1.本发明涉及堤防整治护坡领域,尤其是涉及一种预制混凝土锁块机械衬砌护坡及其施工方法。
背景技术:
2.在水利工程日常应用的过程中,受到波浪冲刷与雨水侵蚀作用的影响,传统的生态护坡方式不能够有效地发挥作用。基于此,混凝土砌块护坡技术的合理运用具有一定的现实意义。目前,在航道、堤防整治上,砌块护坡运用相对广泛。
3.然而,目前的砌块护坡施工多采用人工铺筑预制混凝土砌块,自动化程度较低,导致铺筑效率低。此外,由于预制混凝土砌块较重,需要多人合力搬抬,并且施工过程容易导致作业人员疲劳。
技术实现要素:
4.为了目前采用人工铺筑预制混凝土砌块自动化程度低、效率较低、作业人员容易疲劳的现象,本发明提供预制混凝土锁块机械衬砌护坡及其施工方法。
5.本技术的目的一在于提供的一种预制混凝土锁块机械衬砌设备,采用如下的技术方案:一种预制混凝土锁块机械衬砌设备,包括设置于坡面的机架,所述机架上设置有用于输送预制混凝土锁块的输送带,所述机架上设置有横跨机架的行走架,所述行走架能够相对所述机架沿所述输送带的输送方向来回滑动,所述行走架上设置有用于抓取并转移预制混凝土锁块的抓取转运装置,所述抓取转运装置位于所述输送带的上方;所述机架上设置有用于驱动所述行走架沿所述输送带的输送方向来回滑动的驱动装置,所述机架的底部设置有用于驱动所述机架沿垂直于所述输送带的输送方向横向移动的履带式行走装置;所述抓取转运装置包括滑移连接于所述行走架的滑移座、转动连接于所述滑移座的安装座以及可升降地连接于所述安装座的夹爪,所述夹爪的抓取端与所述预制混凝土锁块的勾持部相勾持配合,所述行走架上设置有用于驱动所述滑移座沿所述机架的移动方向滑动的水平移动组件,所述安装座上设置有用于驱动所述夹爪升降的升降组件。
6.通过采用上述技术方案,铺筑预制混凝土锁块时,首先调整行走架的初始位置,使行走架的初始位置位于坡面的底部,从而自坡面的底部向顶部铺设预制混凝土锁块;通过吊车将预制混凝土锁块依次有序放置在输送带的上料端,且预制混凝土锁块放置在输送带的上料端的中间位置,通过输送带向前输送预制混凝土锁块。当预制混凝土锁块被运输到夹爪的正下方时,通过升降组件驱动夹爪下降,以令夹爪的抓取端勾持预制混凝土锁块的勾持部,并通过升降组件夹爪抓取预制混凝土锁块上升,然后通过水平移动组件驱动滑移座水平移动,以令夹爪夹持预制混凝土锁块移动至所需放置的位置上方,接着驱动夹爪下降从而松开预制混凝土锁块。接着通过驱动装置驱动行走架向输送带的上料端行走一个预
制混凝土锁块的长度距离,输送带同步配合输送预制混凝土锁块至夹爪的正下方,从而对下一个预制混凝土锁块进行抓取铺设,以此类推。当沿输送带的长度方向铺设完成一列预制混凝土锁块后,通过履带式行走装置驱动机架整体横向水平移动,从而铺设下一列预制混凝土锁块。相较于现有技术,本发明通过机械的作业方式从而铺设预制混凝土锁块,提高了铺设的自动化程度,且机械能够连续不断地进行铺设,有效提高了施工效率,减轻作业人员的劳动强度,降低作业疲劳度。
7.优选的,所述夹爪包括两根相互铰接的抓取杆,两根所述抓取杆交叉设置,两根所述抓取杆的一端均设置有抓取部,两根所述抓取杆的抓取部配合形成用于勾持预制混凝土锁块的勾持部的抓取端,两根所述抓取杆之间还设置有连接于所述升降组件的一端的收拉钢索,所述收拉钢索的两端分别连接于两根所述抓取杆远离抓取部的一端。
