技术特征:
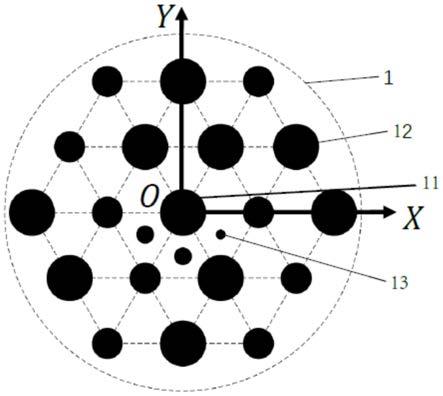
1.一种平面编码靶标,其特征在于,包括多个呈阵列分布的编码单元,所述编码单元包括一个中心编码点、多个平常编码点和至少一个定位点,以所述中心编码点为圆心和r为构造半径构造所述编码单元的圆形编码区域,各个所述平常编码点位于所述圆形编码区域的内部或边缘;所述中心编码点和其相邻的任意两个平常编码点构成定位区域,相邻的任意三个平常编码点构成编码子区域,所述编码子区域和定位区域为面积相等的等边三角形,所述定位点位于所述定位区域,且每个所述定位区域只允许存在一个所述定位点;当所述编码单元只有一个所述定位点时,所述定位点不能在所述定位区域的重心位置;所述编码单元的编码单元坐标系为以所述中心编码点为原点,向所述中心编码点相邻的其中一个平常编码点的方向为x轴,垂直于所述x轴的方向为y轴;所述中心编码点和所述平常编码点均设有编码点图案,通过在所述中心编码点和所述平常编码点上设置不同的所述编码点图案进行编码,各种所述编码点图案具有互不相同且唯一的编码数值,所述中心编码点和所述平常编码点均具有互不相同且唯一的编码序号;所述定位点的定位点分布样式用于确定所述中心编码点和所述平常编码点在所述编码单元坐标系的坐标;所述编码单元按照所述编码点序号依次获取所述中心编码点和所述平常编码点上的编码点图案的编码数值,生成所述编码单元的编码数值序列,各个所述编码单元编码数值序列互不相同且唯一。2.根据权利要求1所述的一种平面编码靶标,其特征在于,所述编码单元按照预设的采样顺序,给所述中心编码点和每个所述平常编码点分别标上唯一的编码序号,所述编码序号分别为0~k-1,其中k为所述中心编码点和所述平常编码点的数量总和;所述编码点图案的编码数值的取值分别为0、1、
…
、n-2、n-1,n为所述编码点图案的种类数量;所述编码单元按照所述编码点序号依次获取所述中心编码点和所述平常编码点上的编码点图案的编码数值分别为v0、v1、
…
、v
k-2
、v
k-1
,生成所述编码单元的编码数值序列[v0,v1,
…
,v
k-2
,v
k-1
]。3.根据权利要求1所述的一种平面编码靶标,其特征在于,所述定位点分布样式设有m种,设置所述定位点分布样式的序号分别为0、1、
…
、m-2、m-1,第m种的定位点分布样式所含的定位点的个数为k
′
m
,其中0≤m≤m-1,1≤k
′
m
≤6,m∈z,k
′
m
∈z;从所述编码单元坐标系的x轴开始顺时钟给定位点编号,得到所述定位点的定位点编号分别为0~k
′
m-1;所述定位点设有相同的定位点图案或不完全相同的定位点图案;当所述编码单元的定位点的定位点图案完全相同时,所述定位点图案用于确定所述中心编码点和所述编码单元坐标系;当所述编码单元的定位点的定位点图案不完全相同时,定义所述定位点的定位点图案的种类数量为n
′
种,为每种所述定位点图案赋予唯一的图案编号,所述图案编号的取值范围为0、1、
…
、n
′‑
2、n
′‑
1;每个所述定位点的校验数值为:
其中,c
k
为定位点编号为k的定位点的校验数值,生成所述编码单元的校验数值序列为v
i
是所述编码单元的编码数值序列[v0,v1,
…
,v
k-2
,v
k-1
]中的每一项;且当n
′
