1.本实用新型涉及电梯技术领域,更具体地说,它涉及一种电梯导轨垂直度检测工装。
背景技术:
2.电梯包括轿厢、导轨和对重。电梯的安装之前需要安装导轨,然后对导轨的扭转、直线度和垂直度矫正,最后安装轿厢等。
3.现有的导轨的垂直度的矫正采用线锤,参见图1,线锤3伸入井道中并沿重力的方向设置,在安装导轨1时,将导轨1与线锤3一边对照一边安装至导轨支架2上,但是这种垂直度检测方法误差较大,而且增加导轨安装的难度,因此,需要精确地检测导轨的垂直度的工装。
技术实现要素:
4.针对现有技术存在的不足,本实用新型的目的在于提供一种电梯导轨垂直度检测工装,具有检测铺装后的导轨的垂直度准确度高的优点。
5.为实现上述目的,本实用新型提供了如下技术方案:
6.一种电梯导轨垂直度检测工装,包括滑移连接于导轨的第二滑块、与所述第二滑块可拆卸连接的第一滑块和用于驱动所述第一滑块沿导轨滑移的牵引组件,所述牵引组件设置于井道中;所述第一滑块与第二滑块之间设有压力传感器,以测量所述第一滑块与第二滑块之间的压力;所述井道中设有垂直导向组件,所述垂直导向组件用于牵引所述第一滑块沿重力的方向滑移,并使所述第一滑块压向第二滑块。
7.采用上述技术方案,将第二滑块安装至导轨上,垂直导向组件将第一滑块引导向重力的方向,并将第一滑块压向第二滑块,牵引组件驱动第一滑块滑移,使第一滑块带动第二滑块在导轨上滑移,在第一滑块和第二滑块滑移的过程中,压力传感器测量第一滑块和第二滑块之间的压力变化,由于导轨与重力方向有偏差,导致第一滑块与第二滑块之间的压力有变化,根据压力传感器的变化值,即可推断出导轨的垂直度的误差,若压力传感器值变化过大,可在压力传感器变化值较大的地方重新调整导轨的垂直度,相比于使用线锤目测对比导轨与线,即导轨与重力方向之间的距离准确度更高。
8.进一步,所述垂直导向组件包括与第一滑块滑动连接的张紧绳、可拆卸连接于井道的底部的锤块和用于为张紧绳提供张紧力的张紧组件,所述张紧组件设置于井道的顶部,所述张紧绳的远离张紧组件的一端与锤块固定连接。
9.采用上述技术方案,将带有锤块的张紧绳从井道的顶部自然垂落至井道的底部,直到张紧绳稳定后,将锤块固定在井道的底部,张紧组件将张紧绳张紧,使第一滑块在滑移的过程中始终与第二滑块之间压紧,保证第一滑块压向第二滑块有效,从而使压力传感器的测量数据准确,提高工装测量的准确性。
10.进一步,所述张紧组件包括转动连接于井道的张紧卷筒、与张紧卷筒连接的手柄
和用于防止张紧卷筒自动反转的蜗轮蜗杆组件,所述蜗轮蜗杆组件设置于手柄与张紧卷筒之间,所述张紧绳缠绕于张紧卷筒。
11.采用上述技术方案,手握手柄,转动张紧卷筒,方便张紧卷筒的转动。张紧卷筒转动,使张紧绳缠绕于张紧卷筒上,使张紧绳的拉紧,实现张紧绳中有张紧力,从而实现第一滑块压向第二滑块,结构简单,易于制造。在张紧绳的张紧力足够时,松开手柄,蜗轮蜗杆组件具有自锁的特性,保证张紧卷筒自动反转,防止张紧绳由于张紧力将张紧卷筒反转,维持张紧绳中的张紧力,使第一滑块始终压向第二滑块,使压力传感器的测量数据准确。
12.进一步,所述蜗轮蜗杆组件包括与张紧卷筒同轴地固定连接的蜗轮和与蜗轮啮合的蜗杆,所述蜗杆与手柄固定连接。
13.采用上述技术方案,手柄带动蜗杆正向或反向转动,蜗杆依次带动蜗轮和张紧卷筒正向或反向转动,实现张紧绳的张紧或松开,当手柄不转动时,张紧绳中具有张紧力时,张紧绳拉动张紧卷筒转动,张紧卷筒有带动蜗轮转动的趋势,由于蜗轮蜗杆之间的自锁特性,蜗杆不会跟随蜗轮转动,使张紧卷筒不会移动,实现张紧绳中的张紧力不变,结构简单,易于实现,增加工装的实用性。
14.进一步,所述张紧绳连接有用于测量张紧绳所受张紧力的拉力计。
