1.本实用新型属于半导体器件清洗技术领域,更具体地说,是涉及一种尤其适用于半导体器件的自动清洗设备的防撞保护结构。
背景技术:
2.现有的半导体行业对半导体器件的清洗作业环节中,是通过清洗设备对半导体器件进行清洗,清洗设备具体通常为通过至少两个机械手来实现对半导体器件的抓取及搬运,半导体器件包括硅片、晶圆等,机械手沿一定路径运动,
3.若相邻的机械手正在进行相互靠近的运动,若操作人员或者其它物体进入相邻的两个机械手之间的区域,易造成人员受伤、物体损失,同时影响了清洗设备的正常运行和生产效率。
技术实现要素:
4.本实用新型为了解决现有的半导体器件的自动清洗设备易出现造成人员受伤、物体损失的现象,同时影响了清洗设备正常运行和生产效率的技术问题,提出一种适用于半导体器件的自动清洗设备的防撞保护结构。
5.为解决以上问题,本实用新型采用的技术方案是:提出一种自动清洗设备的防撞保护结构,包括:
6.设备本体,该设备本体包括:
7.沿第一方向水平设置的至少一个槽体;
8.至少两个搬移机构,并排设置在槽体一侧,沿第一方向水平运动;
9.其中,在相邻的两个搬移机构之间设置有一红外对射感应装置。
10.进一步地,设备本体还包括:沿第一方向延伸设置的机架,一对封板分别设置于机架在第一方向上的两端;
11.机架与封板构成一容纳空间,槽体设置在容纳空间内,搬移机构在容纳空间内运动;
12.至少一端的封板与相邻的搬移机构之间设置有另一红外对射感应装置。
13.进一步地,红外对射感应装置包括对应设置的红外发射装置和红外接收装置。
14.进一步地,设备本体还包括:工控机,与红外对射感应装置电连接。
15.进一步地,搬移机构包括:支撑柱,支撑柱上设有防护罩,在相邻的两个搬移机构之间,红外发射装置设置在一防护罩上,红外接收装置设置在另一防护罩上,红外发射装置与红外接收装置相对设置。
16.进一步地,还包括:
17.隔板,设于槽体与搬移机构之间,隔板沿第一方向延伸;
18.第一导轨,设于隔板远离槽体的板面上,第一导轨沿第一方向延伸;
19.驱动装置,设于搬移机构上,用于驱动搬移机构沿第一导轨运动。
20.进一步地,搬移机构上还设有滑块,与第一导轨相适配。
21.进一步地,自动清洗设备的防撞保护结构还包括位置感应器,用于限制搬移机构的运动极限位置,位置感应器包括限位感应片和限位感应器,限位感应片设置在搬移机构上,限位感应器设置在设备本体上。
22.进一步地, 限位感应片与搬移机构数量一一对应。
23.与现有技术相比,本实用新型提供的自动清洗设备的防撞保护结构通过在搬移机构与搬移机构、搬移机构与设备主体之间安装对应的红外发射装置和红外接收装置,构成多组红外对射感应装置,实现感应搬移机构与搬移机构、搬移机构与设备主体之间是否有物体或人员并在出现异常时反馈工控机控制搬移机构停止,从而实现半导体器件清洗作业过程对清洗设备、搬移机构及人员、物品安全提供保护。
附图说明
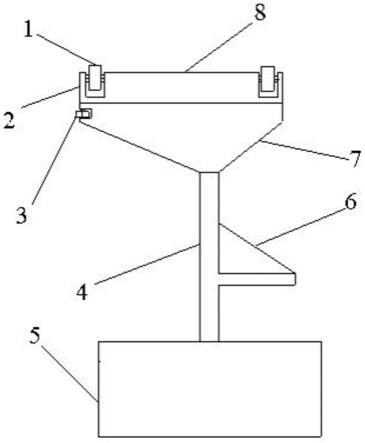
24.图1为本实用新型提供的自动清洗设备的防撞保护结构的正视图;
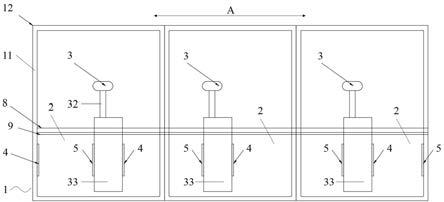
25.图2为本实用新型提供的自动清洗设备的防撞保护结构的侧视图。
26.其中,图中各附图主要标记:
27.1-设备本体;11-封板;12-机架;2-槽体;3-搬移机构;31-机械横臂;32-移载立柱;33-防护罩;34-驱动装置;4-红外发射装置;5-红外接收装置;6-清洗溶液;7-隔板;8-第一导轨;9-第一齿条。
28.其中,图中其它标记:
29.a-第一方向;b-第二方向;c-第一区域;d-第二区域;e-第三区域。
具体实施方式
30.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图1-2及实施例,对本实用新型进行进一步详细说明。