=1时,定位点只用于定位所述中心编码点和所述编码单元坐标系;所述编码单元的校验数值序列用于在识别阶段,对采集的所述编码单元的编码数值序列进行校验。4.根据权利要求3所述的一种平面编码靶标,其特征在于,所述平面编码靶标的编码图案是以生成的第一个所述编码单元的编码单元坐标系为基准坐标,通过不断向邻近未编码区域拓展多个所述编码单元来扩大编码区域的;在所述平面编码靶标的编码图案中,每个所述编码单元的编码单元坐标系的x轴朝向相同且相互平行,每个所述编码单元的编码单元坐标系的y轴朝向相同且相互平行;还包括数值序列容器,所述数值序列容器记录拓展的编码单元在所述基准坐标系上的坐标及其编码数值序列,所述数值序列容器包含多条记录,每一条所述记录储存一个编码单元的在所述基准坐标系上的坐标、编码数值序列、定位点分布样式的序号和校验数值序列。5.根据权利要求3所述的一种平面编码靶标,其特征在于,所述编码点图案和定位点图案均为几何形状,各种所述编码点图案之间在至少一个差异属性上存在不同,各种所述定位点图案之间也在至少一个差异属性上存在不同,所述差异属性包括形状、尺寸、颜色和透明度;所述编码子区域的边长和所述定位区域的边长均为l,且所述边长l不大于所述构造半径r;不同的所述编码单元的定位点分布样式相同或不同,不同的所述定位点分布样式之间在定位点相对于中心编码点的分布位置不同,不同的所述定位点分布样式的定位点的数量相同或不同。6.应用权利要求1至5任意一项所述的一种平面编码靶标的二维图像拼接系统,其特征在于,包括数据处理装置、第一图像采集装置、第二图像采集装置、采集装置连接支架、第一xy运动平台、所述平面编码靶标、编码靶标固定基座、第二xy运动平台和被测物固定基座;所述第一图像采集装置通过所述采集装置连接支架和第二图像采集装置连接,所述采集装置连接支架和所述第一xy运动平台连接,所述第一xy运动平台驱动所述采集装置连接支架运动,所述第一图像采集装置和第二图像采集装置分别通过数据传输线和所述数据处理装置通信连接;所述平面编码靶标覆盖整个所述编码靶标固定基座的上表面,所述被测物固定基座的上表面用于放置并固定被测物,所述编码靶标固定基座和所述被测物固定基座均固定于所述第二xy运动平台,所述第二xy运动平台驱动所述编码靶标固定基座和所述被测物固定基座同步运动,所述第二xy运动平台位于所述第一xy运动平台的下方;所述第一图像采集装置的光轴方向和所述第二图像采集装置的光轴方向平行,且所述
第一图像采集装置的光轴方向垂直指向所述编码靶标固定基座的上表面,所述第二图像采集装置的光轴方向垂直指向所述被测物固定基座的上表面;所述第一xy运动平台的运动平面和所述第一图像采集装置的光轴方向相垂直;所述第二xy运动平台的运动平面、所述第一xy运动平台的运动平面、所述编码靶标固定基座的上表面和所述被测物固定基座的上表面相互平行。7.根据权利要求6所述的一种平面编码靶标的二维图像拼接系统的拼接方法,其特征在于,包括以下步骤:靶标生成步骤,所述数据处理装置根据测量场合的要求,生成对应的所述平面编码靶标并将所述平面编码靶标设置于所述编码靶标固定基座的上表面;坐标系建立步骤,所述数据处理装置分别建立所述第二xy运动平台的第二xy运动平台坐标系o
p-x
p
y
p
,所述第一xy运动平台的第一xy运动平台坐标系o
′
p-x
′
p
y
′
p
,所述平面编码靶标的平面编码靶标坐标系o
t-x
t
y
t
,所述第一图像采集装置采集的第一图像的第一图像坐标系o-u
1v1
,所述第二图像采集装置采集的第二图像的第二图像坐标系o-u
2v2
,和储存图像拼接所需的拼接图像坐标系;拼接原点设定步骤,通过所述第一xy运动平台和第二xy运动平台的运动将所述第一图像采集装置的视场移动至所述平面编码靶标的左下角区域,然后同时触发所述第一图像采集装置和所述第二图像采集装置采集图像,采集到的第一张所述第一图像和第一张所述第二图像构成第1次采集图像对,所述第一图像需包含至少一个所述编码单元的图案,然后计算所述第1次采集图像对中的第一图像的图像中心位于所述平面编码靶标坐标系o
