1.本发明涉及一种利用行扫描用摄像头对产品表面进行检查的技术领域。
背景技术:
2.包括智能手机、平板电脑、笔记本电脑等便携式信息技术(it)设备产业在内的电动汽车、混合动力汽车等产业正在快速发展。如上所述的产业也在引领多种附属产业的发展。作为一实例,伴随着智能手机种类的增加以及智能手机使用周期的缩短,可以快速且准确地对多种多样的不同类型的智能手机进行检查的系统相关产业也在快速成长。
3.因此,与智能手机屏幕玻璃的外形缺陷检测系统相关的市场也在变得日益庞大。
4.目前为止,在对智能手机的屏幕玻璃上的缺陷进行检查时所采用的是利用面扫描摄像头(area scan camera)以及行扫描摄像头(line scan camera)通过单纯照明方式对被照物体的外形以及表面进行检查的方式。
5.如上所述的外形以及表面检查系统因为单纯的结构以及低廉的费用而只能对有限类型的不良以及有限形态的型号进行检查,但是目前因为没有适当的替代方案而仍然被广泛使用。
6.因为现有的表面检查系统无法根据不同的曲面形态的型号对照明方向以及光量进行调节,因此会因为眩光(glare)现象即因为强烈的白色反光而无法对表面进行检查的现象而导致无法执行检查或无法对旨在特定方向上的光线上呈现出的不良进行检测的问题。
7.先行技术文献
8.专利文献
9.(专利文献1)大韩民国注册专利第10-0824808号(公告日期:2008.04.24)
技术实现要素:
10.本发明旨在解决解决在对被照物体的表面进行检查时因为发生眩光现象而无法准确地对被检查物体的表面状态进行检查的问题。
11.本发明的技术课题并不限定于在上述内容中提及的课题,相关从业人员将可以通过下述记载进一步明确理解未被提及的其他技术课题。
12.为了达成如上所述的技术课题,本发明的行扫描用非郎伯表面检查系统,包括:表面检查部,在一侧面以及另一侧面中的至少一个上形成曲线形的搁置孔,包括在上端形成拍摄孔的框架模块以及通过在所述搁置孔中安装多个而向放置在底面上的被检查物体沿着斜线照射光线的第一照明模块以及第二照明模块;
13.摄像头部,位于所述拍摄孔的上方,通过贯通所述拍摄孔并对位于底面上的被检查物体进行拍摄而生成包括第一照明图像以及第二照明图像在内的整体合成图像;以及,
14.控制器部,用于对所述摄像头部的工作进行控制,通过选择性地驱动所述第一照明模块以及所述第二照明模块工作而对通过所述摄像头部拍摄到的所述第一照明图像以
及所述第二照明图像进行接收;
15.控制器部,
16.在设定时间内打开第一照明模块之后再将其关闭,
17.在关闭第一照明模块时打开第二照明模块,
18.在第一照明模块被打开时接收通过摄像头部拍摄到的第一照明图像,
19.在第二照明模块被打开时接收通过摄像头部拍摄到的第二照明图像,
20.控制器部,包括:
21.照明图像接收模块,用于将通过摄像头部拍摄到的第一照明图像以及第二照明图像按照所设定的行(row)或列(column)的区域进行接收;
22.对齐模块,用于对第一照明图像的多个行(row)或列(column)的部分图像以及第二照明图像的多个行(row)或列(column)的部分图像进行对齐;
23.直方图模块,用于将第一照明图像以及第二照明图像分割成多个区块并在为各个区块分配位置编号之后提取出区块的反射度值;
24.去除模块,通过对预先设定的基准反射度值以及从区块中测定到的反射度值进行对比而删除具有与基准反射度值相比更大的反射度值的区块;以及,
25.区块补正图像模块,在从第一照明图像中删除具有与基准反射度值相比更大的反射度值的区块之后,从第二照明图像接收与从第一照明图像删除的区块相同位置上的区块并通过映射到第一照明图像而生成第一区块补正图像,
26.在从第二照明图像中删除具有与基准反射度值相比更大的反射度值的区块之后,从第一照明图像接收与从第二照明图像删除的区块相同位置上的区块并通过映射到第二照明图像而生成第二区块补正图像;
27.控制器部,还包括:
28.合成图像生成模块,通过按照预先设定的算式对第一区块补正图像以及第二区块补正图像进行演算之后再进行合成而生成合成图像;