31.请一并参阅图1-2,本实用新型提供的自动清洗设备的防撞保护结构,包括:设备本体1,该设备本体1包括以下结构:
32.沿第一方向a水平设置的至少一个槽体2,该槽体2用于容纳清洗溶液6以清洗物件,该物件优选为电池板等半导体器件,同时,本实用新型提供的自动清洗设备的槽体2也可以用于清洗其它材料的物件;槽体2包括设于设备本体1上,该槽体2开有开口朝上的凹槽,该凹槽优选为矩形,也可以是梯形等其它形状,其尺寸及形状可根据待清洗的物件尺寸及形状进行调整。
33.本实施例中,还包括设于槽体2一侧的至少两个搬移机构3,该搬移机构3沿第一方向a水平运动。该第一方向a可以理解为与设备本体1的长度方向一致,即为设备本体1的长度方向。槽体2的一侧设有至少两个搬移机构3,优选为三个;设于设备本体1的工控机(图中未示出),用于控制搬移机构3和夹持装置的运动。
34.请参阅图1,在本实施例中,在相邻的两个搬移机构3之间设置有一红外对射感应装置。每个搬移机构3在平行于第一方向a的方向上的相对一端设有红外发射装置4,其另一端设有红外接收装置5。红外发射装置4和红外接收装置5与工控机电连接,相邻的搬移机构3之间通过相向设置的红外发射装置4和红外接收装置5构成该红外对射感应装置,并相互
通过发射和接收红外光线,以感测两个相邻的搬移机构3之间是否存在操作人员或其它物体,相互感应防止搬移机构3撞人或物体;若红外发射装置4和红外接收装置5之间感测到有人员或物体,则通过红外接收装置5反馈信号给工控机,工控机控制这两个相邻的搬移机构3停止运动,防止搬移机构3撞人或物体。
35.作为优选的实施方式,红外接收装置5设有声光警示装置,可以采用单独发出报警声的警笛,或单独发出警示灯光的警示灯,也可以采用同时具有声光警示功能的蜂鸣器。本实用新型提供的红外对射感应装置全名叫“主动红外入侵探测器”(active infrared intrusion detectors),其基本构造包括发射端(即红外发射装置4)、接收端(即红外接收装置5)、光束强度指示灯、光学透镜等。其侦测原理是将发射端的红外发光二极管发射的红外光线,经过光学透镜聚焦处理,使红外光线传输至较远距离,最后由接收端的光敏晶体管接收发射端发出的红外光线。当有物体挡住作为发射端的红外发射装置4发射的红外光线时,由于接收端无法接收到红外光线,则由作为接收端的红外接收装置5发出警报。
36.作为本实用新型提供的一种实施例,设备本体1包括:
37.沿第一方向a设置的机架12,一对封板11分别设置在机架12在第一方向a上的对应相对两端,该机架12与一对封板11构成容纳和支撑槽体2和搬移机构3的设备内部的容纳空间,槽体2设置在该容纳空间内,搬移机构3在该容纳空间内的槽体2一侧运动。该封板11作为设备主体的外侧封闭板,起到罩设和保护清洗设备,以及对搬移机构3的支撑和引导作用。其中一个封板11设有红外发射装置4,另一个封板11设有红外接收装置5。该机架12可以是一个整体框架,也可以由多个分体框架构成,多个分体框架之间可以是焊接而成,也可以是通过螺钉或螺栓连接。
38.作为优选的实施例,在第一方向a上的至少一端的封板11与相邻的搬移机构3之间设有另一红外对射感应装置。作为优选的实施方式,在第一方向a上的一端的其中一个封板11设有红外发射装置4,在第一方向a上的另一端的另一个封板11设有红外接收装置5;设备本体1和与其相邻的搬移机构3之间通过相向设置的红外发射装置4和红外接收装置5构成红外对射感应装置,并相互通过发射和接收红外光线,以感应设备本体1和与其相邻的搬移机构3之间是否存在操作人员或其它物体,若红外发射装置4和红外接收装置5之间感测到有人员或物体则通过感应器反馈信号给工控机,工控机控制该搬移机构3停止运动,从而起到防止搬移机构3撞人或物体,保护清洗设备、搬移机构3及人员、物品安全的作用。作为另一种实施方式,在第一方向a上的其中一端的封板11与相邻的搬移机构3之间设有另一红外对射感应装置。
