1.本实用新型涉及无人机技术领域,尤其涉及一种基于电机反馈的无人机油门杆。
背景技术:
2.目前大型的无人机驾驶都是在专门的控制室对无人机进行远程操控,模拟出真实的驾驶机舱,通过油门杆实现对无人机的控制。现有大型无人机油门杆基本上都是手动油门杆,手动油门杆存在当无人机自动飞行状态时,地面油门杆物理位置数据和飞机实际油门数据不同步,切换为手动飞行比较麻烦。其次手动油门杆主副驾驶位置数据也不同步,操作员反复切换操作的工作强度也相对更大。
技术实现要素:
3.本实用新型为了解决上述技术问题提供一种基于电机反馈的无人机油门杆。
4.为达到上述目的,本实用新型采用的技术方案如下:
5.一种基于电机反馈的无人机油门杆,包括支座、手杆、电机、主齿轮和随动副齿轮,所述支座内水平设有贯穿支座两侧的主轴,所述手杆下端通过支座上方的油门杆滑道与主轴同步连接,所述主轴上嵌套有随动齿轮,所述电机设于支座内部,所述主齿轮套于电机转轴上并与随动齿轮啮合连接,所述随动副齿轮上装配有角位移传感器并与随动齿轮啮合连接。
6.进一步的,还包括计算机和电机驱动器,所述计算机和电机驱动器设于支座内部。
7.进一步的,所述电机驱动器分别与计算机和电机电连接。
8.进一步的,所述主齿轮和随动副齿轮分别位于随动齿轮的左侧和右侧。
9.进一步的,所述支座左端面上通过螺钉固定安装有航插。
10.与现有技术相比,本实用新型具有以下有益效果:
11.1、本实用新型可实现实时匹配无人机飞行过程中的位置;
12.2、本实用新型便于主副驾驶位置在只有单人操作的情况下油门杆同步;
13.3、本实用新型可大大减少操作员的工作量,自动化程度更高。
附图说明
14.图1是本实用新型的结构示意图;
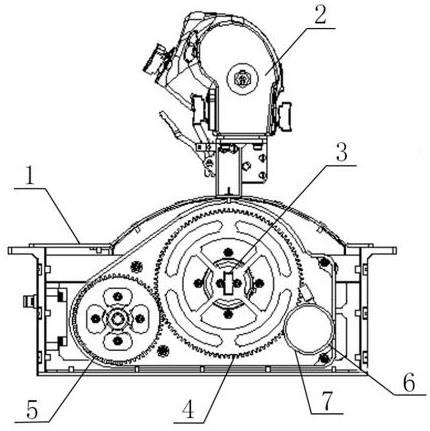
15.图2是本实用新型的三维局部透视图;
16.图3是本实用新型的左视图;
17.图4是本实用新型的俯视图;
18.附图标识:1-支座、2-手杆、3-主轴、4-随动齿轮、5-主齿轮、6-随动副齿轮、7-角位移传感器、8-电机、9-航插。
具体实施方式
19.为使本实用新型的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本实用新型作进一步的详细说明,本实用新型的示意性实施方式及其说明仅用于解释本实用新型,并不作为对本实用新型的限定。
20.如图1、2、3、4所示,本实用新型公开的一种基于电机反馈的无人机油门杆,包括支座1、手杆2、电机8、主齿轮5和随动副齿轮6,支座1内水平设有贯穿支座1两侧的主轴3,手杆2下端通过支座1上方的油门杆滑道与主轴3同步连接,主轴3上嵌套有随动齿轮4,电机8设于支座1内部,主齿轮5套于电机8转轴上并与随动齿轮4啮合连接,随动副齿轮6上装配有角位移传感器7并与随动齿轮4啮合连接。
21.还包括计算机和电机驱动器,计算机和电机驱动器设于支座1内部。
22.电机驱动器分别与计算机和电机8电连接。
23.主齿轮5和随动副齿轮6分别位于随动齿轮4的左侧和右侧。
24.支座1左端面上通过螺钉固定安装有航插9,航插9主要用于将电源或信号连接起来,特别是针对芯数较多的线束。
25.本实施例的具体实施原理流程如下:
26.接通电源,计算机将指令发送给电机驱动器,电机驱动器发出脉冲指令控制电机正转或反转。电机转轴带动主齿轮转动,根据齿轮传动原理,随动齿轮转动时再带动随动副齿轮转动。角位移传感器将产生的位移量信号反馈给计算机,计算机通过齿轮传动比计算出手杆的角位移量,并持续给电机发送调整指令,直至达到手杆的角位移需求量为止。
27.当然,本实用新型还可有其它多种实施方式,在不背离本实用新型精神及其实质的情况下,熟悉本领域的技术人员可根据本实用新型作出各种相应的改变和变形,但这些相应的改变和变形都应属于本实用新型所附的权利要求的保护范围。
技术特征:
1.一种基于电机反馈的无人机油门杆,其特征在于:包括支座、手杆、电机、主齿轮和随动副齿轮,所述支座内水平设有贯穿支座两侧的主轴,所述手杆下端通过支座上方的油门杆滑道与主轴同步连接,所述主轴上嵌套有随动齿轮,所述电机设于支座内部,所述主齿轮套于电机转轴上并与随动齿轮啮合连接,所述随动副齿轮上装配有角位移传感器并与随动齿轮啮合连接。2.根据权利要求1所述的一种基于电机反馈的无人机油门杆,其特征在于:还包括计算机和电机驱动器,所述计算机和电机驱动器设于支座内部。3.根据权利要求2所述的一种基于电机反馈的无人机油门杆,其特征在于:所述电机驱动器分别与计算机和电机电连接。4.根据权利要求1所述的一种基于电机反馈的无人机油门杆,其特征在于:所述主齿轮和随动副齿轮分别位于随动齿轮的左侧和右侧。5.根据权利要求1所述的一种基于电机反馈的无人机油门杆,其特征在于:所述支座左端面上通过螺钉固定安装有航插。
技术总结
本实用新型涉及一种基于电机反馈的无人机油门杆,它包括支座、手杆、电机、主齿轮和随动副齿轮,所述支座内水平设有贯穿支座两侧的主轴,所述手杆下端通过支座上方的油门杆滑道与主轴同步连接,所述主轴上嵌套有随动齿轮,所述电机设于支座内部,所述主齿轮套于电机转轴上并与随动齿轮啮合连接,所述随动副齿轮上装配有角位移传感器并与随动齿轮啮合连接。本实用新型可实现实时匹配无人机飞行过程中的位置;本实用新型便于主副驾驶位置在只有单人操作的情况下油门杆同步;本实用新型可大大减少操作员的工作量,自动化程度更高。自动化程度更高。自动化程度更高。
技术研发人员:颜伟 黄作勤
受保护的技术使用者:成都曙东科技有限责任公司
技术研发日:2021.11.12
技术公布日:2022/4/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。