29.合成图像生成模块,
30.在合成图像的设定区域中加工成反射率图像,
31.或在合成图像中沿着x轴方向计算出被检查物体的表面高度的变化量并加工成x轴偏微分图像,
32.或加工成在合成图像中沿着y轴方向计算出被检查物体的表面高度的变化量的y轴偏微分图像,
33.或加工成将x轴偏微分图像以及y轴偏微分图像沿着x轴方向以及y轴方向计算出被检查物体的表面高度的变化量的2此偏微分图像。
34.所述框架模块,
35.可以以包含于半球形中的形状形成。
36.所述框架模块,还可以包括:
37.反射板,安装在上侧面。
38.所述框架模块,其特征在于,包括:透光板,安装在所述拍摄孔中且在上侧面形成有用于将光线反射到下部方向的光点图形;以及,辅助照明模块,通过在所述透光板的侧面安装多个而向所述透光板的内部照射光线;而所述辅助照明模块的特征在于,通过所述控
制器部20对其亮度进行调节。
附图说明
39.图1是适用本发明之一实施例的行扫描用非郎伯表面检查系统的使用状态图。
40.图2是对通过适用本发明之一实施例的行扫描用非郎伯表面检查系统实际获取到的多个区块补正图像进行图示的示意图。
41.图3是适用本发明之一实施例的行扫描用非郎伯表面检查系统的块图。
42.图4是图1中的表面检查部的斜视图。
43.图5是对安装在图4中所图示的框架模块上的照明模块的旋转状态以及从第一照明模块以及第二照明模块斜线输出光线的状态进行图示的示意图。
44.图6是对在图4中所图示的框架模块上安装反射板的状态下的表面检查部进行图示的示意图。
45.图7是对安装在图4中所图示的框架模块上的多个照明模块进行简要图示的示意图。
46.图8是与适用本发明之一实施例的行扫描用非郎伯表面检查系统的工作相关的顺序图。
47.图9至图13是对在适用本发明之一实施例的行扫描用非郎伯表面检查系统的工作过程以及工作过程中所呈现出的图像进行图示的示意图。
48.图14是对拍摄图像以及多个区块补正图像进行图示的示意图。
49.图15是对在框架模块中安装透光板的形态进行图示的斜视图。
50.图16是对在框架模块中安装透光板以及反射板的状态进行图示的斜视图。
51.图17是对通过透光板放射出散射光线的形态进行图示的正面图以及侧面图。
52.图18是对透光板进行图示的平面图。
53.图19是对散射光线照明的适用与否相关的图像差异(左:没有散射光线照明,右:有散射光线照明)进行图示的例示图。
54.图20是对检测划痕以及戳痕的过程进行图示的例示图。
55.图21是与散射光线与否相关的曲线(左:噪声严重,右:已去除噪声)。
56.图22是与散射光线与否相关的表面直方图分布图(左:因为平滑化而造成较高的偏差,右:因为平滑化较低而造成偏差较低)。
57.【符号说明】
58.1:行扫描用非郎伯表面检查系统
59.10:表面检查部
60.110:框架模块
61.111:搁置孔
62.112:拍摄孔
63.113:反射板
64.114:透光板
65.121:第一照明模块
66.122:第二照明模块
67.125:辅助照明模块
68.20:摄像头部
69.30:控制器部
70.310:照明图像接收模块
71.320:对齐模块
72.330:直方图模块
73.340:去除模块
74.350:区块补正图像模块
75.360:合成图像生成模块
76.a:被检查物体
77.b:底面
78.c:整体接收图像
79.d1:第一部分图像
80.d2:第二部分图像
81.d3:第三部分图像
82.d4:第四部分图像
83.e1:第一照明图像
84.e2:第二照明图像
85.e3:第三照明图像
86.e4:第四照明图像
87.f1、f2、f3、f4:各图像区块划分、眩光部分去除图像
88.g1:第一区块补正图像
89.g2:第二区块补正图像
90.g3:第四区块补正图像
91.g4:第四区块补正图像
92.h:合成图像
93.h1:反射率图像
94.h2:x轴偏微分图像
95.h3:y轴偏微分图像
96.h4:2次偏微分图像
97.h5:表面垂直向量图像
98.i:光线
具体实施方式