8.通过采用上述技术方案,夹取预制混凝土锁块时,通过驱动夹爪下降,以使夹爪的抓取端夹取预制混凝土锁块的勾持部,由于升降组件的一端连接于收拉钢索,使得当驱动夹爪上升时,收拉钢索拉动两根抓取杆远离抓取端的一端向相互靠近的方向移动,且夹爪抓取预制混凝土锁块抬升的过程中,利用预制混凝土锁块的重力作用,从而令夹爪的抓取端紧密夹紧预制混凝土锁块的勾持部,从而使得以使预制混凝土锁块被勾持地更稳定。
9.优选的,所述升降组件包括转动设置于所述安装座朝向所述输送带的一侧的收放轮、卷绕于所述收放轮的收卷钢索以及连接于所述收卷钢索的一端的升降杆,所述升降杆远离所述收卷钢索的一端设置有用于勾持所述收拉钢索的勾持端,所述安装座上设置有用于驱动所述收放轮收放卷的第一驱动电机,所述第一驱动电机的输出轴连接有减速箱,所述减速箱的输出轴连接于所述收放轮。
10.通过采用上述技术方案,当夹爪夹持预制混凝土锁块时,通过第一驱动电机驱动收放轮收放卷,从而带动升降杆升降,由此实现夹爪夹持预制混凝土锁块升降。
11.优选的,所述安装座的侧壁还设置有导套,所述导套套设于所述升降杆外,所述升降杆的勾持端凸出于所述导套的底端。
12.通过采用上述技术方案,导套对升降杆起到限位的作用,从而使得升降杆的升降更稳定。
13.优选的,所述水平移动组件包括设置于所述行走架上直线电机,所述直线电机的定子沿输送带的宽度方向设置,所述滑移座固定连接于所述直线电机的动子。
14.通过采用上述技术方案,由直线电机驱动滑移座水平滑动,从而使夹爪夹持预制混凝土锁块的水平移动更稳定。
15.优选的,所述滑移座背离直线电机的动子的一侧开设有凹槽,所述凹槽内转动设置有转轴,所述转轴沿所述输送带的输送方向设置,且所述转轴的两端穿出于所述滑移座的两侧,所述安装座上设置有连接于所述转轴的连接块;所述滑移座的侧壁还设置有用于驱动所述转轴转动的减速电机,所述减速电机的输出轴与所述转轴之间设置有一对相互啮合的蜗轮和蜗杆,所述蜗轮固定套设于所述转轴的一端,所述蜗杆转动承载于所述滑移座的侧壁,所述减速电机的输出轴连接于所述蜗杆的一端。
16.通过采用上述技术方案,由减速电机驱动安装座相对滑移座转动,从而调节安装座的角度,使得夹爪的角度可调,以便于调整预制混凝土锁块的放置角度;另外,利用蜗轮和蜗杆配合的自锁特性,使得安装座的角度固定后,不易相对滑移座转动,提高稳定性。
17.优选的,所述机架的两侧均设置有导轨,所述导轨沿所述输送带的输送方向设置,所述行走架的底部设置有滑移连接于所述导轨的行走轮;所述驱动装置包括设置于所述机架的一端的卷扬机,所述卷扬机的卷绕端卷绕有牵引钢索,所述牵引钢索的一端沿导轨的长度方向布设,且所述牵引钢索远离所述卷扬机的一端连接于所述行走架。
18.通过采用上述技术方案,卷扬机收卷牵引钢索时,通过牵引钢索牵引行走架沿机架向坡面的顶部移动,从而调节行走架的位置;而当卷扬机放卷牵引钢索,由于坡面具有斜度,使得机架具有斜度,从而令行走架在重力的分力作用下,沿着机架的延伸方向向坡面的底部滑动,滑动距离与牵引钢索的放卷长度相对应,从而控制行走机架的下降位置。
19.优选的,所述输送带上间隔设置有用于承载预制混凝土锁块的垫板,所述垫板沿输送带的宽度方向设置。
20.通过采用上述技术方案,在输送带上增设垫板,避免预制混凝土锁块直接接触输送带,减少对输送带的伤害。
