1.本发明涉及灯光敷网渔船船舶数据应用技术领域,特别是涉及一种多因素混合判定西北太平洋灯光敷网船舶状态的方法。
背景技术:
2.渔船监测系统(vms,vessel monitoring system)能够提供渔船在海上的时间、位置、航速、航向等信息,具有数据量大、精度高等特点,通过对船位数据的分析可以精准地监测我国渔船状态。由于拖网、刺网渔船作业特点相对比较简单,航速、航向变化明显,因此目前国内外已有的研究主要以拖网、刺网为主,主要集中在船位数据对拖网和刺网渔船的船位状态,但灯光敷网渔船状态尚未见相关报道。
3.灯光敷网在我国公海捕捞业中占有非常重要的地位,由于其作业特点相对比较复杂,主要为夜晚开灯诱集鱼群,航速变化较小,所以以往的研究方法并不适用于灯光敷网渔船船位数据的研究。
4.综上,需要一种方法来判断基于高时间分辨率和灯光敷网作业特点的渔船状态(避浪、漂流、捕捞和航行)。
技术实现要素:
5.为了克服现有技术不足,本发明提供了一种多因素混合判定西北太平洋灯光敷网船舶状态的方法。
6.本发明解决其技术问题所采用的技术方案是:
7.一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,对各船位点的状态通过vms数据(速度、航向差)、作业特点(西北太平洋当地时间)和海洋环境(海浪)组合进行判断,判断公式:
[0008][0009]
在满足海浪前提条件下,船速、航向差和时间(小时)处于阈值范围之内,船舶处于捕捞状态。式中,p为渔船状态,其状态1为避浪(0.1节≤v≤8.8节、-359
°
≤d≤359
°
、0:00≤t≤24:00、w≥3m);2为漂流(0.1节≤v≤1.6节、5:00≤t≤19:00、-359
°
≤d≤359
°
、w《3m);3为捕捞(0.1节≤v≤2节、0:00≤t≤5:00和19:00≤t≤24:00、-359
°
≤d≤359
°
、w《3m),4为航行(v≥2节、-359
°
≤d≤359
°
、0:00≤t≤24:00、w《3m)。其中v为瞬时船速,d为瞬时航向差,t为时间(小时),w为瞬时海浪;v
min
为设定的最小航速值,v
max
为设定的最大航速,d
min
为作业状态航向差最小值-359
°
,d
max
为作业状态航向差最大值359
°
,t
min
为西北太平洋当地时间0时,t
max
为西北太平洋当地时间24时,w
min
为船舶需要避浪的海浪最小值。其中采用单位时间等态法,在较短单位时间内,点a前后相同较短单位时间内,存在较多的某船位状态点
的数量,则认为:
[0010][0011]
其中,p
front
为比点a时间早的状态,p
back
为比点a时间晚的状态。本步骤通过多因素混合判定和单位时间等态法,精准分析灯光敷网渔船作业状态,使得判别更加科学合理,符合实际生产情况。
[0012]
作为本技术的优先实施例,所述点a附近的状态根据p
front
=x(p1,p2,p3···
p
a-1
)p
back
=x(p
a 1
,p
a 2
,p
a 3
···
pn)确定;其中,点a状态为pa,比点a时间早的状态p
front
由状态(p1,p2,p3···
p
a-1
)中距离点p时间间隔最短、状态最多的值确定,比点a时间晚的状态p
back
由状态(p
a 1
,p
a 2
,p
a 3
···
pn)中距离点a时间间隔最短、状态最多的值确定。本步骤有利于准确判别相邻状态的分割点,减少误差。
[0013]
作为本技术的优先实施例,所述船舶需要避浪的海浪最小值根据多艘北太平洋灯光敷网避浪的海浪最小值分析获得。
[0014]
作为本技术的优先实施例,所述船舶需要避浪的海浪最小值为3m。本步骤有利于科学合理区分避浪状态与其他三种状态的区别。
[0015]
作为本技术的优先实施例,所述航速最小值和最大值根据灯光敷网24小时航向航速图和多艘船的全年统计数据分析获得。
[0016]
作为本技术的优先实施例,在捕捞季节期间,去除船速为0或未检出的点,即在捕捞季节内,船速最小值为0.1节,船速最大值为8.8节。本步骤通过对历史数据分析,去除误差点,有利减少误差和数据处理产生错误的可能。
[0017]
有益效果:
[0018]
本发明中各船位点状态通过vms数据(速度、航向差)、作业特点(西北太平洋当地时间)和海洋环境(海浪)组合进行判断,使其能够基于船舶数据并结合海洋环境和灯光敷网船作业特点提取西北太平洋灯光敷网作业状态。精确分析灯光敷网捕捞时间,为后期渔场预测和资源评估提供合理建议。
附图说明
[0019]
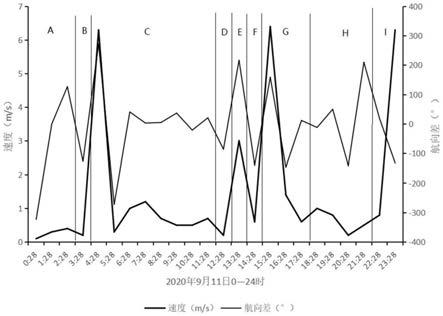
图1是福远渔675在2020年9月11日0—24时航速航向分布图。
[0020]
图2是2020年船位点数量百分比随速度变化图。
[0021]
图3是北太平洋灯光敷网船福远渔675采用多因素混合状态划分和状态修正后的状态图。
[0022]
图4是北太平洋灯光敷网船福远渔675避浪状态下浪高变化示意图。
具体实施方式
[0023]
下面结合附图对本发明的实施例作详细说明:本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0024]
本发明的实施方案涉及一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,各船位点的状态通过通过vms数据(速度、航向差)、作业特点(西北太平洋当地时间)和海洋环境(海浪)组合进行判断,通过式(1)判断,在满足海浪前提条件下,船速、航向差和时间(小时)处于阈值范围之内,处于捕捞作业状态。
[0025][0026]
式(1)中,p为船位点的状态,其状态1为避浪,2为漂流,3为捕捞,4为航行。
[0027]
灯光敷网生产具有较为强烈的季节性,生产作业时预先将船尾部网具敷设在水中,然后通过集鱼灯把趋光性鱼类诱集成群,等待捕捞对象进入网内,然后通过绞机等收网捞取渔获物。所以判定其捕捞状态时,要结合时间(小时)。结合其历史渔捞日志和相关文献,因其作业多为当地时间晚上19:00至次日凌晨5:00,为了便于划分其状态,故以一天作为讨论区间,将时间(小时)最大值设定为西北太平洋当地时间24时,最小值设定为西北太平洋当地时间0时,便于区分其状态。
[0028]
灯光敷网的航向是指在水平面上以渔船位置为中心,从该点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,航向值在0~360
°
之间。为了进一步分析航向的实际变化状况,对航向角度进行了差值计算获得航向差,航向差是两个相邻时间,后一时间航向与前一时间航向的差值,正值反应航向顺时针转动,负数反应渔船航向逆时针转动。远渔平台实际收到的vms数据时间间隔较长,航向变化较大。
[0029]
通过对多艘船全年统计数据,在捕捞季节期间,去除船速为0或未检出的点,即船速与海流流速相等等未检测出实际船速的点。其次在作业期内,船速最小值设定为航速最小值,船速最大值设定为航速最大值。
[0030]
采用单位时间等态法,在较短单位时间内,点p前后相同较短单位时间内,存在较多的某船位状态,则认为
[0031][0032]
其中,点a状态为pa,p
front
为比点a时间早的状态,p
back
为比点a时间晚的状态。比点a时间早的状态p
front
由状态(p1,p2,p3···
p
a-1
)中距离点a时间间隔最短、状态最多的值确定,比点a时间晚的状态p
back
由状态(p
a 1
,p
a 2
,p
a 3
···
pn)中距离点a时间间隔最短、状态最多的值确定。
[0033]
上述公式(1)的推导过程如下:
[0034]
(1)如若在生产捕捞季节船舶数据符合0.1节≤v≤8.8节,-359
°
≤d≤359
°
,则可进行四种状态判别。
[0035]
(2)根据文献、一线船长调研和船舶数据等资料,结合船位数据,确定各状态各因素阀值。
[0036]
(3)根据文献、一线船长调研和船舶数据等资料,确定避浪状态发生的海浪最小值
为3m,用以区分避浪和其它3种状态。
[0037]
(4)基于海浪≤3m前提条件,通过船舶速度和船舶航向差,区分航行与漂流、捕捞状态区别,如若v≥2节,则为航行状态。
[0038]
(5)基于海浪≤3m和v≥2节前提条件,通过灯光敷网作业时间当地时间晚上19:00至次日凌晨5:00,区分捕捞和漂流两种状态。