99.在本说明书中所图示的附图以及参阅附图进行说明的内容,只是为了帮助具有本发明之技术领域之一般知识的人员更加轻易地理解本发明而提供的示例性内容。因此,本发明的附图以及用于实施本发明的具体说明并不是为了对本发明的权利要求范围做出限定。本发明的权利要求范围只应通过权利要求书做出定义。
100.接下来,将参阅本发明的下述实施例的附图对本发明的行扫描用非郎伯表面检查
系统进行详细的说明。但是,为了可以更加明确而且简洁地对本发明进行说明,首先将参阅图1以及图2对行扫描用非郎伯表面检查系统进行概要性说明。此外,将参阅图3至图7对构成行扫描用非郎伯表面检查系统的构成要素进行详细的说明。
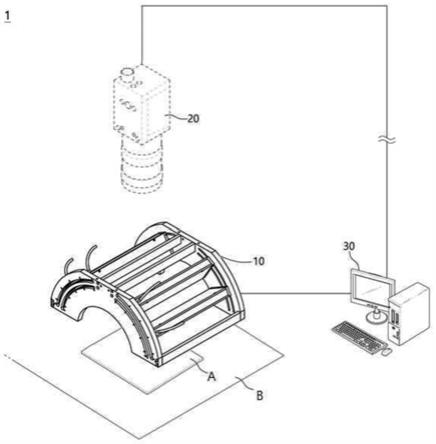
101.图1是适用本发明之一实施例的行扫描用非郎伯表面检查系统的使用状态图,图2是对通过适用本发明之一实施例的行扫描用非郎伯表面检查系统适用于最终检查的多个合成图像进行图示的示意图。
102.本发明的行扫描用非郎伯表面检查系统1,作为其构成要素包括表面检查部10、摄像头部20以及控制器部30,可以通过控制器部30驱动表面检查部10以及摄像头部20工作。此时,表面检查部10中所包含的多个照明模块根据控制器部30的工作按照预先指定的组合的顺序输出光线,而反射板113将从照明模块121~12n输出并散射的光线重新照射到被检查物体a。
103.进而,行扫描用非郎伯表面检查系统1的控制器部30根据照明模块的工作驱动摄像头部20并对被检查物体a进行拍摄,并获取包含多个方向的照明下的表面信息的从摄像头部20接收到的整体接收图像c。
104.此时,整体接收图像c可以通过内部所包含的复合各个照明特性的行图像d1~d4变形为多个照明图像e1至e4(参阅图11)。
105.此时,行扫描用非郎伯表面检查系统1的控制器部30可以通过将所生成的多个照明图像e1~e4按照行(row)或列(column)的区域进行分割并对多个行(row)或列(column)区域进行对齐而生成个体图像f1~f4,接下来在将各个图像f1~f4(参阅图13)分割成多个区块并计算出各个区块的反射度值之后与预先设定的基准反射度值进行比较,从而去除高于基准反射度值的区块。此外,通过利用其他有效图像对与所去除的部分对应的区块进行插值而生成区块补正图像。
106.其中,区块补正图像g1~g4可以根据照明模块121~12n的数量对应形成。作为一实例,在具有四个照明模块的情况下,可以生成第一区块补正图像g1至第四区块补正图像g4。
107.接下来,行扫描用非郎伯表面检查系统1可以通过对所生成的多个区块补正图像g1~g4中的至少2个进行合成而生成合成图像h。具体来讲,如图2所示,可以通过对第一区块补正图像g1至第四区块补正图像g4中的至少2个进行合成而加工成反射率图像h1、向x方向偏微分的图像h2、向y方向偏微分的图像h3、2次偏微分的图像h4以及垂直向量图像h5。
108.借此,本发明的行扫描用非郎伯表面检查系统1可以利用摄像头部20以及向不同的角度偏向的多个照明模块121~124,通过不同照射方向上的反射度、阴影解决现有的表面检查系统所具有的问题,即在对曲面形态的型号的表面进行检查时防止发生眩光现象。
109.进而,本发明的行扫描用非郎伯表面检查系统1可以通过根据测定以及检查对象对所述图像进行取舍选择以及合成而提升对被检查物体的检查的可靠性。
110.借此,行扫描用非郎伯表面检查系统1可以在产业现场,尤其是在如焊接等受到烟熏以及碳化污染的对象中准确地检测出黑色的污染和黑色的划痕以及戳痕等在被检查物体a上形成的伤痕。
111.接下来,将参阅图3至图7对构成行扫描用非郎伯表面检查系统的构成要素进行详细的说明。
112.图3是适用本发明之一实施例的行扫描用非郎伯表面检查系统的块图,图4是图1中的表面检查部的斜视图。此外,图5是对安装在图4中所图示的框架模块上的照明模块的旋转状态以及从第一照明模块以及第二照明模块斜线输出光线的状态进行图示的示意图,图6是对在图4中所图示的框架模块上安装反射板的状态下的表面检查部进行图示的示意图。此外,图7是对安装在图4中所图示的框架模块上的多个照明模块进行简要图示的示意图。