39.作为优选的实施例,相邻的搬移机构3之间设置有第一位置传感器。每个搬移机构3在第一方向a上的相对一端设有限位感应片,其另一端设有限位感应器,相邻的搬移机构3之间通过相向设置的限位感应片和限位感应器构成第一位置传感器,即形成一限位开关装置。限位感应片和限位感应器与工控机电连接。
40.作为更优的实施例,在第一方向a上的至少一端的封板11与相邻的搬移机构3之间设有第二位置传感器。作为优选的实施方式,设备本体1在其中一个封板11上设有限位感应片,其另一端设有限位感应器;设备本体1和与其相邻的搬移机构3之间通过相向设置的限位感应片和限位感应器构成第二位置传感器,即形成另一限位开关装置。作为另一种实施方式,在第一方向a上的其中一端的封板11与相邻的搬移机构3之间设有第二位置传感器。
41.作为优选的实施方式,限位感应器设有声光警示装置。
42.当个相邻的搬移机构3之间或者两端的搬移机构3与设备主体的封板11之间组成的红外对射感应装置之间感测到有物体或操作人员,阻隔红外接收装置5接收红外发射器发送的红外光线时,感应器反馈工控机紧急制动对应的搬移机构3,并启动声光警示装置。当各组红外对射感应装置感测到各相邻搬移机构3之间或者两端的搬移机构3与设备主体的封板11之间没有物体或者操作人员时,搬移机构3正常运行,此时,相邻搬移机构3或搬移机构3与封板11之间使用限位开关装置来避免碰撞,具体地,
43.自动清洗设备的防撞保护结构还包括位置感应器,用于限制搬移机构的运动极限位置,位置感应器包括限位感应片和限位感应器,限位感应片设置在搬移机构3上,限位感应器设置在设备本体1上。进一步地, 限位感应片与搬移机构3数量一一对应。
44.设置位置感应器用于限制搬移机构3的沿第一方向上的活动路径,搬移机构3设置有限位感应片,当搬移机构3运动一段距离后,限位感应片碰触到限位感应器或者说是限位感应器被限位感应片阻隔,使位置感应器发出信号至工控机,工控机接到信号后控制对应的驱动装置停止运动,进而限制了限位搬移机构3的运动极限位置。
45.进一步地, 限位感应片与搬移机构3数量一一对应,以便对每个搬移机构3的运动路径实施限制,进而进一步保护搬移机构,防止运行过程中,互相干扰,互相碰撞。
46.具体地,例如一个搬移机构3上设有一个限位感应片,对应地,在设备本体上设有与一个限位感应片对应的两个限位感应器,用于限定搬移机构3两端的路径,限位感应器设置在设备本体上,可以设置在封板,或者是隔板,或者是第一导轨上,相应地限位感应片应设置在搬移机构3对应位置上,以便限位感应片和限位感应器可以配合,来限定搬移机构3的运动路径。
47.在本实施例中,防撞保护结构还包括:设于槽体2与搬移机构3之间、沿第一方向a设置的隔板7,设于隔板7远离槽体2的端面(板面)上的、平行于第一方向a水平设置的第一导轨8。作为其它的实施例,第一导轨8也可以直接设置在槽体2的槽体的一侧端面上,或者设于机架或凸台等结构上(图中未示出)。如图2所示,设备本体1内部通过隔板7被划分为第一区域c和第二区域d,其中第一区域c用于安装槽体2体及容纳待清洗物件及机械横臂31及其夹持装置;搬移机构3设置在隔板7远离槽体2的另一侧,即第二区域d;此外,槽体2远离隔板7的一侧为第三区域e,用于安装清洗设备的管路系统(图中未示出)、排风系统(图中未示出);驱动装置34,用于驱动搬移机构沿第一方向a水平运动和做靠近或远离槽体2的运动。
