1.本发明涉及海底固体矿产资源应用技术领域,特别是涉及一种利用海底地形剖面对视像数据定位校正方法及系统。
背景技术:
2.近海底摄像是海底热液硫化物资源调查最为有效的探测手段之一,而海底摄像数据的定位准确程度是进一步深入开展硫化物调查和研究工作的基础。近底摄像数据一般是通过船上拖曳的摄像拖体近海底采集完成,摄像设备的定位一般借助于固定在近底设备上的超短基线来实现。超短基线测量精度较高,但因测量环境等原因会造成不同程度的假数据和错误数据,甚至缺失数据,为摄像定位带来困难。
3.对于剔除超短基线数据中的异常值,国内外已开展了一些研究。李守军等(2008)提出了基于卡尔曼滤波技术并实现了惯性导航和超短基线的融合集成方法。周红伟等(2016)基于matlab程序开发了一款超短基线数据后处理软件,该软件先对声学应答器定位跳点数据进行剔除,然后对剔除后的数据进行平滑滤波,得到了光滑的曲线。单瑞等(2019)基于抗差自适应卡尔曼滤波算法对超短基线定位数据进行了处理,滤除了定位数据中的跳点,得到了较平滑且与原始数据相吻合的滤波数据。morgado et al(2006)提出了超短基线和惯性导航耦合并利用卡尔曼滤波算子的数据处理方法。augenstein et al(2008)讨论了超短基线产生异常点和数据丢失的原因,并提出了融合gps、del和超短基线运用惯性导航法处理数据的方法。目前对海底视像数据的定位手段即利用超短基线定位,但该技术目前存在以下几个问题:
4.(1)由于受海洋环境动态变化、测量仪器安装校准偏差、外围设备测量可靠性、声速测量与改正精度等因素的影响,超短基线定位会出现较大粗差和连续异常误差。
5.(2)由于超短基线定位系统是水下声学定位技术中的一种,针对水声定位系统而言,水下声速的不均匀分布会引起声线弯曲,进而严重影响系统的定位精度。
6.(3)通过超短基线定位系统获取的数据会有大量的错误点、异常值,这会导致定位数据在时间与空间两个尺度都产生信息错位,甚至有的测线找不出任何能够通过对超短基线数据本身处理来实现定位的方法,使调查的视像数据与实际地理位置无法对应,也即无法准确定位通过视像获得的硫化物矿点,严重影响视像数据的使用和分析研究。
7.综上论述,目前利用超短基线对海底视像数据的定位存在精度低以及准确率低等问题,如何克服上述问题,成为本领域亟需解决的技术问题。
技术实现要素:
8.本发明的目的是提供一种利用海底地形剖面对视像数据定位校正方法及系统,以提高校正准确性以及精度。
9.为实现上述目的,本发明提供了一种利用海底地形剖面对视像数据定位校正方法,所述方法包括:
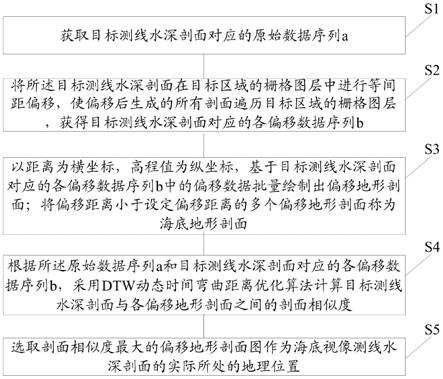
10.步骤s1:获取目标测线水深剖面对应的原始数据序列a;
11.步骤s2:将所述目标测线水深剖面在目标区域的栅格图层中进行等间距偏移,使偏移后生成的所有剖面遍历目标区域的栅格图层,获得目标测线水深剖面对应的各偏移数据序列b;
12.步骤s3:以距离为横坐标,高程值为纵坐标,基于目标测线水深剖面对应的各偏移数据序列b中的偏移数据批量绘制出偏移地形剖面;将偏移距离小于设定偏移距离的多个偏移地形剖面称为海底地形剖面;
13.步骤s4:根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b,采用dtw动态时间弯曲距离优化算法计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度;
14.步骤s5:选取剖面相似度最大的偏移地形剖面图所在的地理位置作为海底视像测线水深剖面的实际所处的地理位置。
15.可选地,步骤s4具体包括:
16.步骤s41:采用dtw动态时间弯曲距离优化算法,根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b计算动态时间弯曲度;
17.步骤s42:根据所述动态时间弯曲度计算两序列之间的原始距离;
18.步骤s43:根据两序列之间的原始距离计算两序列之间的距离相似度;
19.步骤s44:将最大距离相似度对应的原始距离作为最短距离,最短距离对应的路径为最优路径;
20.步骤s45:基于计算最短距离时的最优路径节点个数和每段对角直线的长度计算惩罚系数;