113.表面检查部10是为了利用摄像头部20对被检查物体a进行拍摄而以多种不同的角度向被检查物体a照射光线的装置。如上所述的表面检查部10以包含于半球形中的形状形成,包括在上端形成有拍摄孔112的框架模块110,以及安装在框架模块110上并进行转动和移动的照明模块。
114.其中,如图4所示,在框架模块110的一侧面以及另一侧面中的至少一个形成曲线形的搁置孔111,而且在搁置孔111中安装有用于向放置在底面上的被检查物体a斜线输出光线的多个照明模块。
115.此时,多个照明模块是针对行扫描(line scan)进行优化的阴影公制系统(sms,shadow-metric system)用照明。在本说明书中,为了可以更加简洁且明确地对安装在表面检查部10中的多个照明模块进行说明,将以第一照明模块121、第二照明模块122、第三照明模块123以及第四照明模块124为例。此时,第一照明模块121、第二照明模块122、第三照明模块123以及第四照明模块124可以是针对行扫描(line scan)进行优化的阴影公制系统(sms,shadow-metric system)用照明。如上所述的第一照明模块121至第四照明模块124如图5中的(a)所示,可以在搁置孔111中选择性地进行旋转,也可以如图5中的(b)以及(c)所示,以倾斜45度的状态输出光线。
116.此外,表面检查部10如图6所示,可以包括安装在框架模块110的上侧面上的反射板113,从而通过对从多个照明模块输出并散射的光线进行反射而使其再次照射到被检查物体a上。此时,第一照明模块121安装在位于左侧的搁置孔111的下端,第二照明模块122与第一照明模块121相距一定间隔并安装在位于左侧的搁置孔111的上端。此外,第三照明模块123安装在位于右侧的搁置孔111的上端,第四照明模块124与第三照明模块123相距一定间隔并安装在位于右侧的搁置孔111的下端。
117.如上所述,在搁置孔111中相距一定间隔安装的第一照明模块121至第4照明模块124可以在所安装的位置上进行旋转并以多种不同的方向向被检查物体a照射出光线。此外,也可以沿着搁置孔111移动并在多种不同的位置上向被检查物体a照射出光线。
118.摄像头部20位于拍摄孔112的上侧并贯通拍摄孔112对位于底面b上的被检查物体a进行拍摄,从而接收包括第一照明图像e1以及第二照明图像e2的整体图像c。
119.具体来讲,摄像头部20可以在拍摄孔112的上侧以镜头位于与拍摄孔112重叠的位置上的方式安装。如上所述的摄像头部20可以贯通拍摄孔112对位于底面上的被检查物体a进行拍摄,从而生成照明图像。
120.如上所述的摄像头部20根据从控制器部30输出的控制信号工作。尤其是,摄像头部20的工作可以与照明模块121~12n的工作同步,从而只有在照明模块121~12n被打开时工作并对被检查物体a进行拍摄。
121.如上所述的摄像头部20可以在第一照明模块121、第二照明模块122、第三照明模
块123以及第四照明模块124根据检查对象按照组合以及指定的顺序被打开时生成第一照明图像e1至第四照明图像e4。作为一实例,摄像头部20在第一照明模块121被打开时拍摄第一照明图像e1,在第二照明模块122被打开时拍摄第二照明图像e2,在第三照明模块123被打开时拍摄第三照明图像e3,在第四照明模块124被打开时拍摄第四照明图像e4。
122.控制器部30是生成控制信号并对数据进行接收和处理的计算机。如上所述的控制器部30可以在利用行扫描(line scan)的交叉照明控制过程中以纳秒(nano second)单位对照明时间以及延迟时间进行控制。如上所述的控制器部30因为现有的利用微控制器中央处理器(microcontroller cpu)的控制器控制板受限,因此包括单独的搭载有现场可编程门阵列(fpga)芯片的控制板。
123.因此,控制器部30可以根据检查对象将如照明顺序、频率划分以及噪声去除等在现场出现的问题立即反映到程序中。此外,控制器部30如图3所示,可以包括照明图像接收模块310、对齐模块320、直方图模块330、去除模块340、区块补正图像模块350、合成图像生成模块360以及控制信号生成模块370等。