48.本实施例中,搬移机构3包括:移载立柱32、安装于移载立柱32上的机械横臂31,机械横臂31从移载立柱32延伸至槽体2上方。机械横臂31设有至少一个用于抓取或松开待清洗的物件的夹持装置。本实施例中,夹持装置可以通过气缸或电机驱动,利用夹爪机构的张合作用夹持或利用真空吸盘装置吸取物件。驱动装置包括:第一驱动机构,用于驱动移载立柱32、机械横臂31及第二驱动机构沿第一导轨8水平运动;第二驱动机构,用于驱动机械横臂31做靠近或远离槽体2的升降运动。
49.作为优选的实施例,第一驱动机构包括:设于隔板7远离槽体2的端面上的第一齿条9;设移载立柱32的第一驱动电机,该第一驱动电机的输出轴安装有第一驱动齿轮,第一驱动齿轮与第一齿条9构成第一齿轮齿条机构,用于驱动移载立柱32通过其设置的滑块沿第一导轨8水平运动。作为其它实施例(图中未示出),移载立柱32也可以通过气缸驱动机
构、电缸驱动机构、丝杠螺母机构、齿轮同步带机构等作为第一驱动机构以驱动其沿第一导轨8水平运动。作为一种实施方式,移载立柱32在其平行于第一方向a上的相对一端设有红外发射装置4,其另一端设有红外接收装置5;移载立柱32还可以在其平行于第一方向a上的相对一端设有限位感应片,其另一端设有限位感应器。
50.在本实施例中,第二驱动机构包括:设于移载立柱32的第二驱动电机(图中未示出),由该第二驱动电机驱动进行升降运动的丝杠螺母机构(图中未示出),丝杠螺母机构的运动件安装有机械横臂31。作为优选的实施方式(图中未示出),丝杠螺母机构设置于空心移载立柱32的内部容腔中,移载立柱32朝向槽体2的一端设有供机械横臂31伸出的让位槽。作为其它实施例(图中未示出),机械横臂31也可以通过气缸驱动机构、电缸驱动机构、丝杠螺母机构、齿轮同步带机构等作为第二驱动机构以驱动其进行升降运动。
51.作为一种优选的实施例(图中未示出),防撞保护结构还包括:沿垂直于第一方向a的第二方向b水平设置于运动件上的第二导轨;驱动装置还包括,第三驱动机构,用于驱动机械横臂31沿第二导轨做靠近或远离槽体2的水平运动。本实施例中,第三驱动机构:安装于运动件上的横板,设于横板上的第二导轨,该横板也可以用框架代替;安装于机械横臂31上的第二齿条;安装于横板上的第三驱动电机,该第三驱动电机的输出轴安装有第二驱动齿轮,第二驱动齿轮与第二齿条构成第二齿轮齿条机构,用于驱动机械横臂31沿第二导轨水平运动。作为其它实施例,机械横臂31也可以通过气缸驱动机构、电缸驱动机构、丝杠螺母机构、齿轮同步带机构等驱动机构驱动沿第二导轨水平运动。
52.作为一种优选的实施例,设备本体1沿第一方向a依次设置有两个以上槽体2,隔板7、第一导轨8和各搬移机构3及其驱动装置34设于所有槽体2的同一侧。通过两个以上的搬移机构3协同搬运作业,实现将待清洗物件沿第一方向a依次松开放入并抓取离开各个槽体2以完成多轮清洗作业。
53.作为另一种优选的实施例(图中未示出),设备本体1沿第一方向a并排设置有两个以上槽体2,位于外侧的一个槽体2远离相邻槽体2的一侧设有隔板7、第一导轨8和各搬移机构3及其驱动装置34;机械横臂31设有与每个槽体2一一对应的两个以上的夹持装置。作为优选的实施方式,本实施例中的机械横臂31通过上述实施例中的第三驱动机构驱动沿第二导轨水平运动,以在第二方向b上延伸机械横臂31适应并排设置的多个槽体2的横向长度。
54.作为一种优选的实施例,搬移机构3设有防止驱动装置(具体可以是针对第一驱动齿轮、第一驱动电机和丝杠螺母机构的下部等结构)被槽体2中的溶液6腐蚀或污染的防护罩33,防护罩33在其平行于第一方向a上的相对一端设有红外发射装置4,其另一端设有红外接收装置5。作为优选的实施方式,防护罩33还可以在其平行于第一方向a上的相对一端设有限位感应片,其另一端设有限位感应器。防护罩33可以制成方体结构,也可以依据驱动装置的形状和尺寸大小设置成长方体、正方体或者其它形状。
55.以上仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。