技术特征:
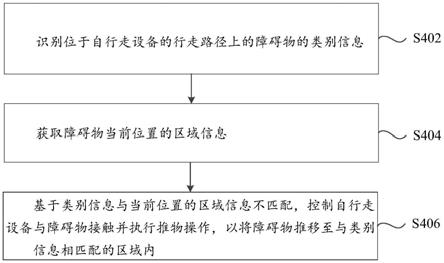
1.一种自行走设备的控制方法,其特征在于,所述控制方法包括:识别位于所述自行走设备的行走路径上的障碍物的类别信息;获取所述障碍物当前位置的区域信息;基于所述类别信息与所述当前位置的区域信息不匹配,控制所述自行走设备与所述障碍物接触并执行推物操作,以将所述障碍物推移至与所述类别信息相匹配的区域内。2.根据权利要求1所述的自行走设备的控制方法,其特征在于,还包括:在与所述障碍物接触后,获取所述障碍物的受力信息;基于所述受力信息小于预设阈值,控制所述自行走设备执行所述推物操作,否则,控制所述自行走设备执行避障操作。3.根据权利要求2所述的自行走设备的控制方法,其特征在于,所述自行走设备包括碰撞传感器,所述获取所述障碍物的受力信息,包括:获取所述碰撞传感器在与所述障碍物接触过程中感应到的作用力信息。4.根据权利要求1所述的自行走设备的控制方法,其特征在于,还包括:获取地图信息;其中,所述地图信息中包含至少两个区域的区域信息,任一所述区域的区域信息关联有一种以上的障碍物的类别信息。5.根据权利要求4所述的自行走设备的控制方法,其特征在于,任一所述区域的区域信息关联有一种以上的障碍物的类别信息,具体包括:任一所述区域对应一标签,每一标签对应一先验数据集,其中,同一所述标签中的所述先验数据集所对应的障碍物的种类相同。6.根据权利要求4所述的自行走设备的控制方法,其特征在于,任一所述区域的区域信息关联有一种以上的障碍物的类别信息,具体包括:基于接收到的针对所述地图信息中的任一所述区域信息添加障碍物的属性信息的命令,建立所述区域与所述障碍物的属性的对应关系。7.根据权利要求1至6中任一项所述的自行走设备的控制方法,其特征在于,所述行走路径包括预定清扫行走路径,在控制所述自行走设备与所述障碍物接触并执行推物操作,以将所述障碍物推移至与所述类别信息相匹配的区域内之后,所述控制方法还包括:控制所述自行走设备返回至所述当前位置处,并继续沿所述预定清扫行走路径执行清扫操作;或判断所述自行走设备当前所在的区域是否完成清扫,若是,控制所述自行走设备移动至相邻的未清扫区域重新开始执行清扫操作,否则,控制所述自行走设备开始执行清扫操作。8.一种自行走设备的控制装置,其特征在于,所述控制装置包括:感知模块,用于识别位于所述自行走设备的行走路径上的障碍物的类别信息;还用于:获取所述障碍物当前位置的区域信息;控制模块,用于基于所述类别信息与所述当前位置的区域信息不匹配,控制驱动模块驱动所述自行走设备与所述障碍物接触并执行推物操作,以将所述障碍物推移至与所述类别信息相匹配的区域内。9.一种自行走设备,其特征在于,包括处理器和存储器;
所述存储器,用于存储操作指令;所述处理器,用于通过调用所述操作指令,执行上述权利要求1至7中任一项所述的自行走设备的控制方法。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现上述权利要求1至7中任一项所述的自行走设备的控制方法。
技术总结
本公开实施例提供了一种自行走设备的控制方法、装置、自行走设备和存储介质。其中,自行走设备的控制方法包括:识别位于自行走设备的行走路径上的障碍物的类别信息;获取障碍物当前位置的区域信息;基于类别信息与当前位置的区域信息不匹配,控制自行走设备与障碍物接触执行推物操作,以将障碍物推移至与类别信息相匹配的区域内。由此,使得自行走设备在遇到障碍物的时能,能够实现障碍物的归类收纳功能,扩大了自行走设备的功能。扩大了自行走设备的功能。扩大了自行走设备的功能。
技术研发人员:韩馨宇
受保护的技术使用者:北京石头世纪科技股份有限公司
技术研发日:2021.12.07
技术公布日:2022/4/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。