124.如上所述的控制器部30可以在控制信号生成模块370中生成控制信号并驱动多个照明模块12以及摄像头部20工作。作为一实例,控制器部30可以在将第一照明模块121打开一定时间之后关闭,并在关闭第一照明模块121时打开第二照明模块122。此外,可以在关闭第二照明模块122时打开第三照明模块123,并在关闭第三照明模块123时打开第四照明模块124。
125.控制器部30用于打开以及关闭第一照明模块121至第四照明模块124,可以打开第一照明模块121至第四照明模块124。控制器部30可以在每次行扫描时根据检查速度效率按照预先设定的基准在排除特定的各个照明或对其亮度进行调整的同时周期性地将其点亮。作为一实例,对于a被检查物体,可以依次打开第一照明模块121、第二照明模块122以及第四照明模块124并生成第一照明图像、第二照明图像以及第四照明图像,而对于b被检查物体,可以依次打开第一照明模块121、第二照明模块122以及第三照明模块123并生成第一照明图像、第二照明图像以及第三照明图像。
126.此外,控制器部30可以驱动摄像头部20生成第一照明图像至第四照明图像并对所生成的各个照明图像进行接收。控制器部30可以通过对照明图像进行加工而生成加工图像,即反射率图像h1、向x方向偏微分的图像h2、向y方向偏微分的图像h3、2次偏微分的图像h4以及垂直向量图像h5。
127.具体来讲,控制器部30可以通过照明图像接收模块310从摄像头部20获取包括多个图像信息的整体图像c。此外,从整体图像c选择性地提取出不同照明组的图像划分d1~d4并生成第一照明图像e1至第四照明图像e4,然后将各个图像按照所设定的行(row)或列(column)区域进行分割。
128.此外,通过对齐模块320对第一照明图像e1的多个行(row)或列(column)的部分图像d1~d4以及第二照明图像e2的多个行(row)或列(column)的部分图像d1~d4进行对齐。此外,通过直方图模块330分隔成相同大小的区块并在为区块分配位置编号之后提取出区块的反射度值。此外,通过去除模块340对所设定的基准反射度值以及从区块中测定到的反射度值进行对比而删除具有与基准反射度值相比更大的反射度值的区块。此外,通过区块补正图像模块350以及去除模块340利用其他有效图像对与所去除的部分对应的区块进行
插值而生成各个第一区块补正图像g1以及第二区块补正图像g2。
129.作为一实例,在第二照明图像的第一区块hu2的反射度值大于基准反射度值时,将第一区块hu2的反射度值变更为0。此外,将第一照明图像的第一区块hu1的反射度值和第三照明图像的第一区块hu3的反射度值以及第四照明图像的第一区块hu4的反射度值的平均值反映到第二照明图像的第一区块hu2中。
130.此外,在第三照明图像的第二区块hd3的射度值大于基准反射度值时,将第二区块hd2的反射度值变更为0。此外,将第一照明图像的第二区块hd2的反射度值和第二照明图像的第二区块hd2的反射度值以及第四照明图像的第二区块hd4的反射度值的平均值反映到第三照明图像的第二区块hd3中。
131.此外,通过合成图像生成模块360对第一区块补正图像g1以及第二区块补正图像g2进行合成,从而生成合成图像h。
132.此外,控制器部30除了如上所述的特征之外,还可以通过利用计算机构成而自由地调整多个照明模块的点亮顺序,而且可以将第一照明模块至第四照明模块通过脉冲宽度调制(pwm,pulse width modulation)方式对各个照明模块的亮度进行调整。此外,因为根据被检查物体的特征而在不同照明角度下的照明的亮度可能有所不同,因此可以通过对照射到被检查物体a的照明值进行管理而获得标准化的检查结果。
133.接下来,将参阅图8至图14对行扫描用非郎伯表面检查系统的工作进行详细的说明。
