1.本实用新型属于清扫机器人技术领域,尤其涉及一种光伏清扫机器人控制系统。
背景技术:
2.扫地机器人,又称自动打扫机、智能吸尘、机器人吸尘器等,是智能家用电器的一种,能凭借一定的人工智能,自动在房间内完成地板清理工作,一般采用刷扫和真空方式,将地面杂物先吸纳进入自身的垃圾收纳盒,从而完成地面清理的功能,一般来说,将完成清扫、吸尘、擦地工作的机器人。
3.光伏清扫机器人在工作的过程中采用智能控制板对其进行制定输送,从而实现各部分机械构建的通路与闭合,从而进行智能控制,但是传统的智能控制箱结构密闭,无法进行自由开合,在修理和维护的时候较为麻烦,而且内部元器件的工作将会生产热量,需要进行散热,我们提出来一种光伏清扫机器人控制系统解决上述问题。
技术实现要素:
4.针对上述问题,本实用新型提供一种光伏清扫机器人控制系统,其通过设置提升机构,在光伏清扫机器人工作的过程中,将会通过智能控制箱内部的智能元器件进行系统控制,电子元器件在工作的时候会产生热量,此时便可以通过驱动马达带动转盘进行转动,转盘转动的时候将会带动支撑杆围绕转盘的圆心作圆周运动,此时由于滑槽的限位作用,将会使得活动安装于滑块外侧的支撑杆向左侧移动,便可以推动活动杆向上抬起,从而推动顶盖打开,在需要散热的时候,或者对智能控制元件清灰修理的时候,自动打开,方便快捷,并且在上述过程完成之后自动闭合,避免大量灰尘进入,从而增加光伏清扫机器人的使用寿命。
5.为了实现上述目的,本实用新型采用了如下技术方案:
6.一种光伏清扫机器人控制系统,包括智能控制箱,所述智能控制箱的顶部活动安装有顶盖,所述顶盖的顶部开设有均匀分布的散热孔,所述顶盖的左右两侧均开设有安装槽,所述顶盖的左右两侧均活动安装有连接轴,两个所述安装槽的内部均活动安装有提升机构;
7.所述提升机构包括活动安装于两个安装槽内部的活动杆,所述活动杆的正面滑动安装有支撑杆,所述活动杆的左端固定安装有与安装槽内壁活动安装有安装轴,所述活动杆的正面开设有滑槽,所述滑槽的内部滑动安装有滑块,所述控制箱内部的左右两侧均固定安装有驱动马达,两个所述驱动马达输出轴处均固定安装有转盘,所述转盘的正面活动安装有插轴。
8.优选地,所述顶盖的面积不大于智能控制箱的面积,所述智能控制箱的顶部开设有与顶盖相适配的开口。
9.优选地,所述连接轴位于安装槽的前侧,且两个连接轴的底端均与智能控制箱固定连接。
10.优选地,所述活动杆的长度不大于安装槽的长度,所述支撑杆的顶端通过滑块与滑槽滑动连接。
11.优选地,所述支撑杆的底端通过插轴与转盘活动连接,所述转盘为半圆形。
12.优选地,所述支撑杆的底端延伸至智能控制箱的内部,所述转盘与活动杆相互平行,所述支撑杆与活动杆之间的夹角不小于三十度。
13.与现有技术相比,本实用新型的有益效果为:
14.1、通过设置提升机构,在光伏清扫机器人工作的过程中,将会通过智能控制箱内部的智能元器件进行系统控制,电子元器件在工作的时候会产生热量,此时便可以通过驱动马达带动转盘进行转动,转盘转动的时候将会带动支撑杆围绕转盘的圆心作圆周运动,此时由于滑槽的限位作用,将会使得活动安装于滑块外侧的支撑杆向左侧移动,便可以推动活动杆向上抬起,从而推动顶盖打开,在需要散热的时候,或者对智能控制元件清灰修理的时候,自动打开,方便快捷,并且在上述过程完成之后自动闭合,避免大量灰尘进入,从而增加光伏清扫机器人的使用寿命;
15.2、通过设置顶盖,顶盖可实现自动开合,并且在顶盖上开设散热孔及时对智能控制箱内部进行通风换气,将热空气排出,进行散热,连接轴用于对顶盖的支撑,让顶盖在打开的时候围绕其进行转动,方便使用者使用。
附图说明
16.图1为本实用新型提出的一种光伏清扫机器人控制系统的结构示意图;
17.图2为本实用新型提出的一种光伏清扫机器人控制系统结构示意图;
