1.本发明涉及移动机器人技术领域,具体为一种移动机器人工业互联网控制系统。
背景技术:
2.实现制造业数字化、智能化、协同化的目标需要各种软件、自动化设备、工业机器人、移动机器人的参与,其中移动机器人是目前科学技术发展最活跃的领域之一。
3.现有的移动机器人控制系统不能够很好的对移动机器人进行行径路线的规划,且不能够实现机器人厂商的异地协同管理。
4.针对上述问题,本发明提供了一种移动机器人工业互联网控制系统。
技术实现要素:
5.本发明的目的在于提供一种移动机器人工业互联网控制系统,包括主控单元和用于移动机器人的数据采集单元,主控单元与数据采集单元均将信息传输至云端,用户端实时对云端存储的信息进行查阅,从而解决背景技术中的问题。
6.为实现上述目的,本发明提供如下技术方案:一种移动机器人工业互联网控制系统,包括主控单元和用于移动机器人的数据采集单元,主控单元与数据采集单元无线连接,数据采集单元将移动机器人的行径信息传输给主控单元,主控单元对移动机器人进行移动路径进行远程调控,且主控单元与数据采集单元均将信息传输至云端,用户端实时对云端存储的信息进行查阅。
7.优选地,主控单元包括用于控制移动机器人的m 智能制造中枢控制系统和对移动机器人的行径进行计算的m 机器人算法调度系统,并设置有m 机器人设备控制对接系统用于接收和传输信号,且还设置有用于现场操控及远程管理的m 智能制造协同作业系统和m 机器人交通控制系统。
8.优选地,数据采集单元设置有安装在移动机器人上的硬件设备和用于传输数据的4g/5g通信数据通道,4g/5g通信数据通道将采集的数据传输给m 机器人设备控制对接系统。
9.优选地,硬件设备包括用于拍摄行径路况的摄像头和用于检测距离的测距传感器,且在硬件设备上均设置有soc模块、5g通讯模块和wifi模块。
10.优选地,硬件设备通过5g通讯模块将数据信息传输至云端,通过wifi模块进行网络连接。
11.与现有技术相比,本发明的有益效果如下:
12.本发明提供的一种移动机器人工业互联网控制系统,通过嵌入式数据采集终端收集移动机器人的实时位置、设备状况等数据,通过4g/5g通信数据通道将数据传输至主控单元,结合m 智能制造中枢控制系统、m 智能制造协同作业系统、m 机器人交通控制系统、m 机器人算法调度系统及m 机器人设备控制对接系统等技术,实现移动机器人的合理路径调度,远程监视实现机器人实时可视化,提高故障解决速度,降低非预测性停机30%以上,提
高机器人有效工作效率,提升机器人稳定性。
13.本发明提供的一种移动机器人工业互联网控制系统,将硬件设备通过5g通讯模块将数据信息传输至云端,且用户端实时对云端存储的信息进行查阅,实现数据信息在移动机器人销售、租赁、作业、售后等全过程的充分利用,帮助移动机器人厂商异地协同,有效管控机器人,提高远程服务能力,远程维护功能快速定位和解决故障,降低故障处理时间82%,提高故障一次性修复率40%,节省差旅成本50%;采用边缘计算、规则引擎;终端数据在上云外还具备数据本地存储的功能,能够根据现场需要存储一周以内的设备参数信息。并能够根据设备突发故障,实现对设备的反向控制。
附图说明
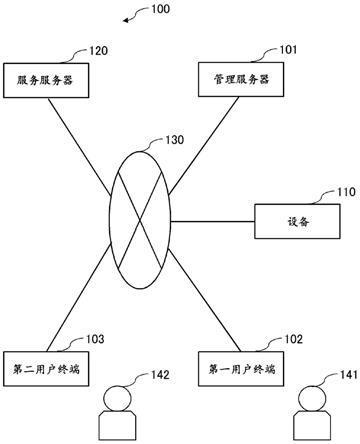
14.图1为本发明的整体模块图;
15.图2为本发明的主控单元与数据采集单元的模块图。
具体实施方式
16.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