134.图8是与适用本发明之一实施例的行扫描用非郎伯表面检查系统的工作相关的顺序图,图9至图13是对在适用本发明之一实施例的行扫描用非郎伯表面检查系统的工作过程以及工作过程中所呈现出的图像进行图示的示意图。此外,图14是对多个区块补正图像进行图示的示意图。
135.控制器部30如图8所示,通过按照一系列的顺序工作而生成加工图像即反射率图像h1、向x方向偏微分的图像h2、向y方向偏微分的图像h3、2次偏微分的图像h4以及垂直向量图像(norm image)。
136.具体来讲,控制器部30如图9所示,在被检查物体a进入到表面检查部10时依次驱动多个照明模块工作,从而通过摄像头部20生成多个照明图像。此时,第一照明模块121至第四照明模块124如图10所示,在不同的方向上向被检查物体a照射光线。控制器部30可以根据第一照明模块121至第四照明模块124的工作对整体图像c进行接收。此外,可以从所接收到的整体合成图像c提取出多个行(row)或列(column)的部分图像d1~d4,并通过对所提取出的各个部分图像进行对齐而生成第一照明图像e1至第四照明图像e4。
137.控制器部30按照如图13所示的方式分割成多个区块并从所分割的区块提取出反射度值,然后对所提取出的区块的反射度值与预先设定的基准反射度值进行比较。其中,控制器部30的直方图模块330将第一照明图像e1至第四照明图像e4分割成区块f并为区块f分配位置编号,然后从各个区块提取出反射度值。此外,可以形成与反射度值对应的曲线图。
138.此外,在直方图模块330中生成的区块f可以是像素,且可以在0~255的范围内提取出包含于各个区块中的反射度值。
139.此外,直方图模块330可以以所图示的记号为基础利用如下所述的公式提取出反射度值。此时,向各个照明模块12的单位向量为l=(cosτ
·
sinσ,sinσ
·
sinτ,cosσ)。此外,
被检查物体a表面的点(x,y)的法线单位向量为此外,在被检查物体表面的点(x,y)上沿着轴和轴对表面分别进行偏微分而获得
140.其中,σ为照明的斜射(slant)角度,τ为照明的倾斜(tilt)角度。ρ为表面的常数。此外,λ为照明的强度。在影像的坐标中,影像的强度(intensity)可以是
141.此时,控制器部30的去除模块340包括基准反射度值,从而对从各个区块f测定到的反射度值与基准反射度值进行比较。此外,去除模块340对反射度值大于基准反射度值的区块f进行删除。作为一实例,去除模块340作为基准反射度值包括与254对应的反射度值,并对反射度值大于基准反射度值的区块f进行删除。
142.如上所述,控制器部30在区块的反射度值不足基准反射度值时对区块进行保留,而在区块的反射度值为基准反射度值以上时对区块进行删除,在删除超出基准反射度值的区块之后通过插值法将与所删除的区块的位置对应的区块以及从其他照明图像提取出的区块进行合并。或者,在区块的反射度值为基准反射度值以上时对区块进行删除,在删除超出基准反射度值的区块之后将从其他照明图像提取出的区块映射到与所删除的区块的位置对应的区块上。
143.此外,控制器部30利用插值法对一部分区块进行补正,从而再次生成为第一区块补正图像g1、第二区块补正图像g2、第三区块补正图像g3以及第四区块补正图像g4。
144.其中,第一区块补正图像g1如图14中的(a)所示,可以是在利用从第一照明模块121照射出的光线进行拍摄的图像或进行拍摄之后对一部分区块进行补正的图像。此外,第二区块补正图像g2如图14中的(b)所示,可以是在利用从第二照明模块122照射出的光线进行拍摄的图像或进行拍摄之后对一部分区块进行补正的图像。此外,第三区块补正图像g3如图14中的(b)所示,可以是在利用从第三照明模块123照射出的光线进行拍摄的图像或进行拍摄之后对一部分区块进行补正的图像。此外,第四区块补正图像g4如图14中的(b)所示,可以是在利用从第四照明模块124照射出的光线进行拍摄的图像或进行拍摄之后对一部分区块进行补正的图像。
145.此外,合成图像生成模块360可以加工成反射率图像h1,或通过从合成图像h中沿着x轴方向计算出所述被检查物体的表面高度的变化量而加工成x轴偏微分图像h2,或加工成通过沿着y轴方向计算出被检查物体的表面高度的变化量的y轴偏微分图像h3,或加工成将x轴偏微分图像以及y轴偏微分图像沿着x轴方向以及y轴方向计算出被检查物体的表面高度的变化量的2次偏微分图像h4。