21.步骤s46:根据惩罚系数、两序列之间的原始距离计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度。
22.可选地,所述采用dtw动态时间弯曲距离优化算法,根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b计算动态时间弯曲度,具体公式为:
[0023][0024]
其中,d中w(a,b)表示动态时间弯曲度,dist(a1,b1)表示剖面数据序列上首个不为0的数据点,min函数用来计算除首个数据点之外,其他所有数据点间的最小距离和,m表示偏移数据序列b的长度,n表示原始数据序列a的长度,min函数中,n和m均表示大于2的正整数。
[0025]
可选地,所述基于计算最短距离时的最优路径节点个数和每段对角直线的长度计算惩罚系数,具体公式为:
[0026][0027]
其中,comleni表示计算最短距离时第i段对角直线的长度,seqlen表示计算最短距离时的最优路径节点个数,α表示惩罚系数。
[0028]
可选地,所述根据惩罚系数、两序列之间的原始距离计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度,具体公式为:
[0029]
up_distance=distance
×
α
[0030][0031]
其中,distance表示两序列之间的原始距离,α表示惩罚系数,up_similarity表示目标测线水深剖面与各偏移地形剖面之间的剖面相似度。
[0032]
本发明还提供一种利用海底地形剖面对视像数据定位校正系统,所述系统包括:
[0033]
获取模块,用于获取目标测线水深剖面对应的原始数据序列a;
[0034]
偏移模块,用于将所述目标测线水深剖面在目标区域的栅格图层中进行等间距偏移,使偏移后生成的所有剖面遍历目标区域的栅格图层,获得目标测线水深剖面对应的各偏移数据序列b;
[0035]
绘图模块,用于以距离为横坐标,高程值为纵坐标,基于目标测线水深剖面对应的各偏移数据序列b中的偏移数据批量绘制出偏移地形剖面;将偏移距离小于设定偏移距离的多个偏移地形剖面称为海底地形剖面;
[0036]
剖面相似度计算模块,用于根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b,采用dtw动态时间弯曲距离优化算法计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度;
[0037]
校正模块,用于选取剖面相似度最大的偏移地形剖面图所在的地理位置作为海底视像测线水深剖面的实际所处的地理位置。
[0038]
可选地,所述剖面相似度计算模块具体包括:
[0039]
动态时间弯曲度计算单元,用于采用dtw动态时间弯曲距离优化算法,根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b计算动态时间弯曲度;
[0040]
原始距离计算单元,用于根据所述动态时间弯曲度计算两序列之间的原始距离;
[0041]
距离相似度计算单元,用于根据两序列之间的原始距离计算两序列之间的距离相似度;
[0042]
最优距离确定单元,用于将最大距离相似度对应的原始距离作为最短距离,最短距离对应的路径为最优路径;
[0043]
惩罚系数计算单元,用于基于计算最短距离时的最优路径节点个数和每段对角直线的长度计算惩罚系数;
[0044]
面相似度计算单元,用于根据惩罚系数、两序列之间的原始距离计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度。
[0045]
可选地,所述采用dtw动态时间弯曲距离优化算法,根据所述原始数据序列a和目
标测线水深剖面对应的各偏移数据序列b计算动态时间弯曲度,具体公式为:
[0046][0047]
其中,d中w(a,b)表示动态时间弯曲度,dist(a1,n1)表示剖面数据序列上首个不为0的数据点,min函数用来计算除首个数据点之外,其他所有数据点间的最小距离和,m表示偏移数据序列b的长度,n表示原始数据序列a的长度,min函数中,n和m均表示大于2的正整数。
[0048]
可选地,所述基于计算最短距离时的最优路径节点个数和每段对角直线的长度计算惩罚系数,具体公式为:
[0049][0050]
其中,comleni表示计算最短距离时第i段对角直线的长度,seqlen表示计算最短距离时的最优路径节点个数,α表示惩罚系数。
[0051]
可选地,所述根据惩罚系数、两序列之间的原始距离计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度,具体公式为:
[0052]
up_distance=distance
×
α
[0053][0054]
其中,distance表示两序列之间的原始距离,α表示惩罚系数,up_similarity表示目标测线水深剖面与各偏移地形剖面之间的剖面相似度。
[0055]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0056]
本发明公开的方案无需利用超短基线定位系统获取的数据,只需获取目标测线水深剖面对应的原始数据序列就可以在目标区域内按照一定间隔批量提取并绘制偏移地形剖面,对dtw(dynamic time warping)动态时间弯曲距离算法进行改进,使用改进后的算法批量计算提取后的偏移地形剖面与目标剖面的相似度,最终达到能够快速、高准确率地在目标区域内匹配出与目标地形剖面相似度最高的地形剖面,实现对海底视像数据进行定位校正的目的。另外在定位校正的过程中解决了dtw原始算法在本领域应用上的局限性。
附图说明
[0057]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0058]
图1为本发明利用海底地形剖面对视像数据定位校正方法流程图;
[0059]
图2为本发明病态匹配示例图;
[0060]
图3为本发明两序列匹配示意图;
[0061]
图4为本发明利用海底地形剖面对视像数据定位校正系统结构图;
[0062]
图5为本发明目标线要素及目标区域示意图;
[0063]
图6为本发明遍历目标区域的地形剖面示意图;
[0064]
图7为目标测线、校正后的测线位置及其剖面对比示意图。
具体实施方式
[0065]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0066]
本发明的目的是提供一种利用海底地形剖面对视像数据定位校正方法及系统,以提高校正准确性以及精度。
[0067]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
[0068]
研究思路是:在实际进行海底资源调查作业时,摄像拖体通过近海底拖曳作业,获取海底高清照片和视频资料等视像数据。摄像拖体上会同时绑定一个温盐深传感器,即可以获得摄像拖体的实时水深数据。在实际的作业任务中,要求拖体保持一定的航速沿着设定好的测线前进,因而摄像拖体的航速和航向是可以确定的,并且拖体的轨迹与母船的行驶轨迹基本相似。由于母船的行驶轨迹已知,即可知摄像拖体在作业时行进的方向及长度。另外,通过摄像拖体上绑定的温盐深传感器,可以获得其在行进时连续的水深数据,即该摄像拖体的视像测线水深剖面。最后,在目标区域的高精地形数据中提取尽可能多的与摄像拖体的行进方向、长度相同的地形剖面,并将获得的海量地形剖面与视像测线水深剖面通过dtw动态时间弯曲距离算法进行匹配,找出目标区域内与摄像拖体行进时水深剖面相似度最高的偏移地形剖面图所在的地理位置,即可对摄像拖体进行定位校正。
[0069]
实施例1
[0070]
如图1所示,本发明公开一种利用海底地形剖面对视像数据定位校正方法,所述方法包括:
[0071]
步骤s1:获取目标测线水深剖面对应的原始数据序列a。
[0072]
步骤s2:将所述目标测线水深剖面在目标区域的栅格图层中进行等间距偏移,使偏移后生成的所有剖面遍历目标区域的栅格图层,获得目标测线水深剖面对应的各偏移数据序列b。
[0073]
步骤s3:以距离为横坐标,高程值为纵坐标,基于目标测线水深剖面对应的各偏移数据序列b中的偏移数据批量绘制出偏移地形剖面;将偏移距离小于设定偏移距离的多个偏移地形剖面称为海底地形剖面。
[0074]
步骤s4:根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b,采用dtw动态时间弯曲距离优化算法计算目标测线水深剖面与各偏移地形剖面之间的剖面
