,直至第一滑块931移至一定的位置,第二滑块932即锁定第一滑块931的位置。可以理解的,本领域技术人员还可以将第一抵触部件710和第二抵触部件720配置为其它如卡扣或螺纹等力传递方式,本实施例在此不再展开说明。
157.在上述两个实施例中,强制保护单元由第一状态转换至第二状态后,手术器械221上的第一抵触部件710由于会产生机械运动改变自身位置和/或姿态,由此操作者可通过外观识别使用寿命到达限值的手术器械221,提高辨识率,可节省不必要的器械安装时间。
158.综上所述,本发明提供的手术器械保护装置包括:强制保护单元和计数单元;所述强制保护单元具有第一状态和第二状态,所述强制保护单元处于所述第一状态时,允许手术器械安装于安装部上;所述强制保护单元处于所述第二状态时,禁止所述手术器械再次安装于安装部上;所述计数单元用于获取所述手术器械的使用寿命,并在所述手术器械的使用寿命到达限值时,向外部的动力单元发送驱动信号;进而所述强制保护单元在所述动力单元的驱动下由所述第一状态转换至所述第二状态。如此配置,在手术器械的使用寿命到达限值时,强制保护单元由第一状态转换至第二状态,从而禁止该手术器械再次安装于
安装部上,由此起到强制保护作用,使到达限制使用寿命的手术器械无法再次被安装于安装部,杜绝了再次利用风险。此外,由于强制保护单元由第一状态转换至第二状态,能够通过外观识别手术器械无法再次使用,提高操作者对到达限制使用寿命的手术器械的辨识率。
159.需要说明的,上述若干实施例之间可相互组合。上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求书的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。