146.具体来讲,合成图像生成模块360可以从合成图像中通过如下所述的公式求出反射率图像h1。
[0147][0148]
此时,可以是去除在对象物体表面受到照明时发生面反射的亮度之外的由散射光线引起的亮度。
[0149]
此外,合成图像生成模块360可以通过沿着x轴方向计算出对象物体的表面高度的变化量的公式即公式按照如图2所示的方式求出可以明显地呈现出x轴方向上的对象物体表面高度的变化特征的向x轴方向偏微分的图像h2。
[0150]
此外,可以通过沿着y轴方向计算出对象物体的表面高度的变化量的公式即公式按照如图2所示的方式求出可以明显地呈现出y轴方向上的对象物体表面高度的变化特征的向y轴方向偏微分的图像h3。此外,合成图像生成模块可以通过从所获取到的影像计算出对象物体的表面高度的变化量的公式即公式按照如图2所示的方式求出可以明显地呈现出对象物体的表面高度的曲率特性的曲率图像。
[0151]
此外,合成图像生成模块360可以通过从合成图像h计算出与表面垂直方向的值的公式即公式按照如图2所示的方式求出将垂直于表面接收到的光线转换成图像的垂直向量(norm)图像。
[0152]
此外,控制器部30可以将从图7中所图示的光源方向(1)~(n)号中通过全反射而直接入射到摄像头部20的照明以3个或3个以上的组合进行实时测定并在合成图像时进行排除,从而提升整体图像品质。
[0153]
行扫描用非郎伯表面检查系统1可以生成反射率图像h1、x轴方向偏微分图像h2、y轴方向偏微分图像h3、对垂直向量(norm)图像以及曲率图像进行2次微分的2次偏微分图像h4以及检查图像,从而准确地对被检查物体的不规则的表面以及非郎伯表面进行检查。
[0154]
图15是对在框架模块中安装透光板的形态进行图示的斜视图,图16是对在框架模块中安装透光板以及反射板的状态进行图示的斜视图,图17是对通过透光板放射出散射光线的形态进行图示的正面图以及侧面图,图18是对透光板进行图示的平面图。
[0155]
参阅图15至图18,行扫描用非郎伯表面检查系统1的框架模块110,还包括透光板114以及辅助照明模块125。
[0156]
透光板114安装在拍摄孔112中,在上侧面形成有用于将光线反射到下部方向的光点图形(dot pattern)。
[0157]
辅助照明模块125在透光板114的侧面安装有多个,用于向所述透光板114的内部照射光线。
[0158]
其中,通过控制器部20对辅助照明模块125的亮度进行调节。
[0159]
如上所述的结构与现有的通过圆顶(dome)形态的框架模块110间接以及手动地利用散射光线的方法相比可以更加有效地减小其大小,而且可以单独地直接控制散射光线的强度(照度),因此可以更加有效地对表面检查影像中的噪声进行控制。
[0160]
表面检查图像中的噪声,包括在摄像头传感器在低照度条件下生成的暗电流噪声(dark current noise)以及因为产品表面的微细的不均匀特性而导致的散粒噪声(shotnoise)。
[0161]
在产品表面的反射光线过少的情况下会导致整体影像变暗,而因为传感器的低照度灵敏度较弱而生成的暗电流造成需要一定量度以上的垂直方向的成分的光线。
[0162]
可以通过平行散射光线补充垂直方向上的光线而减少暗电流噪声。
[0163]
此外,在产品的表面因为微细的研磨状态或微细缺陷(1~2μm以内)而呈现出较大的散射光线差异时,会成为导致难以检测出实际需要检查的表面不良(10μm以上的戳痕、划痕)的散粒噪声,而如上所述的散粒噪声可以通过平行散射光线照明得到衰减,从而呈现出去除噪声之后的影像。
[0164]
借此,本发明可以在获取反射率图像时利用主动散射光线对噪声进行去除,且可以对单独分离的主动散射光线进行调整,因此对曲率(曲率半径/微分)图像的影像较小。
[0165]
借此,可以获得优秀的表面检查影像。
[0166]