相似度。
[0075]
步骤s5:选取剖面相似度最大的偏移地形剖面图所在的地理位置作为海底视像测线水深剖面的实际所处的地理位置。
[0076]
下面对各个步骤进行详细论述:
[0077]
步骤s1:获取目标测线水深剖面对应的原始数据序列a,a=(a1,a2,
…ai
,
…an
),长度为n,n为大于2的正整数,ai表示第i个目标测线水深剖面对应的原始数据;所述目标测线水深剖面对应的数据包括整个目标测线中每一个栅格的经纬度和高程信息。
[0078]
本实施例中,使用arcpy工具包的da.updatecursor函数读取目标测线水深剖面对应的数据,进而构成目标测线水深剖面对应的原始数据序列。
[0079]
步骤s2:将所述目标测线水深剖面在目标区域的栅格图层中进行等间距偏移,使偏移后生成的所有剖面遍历目标区域的栅格图层,获得目标测线水深剖面对应的各偏移数据序列b,b=(b1,b2,
…bj
,
…bm
),长度为m,m为大于2的正整数,bj表示各目标测线水深剖面对应的偏移数据。各目标测线水深剖面对应的偏移数据包括first_dist值和first_z值,其中,first_dist值为偏移后剖面每一点距离偏移后剖面起点的欧氏距离,first_z值为偏移后的高程值,是结合偏移后剖面所处目标区域的位置与原始栅格数据得到的。目标区域的栅格图层是由多个目标区域的原始栅格数据绘制而成,所述目标区域的原始栅格数据包括目标区域中每一个栅格的经纬度和高程信息。
[0080]
本实施例中,使用arcpy工具包的describe函数、raster函数分别获取待校正的目标测线水深剖面在x、y方向上的长度范围以及目标区域的栅格范围,再使用math工具包的floor函数,计算出目标测线水深剖面在目标区域范围内,东西南北四个方向上的最多偏移次数,并进行批量偏移。使用arcpy工具包的array函数将偏移后的所有剖面坐标记录为坐标数组、使用arcpy工具包的polyline函数将坐标数组转为arcpy工具包可以识别的polyline类、最后使用循环语句及arcpy工具包的copyfeatures_management函数批量导出偏移后剖面的栅格数据(即目标测线水深剖面对应的各偏移数据序列b)。
[0081]
本发明将目标测线水深剖面进行遍历目标区域的偏移操作是进行地形剖面匹配首先要进行的工作。偏移后的剖面间隔距离越小,越能全面地覆盖目标区域,地形剖面的匹配结果越精准。之后将每个偏移后的剖面通过沿线引入新折点,以捕捉剖面特征的方式,沿其重叠剖面目标增密。沿此增密方法输入剖面的高程、距离以及有关剖面目标的其余信息一起存储在csv类型的输出表中,以作为绘制地形剖面图和计算地形剖面相似度的数据来源。
[0082]
步骤s3:以距离为横坐标,高程值为纵坐标,基于目标测线水深剖面对应的各偏移数据序列b中的偏移数据批量绘制出偏移地形剖面。
[0083]
本实施例中,使用循环语句以及arcpy工具包的stackprofile_3d函数将目标测线水深剖面对应的各偏移数据序列b批量输出存储至csv类型的输出表中。使用pandas工具包的read_csv函数读取输出表中各目标测线水深剖面对应的偏移数据,再使用循环语句及pylab工具包批量绘制出偏移地形剖面,并储存到指定文件夹。将多个偏移地形剖面称为海底地形剖面。
[0084]
步骤s4:根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b,采用dtw动态时间弯曲距离优化算法计算目标测线水深剖面与各偏移地形剖面之间的剖面
相似度。
[0085]
由于地形剖面本质上是由序列中n个点坐标(first_dist,first_z)构成的折线,欲计算目标测线水深剖面与批量偏移后获得的偏移地形剖面间的相似度可使用python,调用numpy、math工具先计算出它们之间的相似距离(distance),再通过相似距离计算出它们之间的相似度(similarity),本发明具体计算过程如下:
[0086]
步骤s41:采用dtw动态时间弯曲距离优化算法,根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b计算动态时间弯曲度,具体公式为:
[0087][0088]