18.图3为本实用新型提出的一种光伏清扫机器人控制系统结构示意图;
19.图4为本实用新型提出的一种光伏清扫机器人控制系统结构示意图
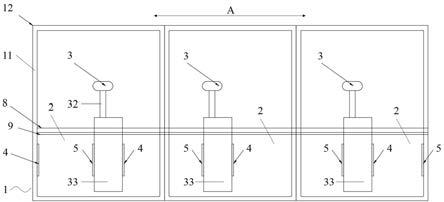
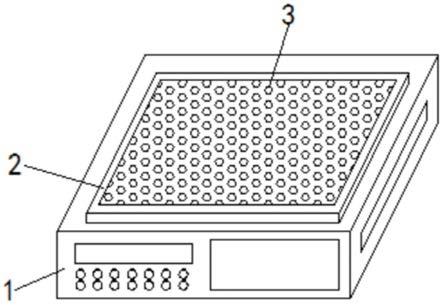
20.图中:1智能控制箱、2顶盖、3散热孔、4安装槽、5连接轴、7提升机构、701活动杆、702支撑杆、703安装轴、704滑槽、705滑块、706驱动马达、707转盘、708插轴。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
22.参照图图1、图2、图3和图4,一种光伏清扫机器人控制系统,包括智能控制箱1,智能控制箱1的顶部活动安装有顶盖2,顶盖2的顶部开设有均匀分布的散热孔3,顶盖2的左右两侧均开设有安装槽4,顶盖2的左右两侧均活动安装有连接轴5,两个安装槽4的内部均活动安装有提升机构7;
23.提升机构7包括活动安装于两个安装槽4内部的活动杆701,活动杆701的正面滑动安装有支撑杆702,活动杆701的左端固定安装有与安装槽4内壁活动安装有安装轴703,活动杆701的正面开设有滑槽704,滑槽704的内部滑动安装有滑块705,控制箱1内部的左右两侧均固定安装有驱动马达706,两个驱动马达706输出轴处均固定安装有转盘707,转盘707的正面活动安装有插轴708。
24.在图1中,顶盖2的设计小于智能控制箱1,在顶盖2盖于智能控制箱1的顶部,在需
要对其内部进行散热、清灰和维修的时候自动打开,方便快捷。
25.在图2和图3中,把连接轴5设计在安装槽4的内部,采用连接轴5来对顶盖2进行支撑,保证顶盖2在转动的时候由支撑点,以辅助其完成自动张开或者闭合。
26.在3和图4中,活动杆701倾斜安装于安装槽4的内部,活动杆701的长度略小于安装槽4的长度,在其角度发生改变之后不会与安装槽4的内壁接触,避免出现卡死的情况。
27.在图3和图4中,支撑杆702的顶端活动安装于滑块705的外侧,支撑杆702的底端活动安装于转盘707的外侧,将滑块705和转盘707放置于同一侧,在工作的时候不会出现相互交叉卡死的现象。
28.现对本实用新型的操作原理做如下描述:
29.顶盖2可实现自动开合,并且在顶盖2上开设散热孔4及时对智能控制箱1内部进行通风换气,将热空气排出,进行散热,连接轴5用于对顶盖2的支撑,让顶盖2在打开的时候围绕其进行转动,在光伏清扫机器人工作的过程中,将会通过智能控制箱1内部的智能元器件进行系统控制,电子元器件在工作的时候会产生热量,此时便可以通过驱动马达706带动转盘707进行转动,转盘707转动的时候将会带动支撑杆702围绕转盘707的圆心作圆周运动,此时由于滑槽704的限位作用,将会使得活动安装于滑块705外侧的支撑杆702向左侧移动,便可以推动活动杆701向上抬起,从而推动顶盖2打开,在需要散热的时候,或者对智能控制元件清灰修理的时候,自动打开。
30.在使用中,将会通过智能控制箱1内部的智能元器件进行系统控制,电子元器件在工作的时候会产生热量,此时便可以通过驱动马达706带动转盘707进行转动,转盘707转动的时候将会带动支撑杆702围绕转盘707的圆心作圆周运动,此时由于滑槽704的限位作用,将会使得活动安装于滑块705外侧的支撑杆702向左侧移动,便可以推动活动杆701向上抬起,从而推动顶盖2打开,在需要散热的时候,或者对智能控制元件清灰修理的时候,自动打开,方便快捷,并且在上述过程完成之后自动闭合,避免大量灰尘进入,从而增加光伏清扫机器人的使用寿命。
31.以上,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。