通过米氏散射(mie scattering)理论,光线的散射是在光线照射到一定大小以下的不规则的表面时发生光线的散射,而在颗粒与光线的波长类似或达到一定大小以下时会发生米氏散射。
[0167]
所散射的光线的强度取决于光线的入射角度。
[0168]
为了对检查对象的表面粗糙度进行准确的计算,可以利用麦斯威尔方程式进行计算。
[0169]
在入射光线在检查对象的表面发生散射时,颗粒的密度m与散射光线的亮度满足下述公式。
[0170][0171]
其中,γ为摄像头与检查对象之间的距离,ρ为表面的小颗粒的密度,lk为散射的波长k的亮度,i
k0
为波长k的入射光线的亮度,λk为入射光线的波长k,s为检查对象的表面积。
[0172]
此外,l
k1
以及l
k2
为散射光线的垂直以及水平偏光成分,这是与对象物体的折射率n、散射角度θ相关的函数。
[0173]
α(di)为检查对象的表面颗粒分布函数,m为不同的分布函数的数量。
[0174]
表面颗粒的集中度与散射光线的亮度具有线性关系。
[0175]
本发明被设计成在所述公式的基础上对与摄像头之间的距离以及辅助照明模块的亮度进行适当调整,从而使得因为检查对象的固有的表面粗糙度而散射的光线的亮度与因为表面不良而导致的亮度的差异最大化。
[0176]
当检查对象物体的表面因为焊接而受到了污染但并不属于不良,或因为表面的屈曲而在表面上呈现出污渍状态但没有划分为不良时,可能无法与发生在表面的划痕或戳痕等不良进行区分。
[0177]
在本发明中,可以在对辅助照明模块的亮度进行调节的同时获取图像并利用所述图像对如上所述的因为焊接而导致的污染或表面屈曲与不良进行区分检测。
[0178]
图19是对散射光线照明的适用与否相关的图像差异(a:没有散射光线照明,b:有散射光线照明)进行图示的例示图。
[0179]
图19中的(a)图像是在没有散射光线系统的情况下拍摄的图像,而(b)图像是利用散射光线进行合成的结果。
[0180]
在图19所示的图像中,较亮的部分为划痕或戳痕不良,而较暗的部分为检查对象物体的表面。
[0181]
(a)图像以及(b)图像几乎没有亮度变化,但是随着辅助照明模块的照明变亮,对象物体表面的亮度也随之变亮。
[0182]
因此,提取出照明的亮度变化较少的部分作为不良(划痕或戳痕)。
[0183]
从原理上来讲,当检查对象物体的表面颗粒的大小d在米氏散射(mie scattering)范围之内时,检查对象物体的表面亮度与辅助照明模块的亮度之间存在线性关系,但是在颗粒的大小d大于米氏散射(mie scattering)范围时(例如划痕或戳痕等不良),几乎与辅助照明模块的亮度没有关系。
[0184]
图20是对检测划痕以及戳痕的过程进行图示的例示图。
[0185]
参阅图20,作为漫反射模块(diffuse module)的亮度,在从强度0(intensity 0)获取图像0(image 0)并从强度n(intensity n)获取图像n(image n)之后,计算出图像0(image 0)与图像n(image n)之间的差异并通过所述图像检测出划痕(scratch)以及戳痕。
[0186]
图21是与散射光线与否相关的曲线(a:噪声严重,b:已去除噪声)。
[0187]
图21中的绿色线条为相应图像的轮廓。
[0188]
通过图21中的(b)图像的轮廓可以得知,标准偏差值从原来的20降低到15。
[0189]
图22是与散射光线与否相关的表面直方图分布图(a:因为平滑化而造成较高的偏差,b:因为平滑化较低而造成偏差较低)。
[0190]
通过绿色区域的直方图可以得知,可以利用散射光线大幅减少基底噪声信息,从而使得标准偏差值从原来的23降低到15。
[0191]
在上述内容中参阅附图对本发明的实施例进行了说明,但是具有本发明所属技术领域之一般知识的人员应该可以理解,本发明可以在不对其技术或必要特征进行变更的情况下以其他具体形态实施。因此,在上述内容中记述的实施例在所有方面仅为示例性目的而非限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。