其中,d中w(a,b)表示动态时间弯曲度,dist(a1,b1)表示剖面数据序列上首个不为0的数据点,min函数用来计算除首个数据点之外,其他所有数据点间的最小距离和,m表示偏移数据序列b的长度,n表示原始数据序列a的长度,min函数中,n和m均表示大于2的正整数。
[0089]
步骤s42:根据所述动态时间弯曲度计算两序列之间的原始距离,具体公式为:
[0090]
distance=d中w(a,b)
[0091]
其中,distance表示两序列之间的原始距离。
[0092]
步骤s43:根据两序列之间的原始距离计算两序列之间的距离相似度,具体公式为:
[0093][0094]
其中,similarity表示两序列之间的距离相似度。
[0095]
步骤s44:将最大距离相似度对应的原始距离作为最短距离,最短距离对应的路径为最优路径。
[0096]
在基于python的dtw算法的地形剖面序列相似性匹配计算过程中,某些地形剖面数据序列具有周期性的起伏变化特征,其曲线的单调性推进速率不一致。这将会导致在上述算法的计算过程中,路径方向只能为了维持短暂的单调性而多次调整,这会使得在计算地形剖面序列的距离时,出现波峰波谷走势不一致的“病态匹配”现象。
[0097]
以图2为例,由于在虚线圈出所示位置两个地形剖面序列之间距离过大,这样加大了两个序列间的原始距离,会导致在匹配过程中出现“病态匹配”的现象。如果将曲线通过适当前移或后移,即可以满足区域走势相似,从而消除“病态匹配”对相似度的影响。由于两个序列的最长公共子串越长,偏差越小,需要调整的幅度越小。所以,本发明定义一个惩罚系数α来对原始算法进行调整。每段对角直线的长度如图3中斜线。
[0098]
步骤s45:基于计算最短距离时的最优路径节点个数和每段对角直线的长度计算惩罚系数,具体公式为:
[0099][0100]
其中,comleni表示计算最短距离时第i段对角直线的长度,seqlen表示计算最短距离时的最优路径节点个数,α表示惩罚系数。
[0101]
步骤s46:根据惩罚系数、两序列之间的原始距离计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度(即改进后的相似度),具体公式为:
[0102]
up_distance=distance
×
α
[0103][0104]
其中,distance表示两序列之间的原始距离,α表示惩罚系数,up_similarity表示目标测线水深剖面与各偏移地形剖面之间的剖面相似度。
[0105]
步骤s5:选取剖面相似度最大的偏移地形剖面图所在的地理位置作为海底视像测线水深剖面的实际所处的地理位置。本实施例中,通过python将目标测线水深剖面与各偏移地形剖面之间的剖面相似度进行排序,匹配出目标区域内与目标测线水深剖面相似度最高的地形剖面,即达到对视像测线水深剖面进行定位校正的目的。
[0106]
地形剖面序列间的相似度计算及匹配是本发明的关键环节,通过选取适用于地形剖面匹配的dtw动态时间弯曲距离算法,来进行地形剖面序列间相似度的计算。在计算的过程中发现了dtw原始算法在本领域应用上的局限性。针对“某些地形剖面数据序列具有周期性的起伏变化特征,其曲线的单调性推进速率不一致,进而导致错误匹配”这一问题进行了算法的改进。本发明对数据序列相似度的测算进行了更为细致的研究,开展基于python的批量地形剖面匹配综合解算,最终实现在目标区域内匹配出与目标测线水深剖面相似度最高的地形剖面,即达到对海底视像数据进行定位校正的目的。
[0107]
实施例2
[0108]
如图4所示,本发明还一种利用海底地形剖面对视像数据定位校正系统,所述系统包括:
[0109]
获取模块401,用于获取目标测线水深剖面对应的原始数据序列a。
[0110]
偏移模块402,用于将所述目标测线水深剖面在目标区域的栅格图层中进行等间距偏移,使偏移后生成的所有剖面遍历目标区域的栅格图层,获得目标测线水深剖面对应的各偏移数据序列b。
[0111]
绘图模块403,用于以距离为横坐标,高程值为纵坐标,基于目标测线水深剖面对应的各偏移数据序列b中的偏移数据批量绘制出偏移地形剖面;将偏移距离小于设定偏移距离的多个偏移地形剖面称为海底地形剖面。
[0112]