t-x
t
y
t
的坐标(x
′0,y
′0),并将所述第1次采集图像对中的第二图像置于所述拼接图像坐标系的原点处;拼接步骤,所述第一xy运动平台和第二xy运动平台配合进行步进扫描,同时触发所述第一图像采集装置和所述第二图像采集装置采集图像,获得第i次采集图像对,i>1,且i∈z,然后计算所述第i次采集图像对中的第一图像的图像中心位于所述平面编码靶标坐标系o
t-x
t
y
t
的坐标(x
′
i
,y
′
i
),将所述坐标(x
′
i
,y
′
i
)转换成第i次采集图像对中的第二图像的位于所述拼接图像坐标系的坐标(x
″
i
,y
″
i
),根据所述坐标(x
″
i
,y
″
i
)将所述第i次采集图像对中的第二图像拼接至所述拼接图像坐标系的坐标(x
″
i
,y
″
i
)处;判断步骤,判断当前已拼接区域是否达到需拼接范围:若是则完成拼接;否则更新i=i 1,重复执行所述拼接步骤直至当前已拼接区域达到需拼接范围为止。8.根据权利要求7所述的一种平面编码靶标的二维图像拼接系统的拼接方法,其特征在于,所述坐标系建立步骤和所述拼接原点设定步骤之间还包括安装偏差校正步骤:步骤a1,通过所述第一xy运动平台和第二xy运动平台的运动带动所述编码靶标固定基座移动至所述第一图像采集装置的视场下,所述第一图像采集装置采集所述平面编码靶标的第一图像作为第一校正图像;步骤a2,通过所述第二xy运动平台带动所述编码靶标固定基座移动至所述第二图像采集装置的视场下,所述第二图像采集装置采集所述平面编码靶标的第二图像作为第二校正图像;步骤a3,所述数据处理装置提取所述第一校正图像中某一个编码单元在数值序列容器
的记录,建立所述第一校正图像的第一校正图像坐标系;和提取所述第二校正图像中某一个编码单元在数值序列容器的记录,建立所述第二校正图像的第二校正图像坐标系;步骤a4,所述数据处理装置计算出所述第一校正图像坐标系和所述平面编码靶标坐标系o
t-x
t
y
t
之间的夹角β1,和所述第二校正图像坐标系和所述平面编码靶标坐标系o
t-x
t
y
t
之间的夹角β2;步骤a5,通过采集第一校正图像上的某一个编码单元的中心编码点或平常编码点的像素坐标以及实际的物理坐标对第一图像采集装置进行标定,获得所述第一图像采集装置的比例尺ρ1;和通过采集第二校正图像上的某一个编码单元的中心编码点或平常编码点的像素坐标以及实际的物理坐标对第二图像采集装置进行标定,获得所述第二图像采集装置的比例尺ρ2。9.根据权利要求8所述的一种平面编码靶标的二维图像拼接系统的拼接方法,其特征在于,所述拼接步骤和判断步骤具体为:步骤b1,所述第一xy运动平台和第二xy运动平台配合进行步进扫描;步骤b2,同时触发所述第一图像采集装置和所述第二图像采集装置采集图像,获得第i次采集图像对,i>1,且i∈z;步骤b3,所述数据处理装置提取所述第i次采集图像对中的第一图像中某一个编码单元的中心编码点在第一图像坐标系o-u
1v1
的坐标(u
i
,v
i
),和提取该编码单元在数值序列容器的记录,得到该编码单元在平面编码靶标坐标系o
t-x
t
y
t
的坐标(x
i
,y
i
);计算所述第i次采集图像对中的第一图像的图像中心位于所述平面编码靶标坐标系o
t-x
t
y
t
的坐标(x
′
i
,y
′
i
)为:步骤b4,计算第i次采集图像对中的第二图像的位于所述拼接图像坐标系的坐标(x
″
i
,y
″
i
)为:步骤b5,根据所述坐标(x