21.本技术的目的二在于提供的一种机械衬砌护坡结构,采用如下的技术方案:一种机械衬砌护坡结构,采用上述任一项所述的机械衬砌设备铺筑预制混凝土锁块,所述护坡结构包括设置于坡面的镇脚、隔梗、铺设于所述坡面的碎石层以及铺筑于所述碎石层上的预制混凝土锁块,所述预制混凝土锁块沿坡面依次排列分布,且相邻的两排所述预制混凝土锁块相互扣接。
22.通过采用上述技术方案,相邻的两排预制混凝土锁块相互扣接,使得铺设后的预制混凝土锁块更稳定。
23.本技术的目的三在于提供的一种预制混凝土锁块机械衬砌护坡施工方法,采用如下的技术方案:一种预制混凝土锁块机械衬砌护坡施工方法,采用上述任一项所述的机械衬砌设备铺筑预制混凝土锁块,所述方法包括,s1、施工准备,建立测量控制网,放置修坡样架;s2、坡面修平、填筑、压实;s3、镇脚及隔梗浇筑;s4、摊铺土工布、碎石垫层;s5、通过所述预制混凝土锁块机械衬砌设备铺筑预制混凝土锁块;其中,铺筑预制混凝土锁块包括,s51、调整所述行走架的初始位置;s52、通过吊车将预制混凝土锁块整齐放置在输送带的上料端,且预制混凝土锁块放置在所述输送带的上料端的中间位置,通过所述输送带向前输送预制混凝土锁块;s53、当预制混凝土锁块被运输到所述夹爪的正下方时,通过所述第一驱动电机驱动收放轮放卷,使所述夹爪下降,以令夹爪的抓取端勾持预制混凝土锁块的勾持部,并通过所述第一驱动电机驱动收放轮收卷,从而使夹爪抓取预制混凝土锁块上升,然后通过所述直线电机驱动所述滑移座水平移动,以令预制混凝土锁块移动至所需放置的位置上方,接着驱动夹爪下降从而松开预制混凝土锁块;s54、通过所述卷扬机收卷牵引钢索以牵引所述行走架向输送带的上料端行走一个预制混凝土锁块的长度距离,输送带同步配合输送预制混凝土锁块至夹爪的正下方,从
而对下一个预制混凝土锁块进行抓取铺设,以此类推;s55、沿输送带的长度方向铺设完成一列预制混凝土锁块后,通过所述履带式行走装置驱动所述机架整体横向水平移动,从而铺设下一列预制混凝土锁块;s6、在铺设好的预制混凝土锁块浇筑混凝土。
24.综上所述,本技术包括以下至少一种有益技术效果:1.本技术通过机械的作业方式从而铺设预制混凝土锁块,提高了铺设的自动化程度,且机械能够连续不断地进行铺设,有效提高了施工效率,减轻作业人员的劳动强度,降低作业疲劳度;2.夹爪抓取预制混凝土锁块抬升的过程中,利用预制混凝土锁块的重力作用,从而令夹爪的抓取端紧密夹紧预制混凝土锁块的勾持部,从而使得以使预制混凝土锁块被勾持地更稳定。
附图说明
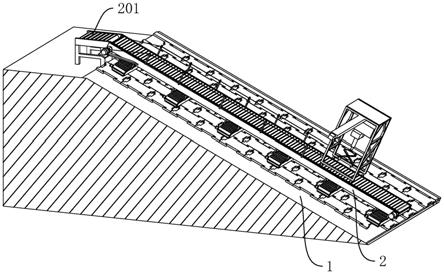
25.图1是本实施例一的整体结构示意图;图2是本实施例一的预制混凝土锁块机械衬砌设备的结构示意图;图3是本实施例一中预制混凝土锁块机械衬砌设备的局部示意图;图4是本实施例一中用于体现行走架与抓取转运装置的结构示意图;图5是图4中a部分的放大图;图6是本实施例一中用于体现夹爪抓取预制混凝土锁块的状态示意图;图7是本实施例二中的护坡结构示意图;图8是用于体现预制混凝土锁块的构示意图。