[0039]
下面以一个具体的实施例子来进一步说明本发明。
[0040]
1.确定t
min
和t
max
[0041]
灯光敷网生产具有较为强烈的季节性,生产作业时预先将船尾部网具敷设在水中,然后通过集鱼灯把趋光性鱼类诱集成群,等待捕捞对象进入网内,然后通过绞机等收网捞取渔获物。根据2020年北太平洋灯光敷网船渔捞日志记录和历史相关文献,因其作业多为当地时间晚上19:00至次日凌晨5:00,故为了便于划分其状态,故以一天作为讨论区间,北太敷网设定t
min
和t
max
分别为西北太平洋当地时间0时和西北太平洋当地时间24时,便于区分其状态。
[0042]
2.确定d
min
和d
max
[0043]
2020年9月11日北太平洋某敷网船,mmsi:412440368(以下成福远渔675)进行分析,在0—24时根据速度划分为8段,如图1所示,灯光敷网捕捞(a段和h段),航行(b段、d段、f段和i段)及漂流(c段、e段和g段),即3个状态。灯光敷网生产具有较为强烈的季节性,生产作业时预先将船尾部网具敷设在水中,然后通过集鱼灯把趋光性鱼类诱集成群,等待捕捞对象进入网内,然后通过绞机等收网捞取渔获物,作业时间集中在当地时间晚上19:00至次日凌晨6:00,作业时以漂流为主。
[0044]
灯光敷网的航向是指在水平面上以渔船位置为中心,从该点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,航向值在0~360
°
之间。为了进一步分析航向的实际变化状况,对航向角度进行了差值计算获得航向差,航向差是两个相邻时间,后一时间航向与前一时间航向的差值,正值反应航向顺时针转动,负数反应渔船航向逆时针转动。远渔平台实际收到的vms数据时间间隔较长,航向变化较大,参考图1和多艘船数据的统计,设定作业状态航向差d
max
和d
min
分别为359
°
和-359
°
。
[0045]
3.确定v
min
和v
max
[0046]
记录2020年捕捞季节期间船位点数量随速度的变化,图2是对捕捞季节期间灯光敷网渔船福远渔675、福远渔676和福远渔678点速度(来源于vms数据)占全部船位百分比记录进行统计。由于实际接受到的vms数据时间间隔较长,部分数据因为与当地流速相同,所以产生值为0节和null数据,在渔船状态判别中,该部分数据无法作为设定v
min
和v
max
的值,故舍去。
[0047]
灯光敷网渔船作业时以漂流为主,捕捞作业速度为0.1~2节,漂流速度小于1.6节,从图示也可以看出,灯光敷网船数据主要集中在0~2节,故设定在捕捞季节期间,去除船速为0或未检出的点,在作业期内,所述船速最小值0.1节的为航速最小值,所述船速最大值8.8节的为航速最大值。
[0048]
4.确定w
min
[0049]
北太敷网船在海浪一定值范围内可以正常作业,超过该范围需要避浪,根据2020年和2021年北太平洋灯光敷网船渔捞日志记录和历史相关文献,选取福远渔675等多艘船
未有产量的日期,并根据船位数据,判断是否发生一定距离空间距离移动,最终确定w
min
为3m,图4为福远渔675避浪状态开始和结束浪高变化示意图。
[0050]
5.北太灯光敷网船状态修正
[0051]
采用单位时间等态法,在较短单位时间内,点p前后相同较短单位时间内,存在较多的某船位状态,则认为
[0052][0053]
其中,点a状态为pa,p
front
为比点a时间早的状态,p
back
为比点a时间晚的状态。比点a时间早的状态p
front
由状态(p1,p2,p3···
p
a-1
)中距离点a时间间隔最短、状态最多的值确定,比点a时间晚的状态p
back
由状态(p
a 1
,p
a 2
,p
a 3
···
pn)中距离点a时间间隔最短、状态最多的值确定。
[0054]
本方法能更好的划分相邻两状态的中间点,判断避浪、漂流、捕捞和航行四个状态的起止点,进而实现更为精确地渔船状态划分,图3是北太平洋灯光敷网船福远渔675采用多因素混合状态划分和状态修正后的状态图。
[0055]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。