15.采用上述技术方案,拉力计测量张紧绳中的的张紧力,一方面,避免张紧力过大使张紧绳断裂,保护张紧绳,增加工装的安全性,另一方面,使张紧绳的张紧力不会过小,保证第一滑块压向第二滑块的压力足够,从而使压力传感器的测量数据准确。
16.进一步,所述牵引组件包括转动连接于井道的顶部的牵引卷筒、用于驱动牵引卷筒转动的牵引动力源和一端与第一滑块固定连接的牵引绳,所述牵引绳的另一端缠绕于牵引卷筒。
17.采用上述技术方案,牵引动力源驱动牵引卷筒转动,牵引卷筒拉动牵引绳,使牵引绳缠绕于牵引卷筒上,牵引绳拉动第一滑块,使第一滑块带动第二滑块沿导轨滑移,实现压力传感器的压力数值变化。
18.进一步,所述牵引卷筒连接有橡胶弹性体联轴器,所述牵引动力源与牵引卷筒之间通过橡胶弹性体联轴器连接。
19.采用上述技术方案,橡胶弹性体联轴器具有弹性,缓冲牵引动力源对牵引卷筒的冲击和振动,保证牵引卷筒在拉动牵引绳的过程中稳定,从而使第一滑块和第二滑块的滑移稳定,使压力传感器的测量数据不被牵引动力源影响,提高工装测量的准确性。
20.进一步,所述牵引卷筒设有用于测量牵引卷筒的转动角度的转角测量仪。
21.采用上述技术方案,转角测量仪测量牵引卷筒的转动角度,根据牵引卷筒的直径,即可推出牵引绳的移动距离,结合压力传感器的压力值,可知道导轨的具体位置的垂直度,方便导轨的垂直度的调整,增加工装的实用性。再根据牵引卷筒的转动时间,即可推出牵引绳的移动速度,方便控制和监控牵引绳的移动速度,增加工装测量的可控性和精确性。
22.综上所述,本实用新型具有以下有益效果:
23.1.张紧绳由锤块导向重力的方向,保证张紧绳的垂直度,以张紧绳为基准,测量滑动于张紧绳的第一滑块与滑动于导轨的第二滑块之间的压力,若压力变小,说明导轨相对于重力方向偏向朝远离张紧绳的方向,若压力变大,说明导轨相对于重力方向偏向朝靠近张紧绳的方向,工装的结构简单,易于制作,相比较于反复用垂直仪目测的方法更方便;
24.2.张紧组件拉紧张紧绳,使第一滑块在张紧绳上滑移的过程中,张紧绳的形变尽可能地小,保证第一滑块与第二滑块之间的压紧力准确反应导轨相对于张紧绳之间的距离偏差,使工装测量准确;
25.3.牵引动力源自动牵引第一滑块,使工装自动化,使用方便。
附图说明
26.图1为背景技术中电梯的导轨的示意图;
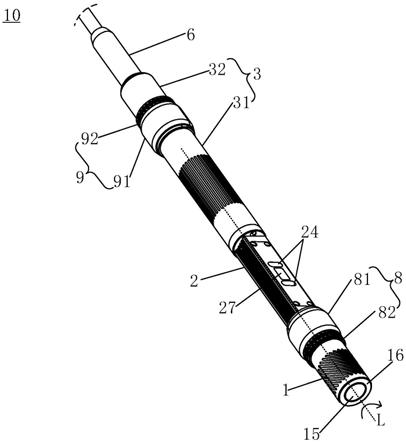
27.图2为本实施例的剖视图;
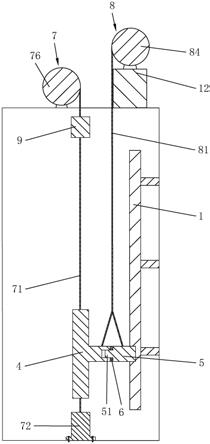
28.图3为本实施例的侧面结构示意图。
29.图中:1、导轨;2、导轨支架;3、线锤;4、第一滑块;5、第二滑块;51、凸块;6、压力传感器;7、垂直导向组件;71、张紧绳;72、锤块;73、蜗轮;74、蜗杆;75、手柄;76、张紧卷筒;8、牵引组件;81、牵引绳;82、牵引动力源;83、橡胶弹性体联轴器;84、牵引卷筒;9、拉力计;10、转角测量仪;11、滚轮;12、支架。
具体实施方式
30.下面结合附图及实施例,对本实用新型进行详细描述。
31.本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
32.一种电梯导轨垂直度检测工装,参见图2,包括固定连接于井道顶部的支架12、张紧卷筒76、牵引卷筒84、牵引绳81和张紧绳71。张紧卷筒76和牵引卷筒84均转动连接于支架12且轴线均沿水平方向设置。