26.附图标记说明:1、坡面;2、机架;201、上料端;202、导轨;3、输送带;4、预制混凝土锁块;41、开槽;42、勾持部;43、第一扣合部;44、第二扣合部;45、扣合槽;46、浇筑槽;5、垫板;6、履带式行走装置;61、安装架;62、履带;63、第二驱动电机;7、行走架;71、行走轮;81、固定架;82、卷扬机;83、牵引钢索;9、引导轮;10、滑移座;101、凹槽;11、安装座;111、连接块;112、空腔;12、夹爪;121、抓取杆;122、抓取部;123、收拉钢索;131、直线电机的定子;132、直线电机的动子;14、转轴;15、减速电机;161、蜗轮;162、蜗杆;17、防护罩;18、导套;19、收放轮;20、收卷钢索;21、动力盒;22、第一驱动电机;23、减速箱;24、升降杆;241、勾持端;25、隔梗;26、碎石层。
具体实施方式
27.以下结合附图1-8对本技术作进一步详细说明。
28.实施例一:一种预制混凝土锁块机械衬砌设备,参照图1,该机械衬砌设备架设在所需铺筑的坡面1上,其中,坡面1与水平面之间的夹角大致为40
°
。
29.具体的,参照图1和图2,机械衬砌设备包括设置于坡面1的机架2以及转动设置在机架2上的输送带3。其中,机架2沿坡面1设置,机架2自坡面1的底部向顶部延伸。本实施例中,机架2的上料端201位于坡面1的顶部。输送带3沿机架2的长度方向设置,且用于输送预制混凝土锁块4。输送带3上间隔设置有用于承载预制混凝土锁块4的垫板5,垫板5沿输送带
3的宽度方向延伸,通过在输送带3上增设垫板5,从而减小预制混凝土锁块4对输送带3的损伤。
30.参照图2和图3,机架2的底部设置有用于驱动机架2沿垂直于输送带3的输送方向横向移动的履带式行走装置6,且履带式行走装置6为多组,多组履带式行走装置6沿机架2的延伸方向等间距分布。具体的,履带式行走装置6包括通过螺栓固定安装在机架2的底部的安装架61、转动安装在安装架61上的主动轮(图中未示出)、从动轮(图中未示出)以及设置于主动轮和从动轮之间的履带62,安装架61横跨机架2,主动轮和从动轮分别位于安装架61的两端,且履带62的内侧与主动轮、从动轮均啮合连接。安装架61的一侧还安装有用于驱动主动轮转动的第二驱动电机63。本实施例中,多组履带式行走装置6的第二驱动电机63为同步电机,以使得多个第二驱动电机63同步驱动履带62转动时,能够带动机架2沿坡面1横向移动,从而调整整个机架2的位置。
31.参照图2和图3,机架2上设置有横跨机架2的行走架7,行走架7能够相对机架2沿输送带3的输送方向来回滑动。具体的,行走架7整体呈方形设置,行走架7的底部转动安装有四个行走轮71四个行走轮71分别分布于行走架7的四角处。机架2的两侧均设有用于供行走轮71行走的导轨202,导轨202沿机架2的延伸方向设置。机架2的上料端201还设有用于驱动行走架7沿机架2的延伸方向来回行走的驱动装置。本实施例中,驱动装置有两组,两组驱动装置分别位于机架2的两侧,且两组驱动装置配合驱动行走架7移动。
32.具体的,参照图2和图3,驱动装置包括焊接于机架2的上料端201的固定架81、固定在固定架81上的卷扬机82以及卷绕于卷扬机82的卷绕端的牵引钢索83,牵引钢索83的一端沿导轨202的长度方向布设,且牵引钢索83远离卷扬机82的一端连接于行走架7。
33.为了使得牵引钢索83牵引更稳定,因此在机架2上还间隔设有多个用于引导牵引钢索83沿机架2的长度方向延伸的引导轮9,且多个引导轮9沿机架2的长度方向均匀分布。
34.卷扬机82收卷牵引钢索83时,通过牵引钢索83牵引行走架7沿机架2向坡面1的顶部移动,从而调节行走架7的位置;而当卷扬机82放卷牵引钢索83,由于坡面1具有斜度,使得机架2具有斜度,从而令行走架7在重力的分力作用下,沿着机架2的延伸方向向坡面1的底部滑动,滑动距离与牵引钢索83的放卷长度相对应,从而控制行走机架2的下降位置。