剖面相似度计算模块404,用于根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b,采用dtw动态时间弯曲距离优化算法计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度。
[0113]
校正模块405,用于选取剖面相似度最大的偏移地形剖面图所在的地理位置作为海底视像测线水深剖面的实际所处的地理位置。
[0114]
作为一种可选的实施方式,本发明所述剖面相似度计算模块404具体包括:
[0115]
动态时间弯曲度计算单元,用于采用dtw动态时间弯曲距离优化算法,根据所述原始数据序列a和目标测线水深剖面对应的各偏移数据序列b计算动态时间弯曲度。
[0116]
原始距离计算单元,用于根据所述动态时间弯曲度计算两序列之间的原始距离。
[0117]
距离相似度计算单元,用于根据两序列之间的原始距离计算两序列之间的距离相似度。
[0118]
最优距离确定单元,用于将最大距离相似度对应的原始距离作为最短距离,最短距离对应的路径为最优路径。
[0119]
惩罚系数计算单元,用于基于计算最短距离时的最优路径节点个数和每段对角直线的长度计算惩罚系数。
[0120]
面相似度计算单元,用于根据惩罚系数、两序列之间的原始距离计算目标测线水深剖面与各偏移地形剖面之间的剖面相似度。
[0121]
与实施例1相同的公式在此不再一一赘述。
[0122]
实施例3
[0123]
在对海底视像水深剖面进行定位校正之前,首先查看原始数据的属性。如图5所示,本发明所使用的原始数据(研究区域auv高精地形数据)tag20marea,其数据精度为1m
×
1m,grid栅格格式,数据范围为26.1788306731~26.1291175383、-44.834999084~-44.799911499,空间参考坐标系gcs_wgs_1984,基准面d_wgs_1984。目标线要素(目标测线水深剖面)数据line,范围为26.170278~26.164633、-44.829083~-44.824617,shapefile空间数据类型,地理坐标系gcs_wgs_1984,基准面d_wgs_1984。
[0124]
步骤s1:在研究目标区域tag20marea内对目标线要素line按照东西南北均间隔10米进行批量偏移,如图6所示,(a)图为部分偏移后的剖面位置示意图;(b)图为部分偏移后的地形剖面图;(c)图为目标区域等高线示意图,偏移后获得偏移地形剖面186526条,命名为offlines_merge,shapefile空间数据类型,地理坐标系gcs_wgs_1984,基准面d_wgs_1984。
[0125]
步骤s2:批量读取并保存偏移后剖面的数据。由于arcpy工具包本身对批量读取地形剖面的数据量有上限的限制,故将步长设置为10000,即将地形剖面分批进行数据读取与保存。经过数据读取,将186526条剖面的数据保存储到offlines.csv文件中。
[0126]
步骤s3:批量绘制水深偏移地形剖面图。读取步骤s2保存的地形剖面数据,批量绘制偏移地形剖面图。将绘制的186526张地形剖面图以“profile_剖面序号”命名并保存为186256个png图像文件。
[0127]
步骤s4:通过python的dtw动态时间弯曲距离优化算法批量计算偏移后地形剖面序列与目标剖面序列的相似度。使用改进后的算法批量计算偏移后186526个地形剖面序列与目标地形剖面序列的相似度,并将相似度的计算结果存储到dtwresult.csv文件中,详见表1。
[0128]
表1地形剖面相似度匹配结果表
[0129]
[0130][0131]
步骤s5:对计算出的相似度进行降序排序,结果显示:线要素line_96492所在位置的地形剖面序列与目标地形剖面序列的相似度为90.703%。经计算,该剖面序列在目标区域内,与目标地形剖面(即视像测线水深剖面)相似度最高,即判定水深地形剖面的实际所处的地理位置应为剖面line_96492所在的地理位置,最终实现了对海底视像数据进行定位校正。图7给出了目标测线、校正后的测线位置及其剖面对比示意图。
[0132]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0133]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。