″
i
,y
″
i
)将所述第i次采集图像对中的第二图像拼接至所述拼接图像坐标系的坐标(x
″
i
,y
″
i
)处;步骤b6,判断当前已拼接区域是否达到需拼接范围:若是则完成拼接;否则更新i=i 1,重复执行所述步骤b2至b5直至当前已拼接区域达到需拼接范围为止。10.根据权利要求6所述的一种平面编码靶标的二维图像拼接系统的拼接方法,其特征在于,所述靶标生成步骤具体包括:步骤c1,确定所述编码子区域和定位区域的边长l、构造半径r、编码点图案的种类、定位点图案的种类和定位点分布样式;步骤c2,根据构造半径r,构造所述中心编码点和每个所述平常编码点于所述编码单元的分布,按照预设的采样顺序,给所述中心编码点和每个所述平常编码点分别标上唯一的
编码序号;步骤c3,选定定位点分布样式为序号第m0种,生成第一个所述编码单元,并获取第一个所述编码单元的编码数值序列[v
0,0
,v
0,1
,
…
,v
0,k-2
,v
0,k-1
]和校验数值序列并将平面编码靶标坐标系o
t-x
t
y
t
的基准坐标设置于第一个所述编码单元的编码单元坐标系;步骤c4,所述数值序列容器记录并储存第一个所述编码单元的在所述平面编码靶标坐标系o
t-x
t
y
t
上的坐标(x0,y0)、编码数值序列[v
0,0
,v
0,1
,
…
,v
0,k-2
,v
0,k-1
]、定位点分布样式的序号m0和校验数值序列然后根据选定的编码点图案的种类和定位点图案的种类绘制第一个所述编码单元的图案;步骤c5,向邻近未编码区域拓展其他编码单元来扩大编码区域,并选定定位点分布样式为序号第m
n
种,0≤m
n
≤m-1;步骤c6,为新拓展的编码单元的中心编码点和每个所述平常编码点分别生成对应的编码数值,形成新拓展的编码单元的编码数值序列[v
n,0
,v
n,1
,
…
,v
n,k-2
,v
n,k-1
];步骤c7,检测编码数值序列[v
n,0
,v
n,1
,
…
,v
n,k-2
,v
n,k-1
]在数值序列容器中是否唯一:是则执行步骤c8,否则重新执行所述步骤c6;步骤c8,计算新拓展的编码单元的校验数值序列然后所述数值序列容器记录并储存新拓展的编码单元的在所述平面编码靶标坐标系o
t-x
t
y
t
上的坐标(x
n
,y
n
)、编码数值序列[v
n,0
,v
n,1
,
…
,v
n,k-2
,v
n,k-1
]、定位点分布样式的序号m
n
和校验数值序列然后根据选定的编码点图案的种类和定位点图案的种类绘制新拓展的编码单元的图案;步骤c9,检测当前所有编码单元的覆盖范围是否达到所述平面编码靶标的需编码范围:若不是则更新n=n 1,并重新执行步骤c5至步骤c8;若是则完成所述靶标生成步骤。
技术总结
本发明公开了一种平面编码靶标及应用其的图像拼接系统、方法,包括多个呈阵列分布的编码单元,所述编码单元包括一个中心编码点、多个平常编码点和至少一个定位点,所述定位点的定位点分布样式用于确定所述中心编码点和所述平常编码点在所述编码单元坐标系的坐标;各个所述编码单元编码数值序列互不相同且唯一。平面编码靶标,可实现大面积编码和定位功能,应用平面编码靶标的图像拼接系统,能解决因拼接位置识别错误导致的拼接错误和误差累计问题,实现大范围、高精度和耗时短的二维图像拼接。像拼接。像拼接。
技术研发人员:高健 魏远洋 张揽宇 邓海祥 陈云 陈新
受保护的技术使用者:广东工业大学
技术研发日:2021.12.31
技术公布日:2022/4/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。