35.参照图3和图4,行走架7上设置有用于抓取输送带3上的预制混凝土锁块4并转移至铺设位置的抓取转运装置,抓取转运装置位于输送带3的上方。
36.具体的,抓取转运装置包括设置在行走架7上的滑移座10、转动连接于滑移座10的安装座11以及可升降地连接于安装座11的夹爪12。其中,滑移座10沿机架2的宽度方向滑动连接于行走架7,行走架7上设有用于驱动滑移座10滑动的水平移动组件。
37.参照图3和图4,水平移动组件包括设置于行走架7上直线电机,直线电机的定子131沿机架2的宽度方向设置,滑移座10固定连接于直线电机的动子132。滑移座10背离直线电机的动子132的一侧开设有凹槽101,凹槽101朝向机架2的一侧呈开口设置。凹槽101内转动设置有转轴14,转轴14沿机架2的长度方向设置,且转轴14的两端穿出于滑移座10的两侧。滑移座10的侧壁还设置有用于驱动转轴14转动的减速电机15,减速电机15的输出轴与转轴14之间设置有一对相互啮合的蜗轮161和蜗杆162,蜗轮161固定套设于转轴14的一端,蜗杆162转动承载于滑移座10的侧壁,减速电机15的输出轴连接于蜗杆162的一端。此外,滑移座10的侧壁还设有用于罩合减速电机15、蜗轮161以及蜗杆162的防护罩17。
38.参照图4,安装座11的侧壁一体成型有连接块111,连接块111固定连接于转轴14,以使得减速电机15驱动转轴14转动时,能够带动安装座11随着转轴14发生翻转,并且,利用蜗轮161蜗杆162配合的自锁特性,从而使得驱动电机停止驱动转轴14转动后,安装座11的翻转角度能够固定。
39.参照图4和图5,安装座11背离转轴14的一侧固定设置有中空的导套18,安装座11的内部开设有空腔112,空腔112连通导套18。空腔112内转动安装有收放轮19,收放轮19卷绕有收卷钢索20,收卷钢索20的一端延伸至导套18。安装座11的侧壁固定安装有动力盒21,动力盒21与空腔112贯通。动力盒21内固定安装有第一驱动电机22,第一驱动电机22的输出轴连接有减速箱23,减速箱23的输出轴穿入空腔112内并与收放轮19的轮轴连接。第一驱动电机22工作时,驱动收放轮19转动,从而实现收放轮19的收放线。通过减速箱23对第一驱动电机22的转速进行减速,从而令第一驱动电机22的动力输出更稳定。
40.结合图6,收卷钢索20延伸至导套18的一端连接有升降杆24,升降杆24穿设于导套18,升降杆24的底端穿出导套18外,且升降杆24穿出导套18外的一端设有用于与夹爪12相勾持配合的勾持端241。当夹爪12夹持预制混凝土锁块4时,通过第一驱动电机22驱动收放轮19收卷,从而带动升降杆24上升,以带动夹爪12夹持预制混凝土锁块4上升,然后通过直线电机驱动滑移座10沿机架2的宽度方向移动至所需放置预制混凝土锁块4的位置的上方,接着,再通过第一驱动电机22驱动收放轮19放卷,令升降杆24下降,从而使预制混凝土锁块4被放置在所需的位置。
41.具体的,参照图4和图6,夹爪12呈剪刀状设置。夹爪12包括两根相互铰接的抓取杆121,两根抓取杆121交叉设置,两根抓取杆121的一端均设置有抓取部122,两根抓取杆121的抓取部122配合形成用于勾持预制混凝土锁块4的勾持部42的抓取端。