33.参见图2和图3,张紧绳71的延伸入井道内部的一端固定连接有锤块72,张紧绳71的另一端固定连接于张紧卷筒76的中部,并且张紧绳71缠绕于张紧卷筒76上。锤块72螺栓连接于井道的底部。张紧绳71滑移连接有第一滑块4,第一滑块4设有沿重力方向设置的滑槽,滑槽的两个槽侧面分别转动连接有8个滚轮11,滚轮11的轴线沿垂直于重力的方向设置。两排滚轮11相对设置,张紧绳71位于滚轮11的轮面与滑槽的槽底面之间,保证第一滑块4不易从张紧绳71中松脱出。张紧卷筒76的轴心处固定连接有蜗轮73,蜗轮73与张紧卷筒76同轴,蜗轮73啮合有蜗杆74,蜗杆74的轴线与张紧卷筒76平行,蜗轮73和蜗杆74均转动连接于支架12。蜗杆74的远离张紧卷筒76的一端固定连接有手柄75。
34.参见图2和图3,牵引绳81的延伸入井道内部的一端固定连接有第二滑块5,牵引绳81的另一端固定连接于牵引卷筒84的中部,并且牵引绳81缠绕于牵引卷筒84上。第二滑块5设有滑槽,导轨1穿过第二滑块5的滑槽,使第二滑块5在导轨1上滑移。牵引卷筒84的轴心处固定连接有橡胶弹性体联轴器83,橡胶弹性体联轴器83采用米思米品牌中型号为shr的橡胶弹性体联轴器83,橡胶弹性体联轴器83的远离牵引卷筒84的一端连接有牵引动力源82,牵引动力源82采用旋转电机,旋转电机的机身固定连接于支架12,旋转电机的输出轴与橡胶弹性体联轴器83的一端固定连接,旋转电机的输出轴、橡胶弹性体联轴器83和牵引卷筒84同轴。
35.参见图2,第一滑块4设有凹槽,第二滑块5固定设有延伸入第一滑槽的凹槽的凸块
51,凸块51的侧面与第一滑槽的凹槽的槽侧面之间极小间隙配合,凸块51的远离第二滑块5的一侧与第一滑块4的凹槽的槽底面之间留有间隙。第一滑块4与第二滑块5之间设有压力传感器6,压力传感器6粘贴至第二滑块5。牵引绳81的靠近第二滑块5的一端分为两段等长的枝杈,两个枝杈的靠近井道底部的一端分别与第一滑块4和第二滑块5的侧面固定连接,保证第一滑块4和第二滑块5同时被拉动。
36.参见图2和图3,张紧绳71的靠近张紧卷筒76的一端连接有用于测量张紧绳71所受张紧力的拉力计9,拉力计9的测量端与张紧绳71固定连接。牵引卷筒84设有用于测量牵引卷筒84的转动角度的转角测量仪10,转角测量仪10固定连接于支架12。
37.参见图2和图3,工作步骤:导轨1在井道中铺装好后,将锤块72自由垂下至井道的底部,待锤块72稳定后,使用螺栓将锤块72固定连接在井道底部,保证张紧绳71沿重力方向设置。将第二滑块5装至导轨1并滑移至井道的底部。将第一滑块4装至张紧绳71并滑移至井道的底部,将第二滑块5的凸块51插入第一滑块4的凹槽中。手动转动手柄75,手柄75带动蜗杆74转动,蜗杆74依次带动蜗轮73和张紧卷筒76转动,张紧绳71被拉紧,一边观察拉力计9的传送出的数据,一边转动手柄75,直到拉力计9显示的张紧绳71的张紧力符合规定值,停止转动手柄75。启动旋转电机,旋转电机的输出轴依次带动橡胶弹性体联轴器83和牵引卷筒84转动,牵引卷筒84拉动牵引绳81,牵引绳81的枝杈的一端同时拉动第一滑块4和第二滑块5,使第一滑块4和第二滑块5分别在张紧绳71和导轨1上匀速滑移,记录压力传感器6和转角测量仪10传送出数据,直到第二滑块5走过整个导轨1,完成检测,分析数据,根据数据调整导轨1,再反向转动手柄75,将张紧绳71的张紧力松掉,将第一滑块4和第二滑块5快速移动至井道的底部,再正向转动手柄75,循环上述步骤。
38.以上所述仅是本实用新型的优选实施方式,本实用新型的保护范围并不仅局限于上述实施例,凡属于本实用新型思路下的技术方案均属于本实用新型的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理前提下的若干改进和润饰,这些改进和润饰也应视为本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。