技术特征:
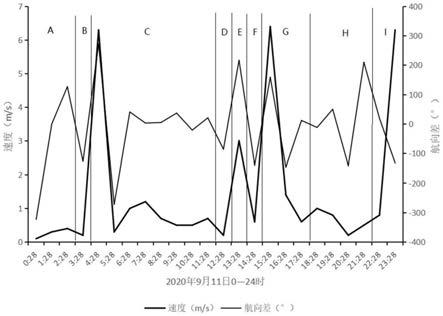
1.一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,其特征在于,对各船位点的状态通过vms数据(速度、航向差)、作业特点(西北太平洋当地时间)和海洋环境(海浪)组合进行判断,判断公式:在满足海浪前提条件下,船速、航向差和时间(小时)处于阈值范围之内,船舶处于捕捞状态,式中,p为渔船状态,其状态1为避浪(0.1节≤v≤8.8节、-359
°
≤d≤359
°
、0:00≤t≤24:00、w≥3m);2为漂流(0.1节≤v≤1.6节、5:00≤t≤19:00、-359
°
≤d≤359
°
、w<3m);3为捕捞(0.1节≤v≤2节、0:00≤t≤5:00和19:00≤t≤24:00、-359
°
≤d≤359
°
、w<3m),4为航行(v≥2节、-359
°
≤d≤359
°
、0:00≤t≤24:00、w<3m),其中,v为瞬时船速,d为瞬时航向差,t为时间(小时),w为瞬时海浪;v
min
为设定的最小航速值,v
max
为设定的最大航速,d
min
为作业状态航向差最小值-359
°
,d
max
为作业状态航向差最大值359
°
,t
min
为西北太平洋当地时间0时,t
max
为西北太平洋当地时间24时,w
min
为船舶需要避浪的海浪最小值,其中采用单位时间等态法,在较短单位时间内,点a前后相同较短单位时间内,存在较多的某船位状态点的数量,则认为:其中,p
front
为比点a时间早的状态,p
back
为比点a时间晚的状态。2.根据权利要求1所述的一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,其特征在于,所述点a附近的状态根据p
front
=x(p1,p2,p3…
p
a-1
)p
back
=x(p
a 1
,p
a 2
,p
a 3
…
p
n
)确定;其中,点a状态为p
a
,比点a时间早的状态p
front
由状态(p1,p2,p3…
p
a-1
)中距离点p时间间隔最短、状态最多的值确定,比点a时间晚的状态p
back
由状态(p
a 1
,p
a 2
,p
a 3
…
p
n
)中距离点a时间间隔最短、状态最多的值确定。3.根据权利要求1所述的一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,其特征在于,船舶需要避浪的海浪最小值根据多艘北太平洋灯光敷网避浪的海浪最小值分析获得。4.根据权利要求1所述的一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,其特征在于,船舶需要避浪的海浪最小值为3m。5.根据权利要求1所述的一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,其特征在于,航速最小值和最大值根据灯光敷网24小时航向航速图和多艘船的全年统计数据分析获得。6.根据权利要求1所述的一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,其特征在于,在捕捞季节期间,去除船速为0或未检出的点,即在捕捞季节内,船速最小值为0.1节,船速最大值为8.8节。
技术总结
本发明公开了一种多因素混合判定西北太平洋灯光敷网船舶状态的方法,其特征在于,对各船位点的状态通过VMS数据(速度、航向差)、作业特点(西北太平洋当地时间)和海洋环境(海浪)组合进行判断,其中,v为瞬时船速,d为瞬时航向差,t为时间(小时),w为瞬时海浪;V
技术研发人员:张衡 韩海斌 方舟 杨超 商宸 刘思源
受保护的技术使用者:上海海洋大学
技术研发日:2021.12.09
技术公布日:2022/4/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。