42.参照图4、图5和图6,两根抓取杆121之间还设置有收拉钢索123,收拉钢索123的两端分别连接于两根抓取杆121远离抓取部122的一端。吊运预制混凝土锁块4时,首先将夹爪12的抓取端勾持于预制混凝土锁块4的勾持部42,然后将升降杆24的勾持端241勾持于收拉钢索123,当升降杆24上升时,拉动收拉钢索123上升,从而令收拉钢索123拉动两根抓取杆121远离抓取端的一端向相互靠近的方向移动,且夹爪12抓取预制混凝土锁块4抬升的过程中,利用预制混凝土锁块4的重力作用,从而令夹爪12的抓取端紧密夹紧预制混凝土锁块4的勾持部42,从而使得以使预制混凝土锁块4被勾持地更稳定。
43.本技术的实施原理为:铺筑预制混凝土锁块4时,首先调整行走架7的初始位置,使行走架7的初始位置位于坡面1的底部,从而自坡面1的底部向顶部铺设预制混凝土锁块4;通过吊车将预制混凝土锁块4整齐放置在输送带3的上料端201,且预制混凝土锁块4放置在输送带3的上料端201的中间位置,通过输送带3向前输送预制混凝土锁块4。当预制混凝土锁块4被运输到夹爪12的正下方时,通过第一驱动电机22驱动收放轮19放卷,使夹爪12下降,以令夹爪12的抓取端勾持预制混凝土锁块4的勾持部42,并通过第一驱动电机22驱动收放轮19收卷,从而使夹爪12抓取预制混凝土锁块4上升,然后通过直线电机驱动滑移座10水平移动,以令预制混凝土锁块4移动至所需放置的位置上方,接着驱动夹爪12下降从而松开预制混凝土锁块4。接着通过驱动装置驱动行走架7向输送带3的上料端201行走一个预制混凝土锁块4的长度距离,输送带3同步配合输送预制混凝土锁块4至夹爪12的正下方,从而对下一个预制混凝土锁块4进行抓取铺设,以此类推。当沿输送带3的长度方向铺设完成一列
预制混凝土锁块4后,通过履带式行走装置6驱动机架2整体横向水平移动,从而铺设下一列预制混凝土锁块4。
44.实施例二:一种机械衬砌护坡结构,参照图7,采用上述实施例一的机械衬砌设备铺筑预制混凝土锁块4。其中,护坡结构包括设置于坡面1的镇脚(图中未示出)、隔梗25、铺设于坡面1的碎石层26以及铺筑于碎石层26上的预制混凝土锁块4,预制混凝土锁块4沿坡面1依次排列分布,且相邻的两排预制混凝土锁块4相互扣接。
45.具体的,在坡面1均匀开设多个镇脚槽,镇脚设于镇脚槽内。本实施例中,镇脚为通过混凝土浇筑于镇脚槽,待混凝土凝固成型后,即为镇脚,且镇脚的一端微凸出于坡面1。
46.隔梗25沿坡面1的斜面设置,隔梗25自坡面1的顶部向底部延伸,且隔梗25间隔设置于坡面1。
47.当镇脚和隔梗25均浇筑成型后,在坡面1铺设碎石层26,且镇脚的顶部凸出于碎石层26。铺设完成后,利用上述实施例一的机械衬砌设备铺设预制混凝土锁块4,铺设时,自坡面1的底部向坡面1的顶部依次铺设一列预制混凝土锁块4列,该列预制混凝土锁块4命名为第一列预制混凝土锁块4。然后再控制机械衬砌设备沿坡面1横向移动,从而铺设下一列预制混凝土锁块4,该列预制混凝土锁块4命名为第二列预制混凝土锁块4列。相邻两列的预制混凝土锁块4相互错位设置,且第一列的预制混凝土锁块4列的锁块与第二列的预制混凝土锁块4列的锁块相互扣合。