17.请参阅图1-2,一种移动机器人工业互联网控制系统,包括主控单元1和用于移动机器人的数据采集单元2,主控单元1与数据采集单元2无线连接,数据采集单元2将移动机器人的行径信息传输给主控单元1,主控单元1对移动机器人进行移动路径进行远程调控,且主控单元1与数据采集单元2均将信息传输至云端,用户端实时对云端存储的信息进行查阅。
18.主控单元1包括用于控制移动机器人的m 智能制造中枢控制系统和对移动机器人的行径进行计算的m 机器人算法调度系统,并设置有m 机器人设备控制对接系统用于接收和传输信号,通过接收业务工单、结合实时库存、根据产线原材料耗用量和成品产出量、采集机器人实时体征数据。通过中枢平台核心任务算法,拆解产品生产工单,结合库存生成备料单据,根据产线需求生产派送单,自动调配机器人执行物料搬运,无人化协作配套设备搭载、让行机器人等,实现业务不中断热插拔式等移动机器人多层次导入,实现产品制程、设备等智能化有序升级,优化人员及作业环。
19.还设置有用于现场操控及远程管理的m 智能制造协同作业系统和m 机器人交通控制系统,通过嵌入式数据采集终端收集移动机器人的实时位置、设备状况等数据,通过4g/5g通信数据通道将数据传输至主控单元,结合m 智能制造中枢控制系统、m 智能制造协同作业系统、m 机器人交通控制系统、m 机器人算法调度系统及m 机器人设备控制对接系统等技术,实现移动机器人的合理路径调度。
20.通过m 智能制造协同作业系统接入无人车、电梯、自动门、产线机器人、生产机器接驳台等生产配套设备,在移动机器人执行搬运作业时,根据机器人通行路线和实施状态,协作配套设备有效配合接驳、搭载、让行等无人化作业,实现物料被有序传递和产品生产。
21.通过m 机器人交通控制系统从全局视角规划机器人搬运路径,实现多种机器人红
绿灯式交通管控,在厂域有限通道和交叉路口内流畅通行。
22.通过m 机器人算法调度系统有效实现二维码、激光slam、激光反光板、3d 激光slam等不同导航方式的机器人在同一个厂域内被统一管理,能根据生产业务需要,合理调度机器人接受搬运任务。
23.通过m 机器人设备控制对接系统的底层协议,对接数据采集终端、潜入搬运/牵引、滚筒、叉车和复合型等各类机器人。
24.数据采集单元2设置有安装在移动机器人上的硬件设备和用于传输数据的4g/5g通信数据通道,4g/5g通信数据通道将采集的数据传输给m 机器人设备控制对接系统。
25.硬件设备包括用于拍摄行径路况的摄像头和用于检测距离的测距传感器,且在硬件设备上均设置有soc模块、5g通讯模块和wifi模块,硬件设备通过5g通讯模块将数据信息传输至云端,通过wifi模块进行网络连接,将硬件设备通过5g通讯模块将数据信息传输至云端,且用户端实时对云端存储的信息进行查阅,实现数据信息在移动机器人销售、租赁、作业、售后等全过程的充分利用,帮助移动机器人厂商异地协同,有效管控机器人,提高远程服务能力。
26.综上所述:本发明提供了一种移动机器人工业互联网控制系统,通过嵌入式数据采集终端收集移动机器人的实时位置、设备状况等数据,通过4g/5g通信数据通道将数据传输至主控单元,结合m 智能制造中枢控制系统、m 智能制造协同作业系统、m 机器人交通控制系统、m 机器人算法调度系统及m 机器人设备控制对接系统等技术,实现移动机器人的合理路径调度;将硬件设备通过5g通讯模块将数据信息传输至云端,且用户端实时对云端存储的信息进行查阅,实现数据信息在移动机器人销售、租赁、作业、售后等全过程的充分利用,帮助移动机器人厂商异地协同,有效管控机器人,提高远程服务能力。
27.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
28.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。