48.参照图7和图8,本实施例中,预制混凝土锁块4大致呈方块设置,预制混凝土锁块4的两个相对的侧壁均设有一组扣合部。本实施例中,每组扣合部均包括第一扣合部43和第二扣合部44,第一扣合部43和第二扣合部44之间形成有扣合槽45,且相邻的两个预制混凝土锁块4的第一扣合部43和第二扣合相配合扣合于扣合槽45。
49.此外,预制混凝土锁块4的表面开设有两个开槽41,两个开槽41分别用于供夹爪12的两根抓取杆121的抓取部122伸入,且两个开槽41的截面呈t型设置,从而令开槽41的开口处形成具有收口边沿的勾持部42,以便于夹爪12的抓取部122配合勾持抓取。
50.预制混凝土锁块4的另外两个相对的侧壁均开设有浇筑槽46,用于浇筑混凝土,以使预制混凝土锁块4与镇脚凸出于碎石层26的一端浇筑连接,从而实现预制混凝土锁块4与坡面1之间的浇筑连接。
51.实施例三:一种预制混凝土锁块4机械衬砌护坡施工方法,采用上述实施例一的机械衬砌设备铺筑预制混凝土锁块4。具体的,方法包括,s1、施工准备,建立测量控制网,放置修坡样架;在工程开工前,参照设计图纸的测量基准点(线)为基础控制网,在坡面1设置用于工程施工的控制网,并按照施工要求以及设计图纸要求放置修坡样架。
52.s2、坡面1修平、填筑、压实;具体的,在施工范围内将堤基的不合格土、杂物等清除干净,堤基范围内的坑、槽、沟进行填筑、碾压使其相对密度符合规定要求。修坡以铲坡为主,尽量不回填;施工时,将坡面1的可能损伤土工布的带尖棱硬物清除。另外,对坡面1松软部位进行人工挖除,并置换合格土料进行回填至设计高程,对坡面1土方密实度不合格部位重新进行人工夯实至设计要
求。
53.s3、镇脚及隔梗25浇筑;根据施工图纸进行开挖镇脚槽,装设模板,然后浇筑混凝土,待混凝土凝固后洒水养护,养护在混凝土浇筑完毕后6-18小时内开始进行,养护时间至少28天。养护完成后,拆除模板。
54.s4、摊铺土工布、碎石垫层,碎石层26自坡面1的底部向顶部逐渐铺设至所需厚度;s5、通过预制混凝土锁块4机械衬砌设备铺筑预制混凝土锁块4;其中,铺筑预制混凝土锁块4包括,s51、调整行走架7的初始位置;s52、通过吊车将预制混凝土锁块4整齐放置在输送带3的上料端201,且预制混凝土锁块4放置在输送带3的上料端201的中间位置,通过输送带3向前输送预制混凝土锁块4;s53、当预制混凝土锁块4被运输到夹爪12的正下方时,通过第一驱动电机22驱动收放轮19放卷,使夹爪12下降,以令夹爪12的抓取端勾持预制混凝土锁块4的勾持部42,并通过第一驱动电机22驱动收放轮19收卷,从而使夹爪12抓取预制混凝土锁块4上升,然后通过直线电机驱动滑移座10水平移动,以令预制混凝土锁块4移动至所需放置的位置上方,接着驱动夹爪12下降从而松开预制混凝土锁块4;s54、通过卷扬机82收卷牵引钢索83以牵引行走架7向输送带3的上料端201行走一个预制混凝土锁块4的长度距离,输送带3同步配合输送预制混凝土锁块4至夹爪12的正下方,从而对下一个预制混凝土锁块4进行抓取铺设,以此类推;s55、沿输送带3的长度方向铺设完成一列预制混凝土锁块4后,通过履带式行走装置6驱动机架2整体横向水平移动,从而铺设下一列预制混凝土锁块4。
55.s6、在铺设好的预制混凝土锁块4浇筑混凝土,混凝土从预制混凝土锁块4的浇筑槽46渗入,并与镇脚浇筑连接,从而将预制混凝土锁块4浇筑固定于坡面1。
56.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。