1.本实用新型涉及大气遥感探测技术领域,更具体地说,涉及一种大气遥感探测激光雷达的扫描装置。
背景技术:
2.大气遥感探测激光雷达,作为一种重要的大气环境监测仪表,利用激光的米散射、瑞利散射等光学原理,为大气污染溯源、治理等提供有价值的信息。
3.大气遥感探测激光雷达在扫描溯源应用中,需要扫描装置做立体旋转扫描。现有技术中,申请号为201520710458.6的专利公开了一种激光雷达三维扫描装置,激光雷达不转动,第一反射镜和第二反射镜旋转就可以让发射光和接收光轴发生偏转,这种结构适用于激光雷达结构庞大、重量大的情况,且由于激光雷达接收光截面比较大,反射镜也需要大尺寸,导致整体设备成本较高,使用中随着反射镜旋转线缆缠绕会加剧线缆磨损,甚至出现短路。申请号为201911315277.2的专利公开了一种三维扫描式激光雷达能见度仪,当其进行斜程扫描时,能见度传感器和摄像机重心偏离,此时需要电机输出较大的力矩,且重心偏离设备中心容易导致设备侧翻,造成损失。
4.因此,如何解决现有技术中扫描装置出现线缆缠绕磨损以及设备容易发生侧翻的问题,成为本领域技术人员所要解决的重要技术问题。
技术实现要素:
5.本实用新型的目的在于提供一种大气遥感探测激光雷达的扫描装置,解决现有技术中扫描装置出现线缆缠绕磨损以及设备容易发生侧翻的问题。本实用新型提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
6.为实现上述目的,本实用新型提供了以下技术方案:
7.本实用新型提供了一种大气遥感探测激光雷达的扫描装置,包括水平电机、垂直电机、支架以及设置在所述支架的正上方的激光雷达,所述水平电机带动所述支架在水平面内转动,所述激光雷达与所述支架的上端可转动地相连接、并在所述垂直电机的带动下在竖直面内以自身的中心轴为轴转动,所述支架的底部中心设有电子滑环,所述电子滑环的输入线缆与所述水平电机的线缆相连接,所述电子滑环的输出线缆与所述垂直电机的线缆以及所述激光雷达的线缆均连接。
8.优选地,所述水平电机为直驱电机,所述水平电机的中心设有通孔,所述电子滑环设置在所述通孔内,所述水平电机的定子与所述电子滑环的定子固定连接,所述水平电机的转子与所述电子滑环的转子相连接。
9.优选地,所述水平电机的输出端设有主动齿轮,所述支架的下端固定连接从动齿轮,所述主动齿轮与所述从动齿轮啮合连接,所述电子滑环设置在所述从动齿轮的中心孔内;
10.或,所述水平电机的输出端设有主动带轮,所述支架的下端固定连接从动带轮,所
述主动带轮和所述从动带轮之间覆有皮带,所述电子滑环设置在所述从动带轮的中心孔内。
11.优选地,所述垂直电机为直驱电机,所述垂直电机的输出端与所述激光雷达的一端固定连接;
12.或,所述垂直电机的输出端设有主动齿轮,所述激光雷达的一端固定连接从动齿轮,所述主动齿轮与所述从动齿轮啮合连接;
13.或,所述垂直电机的输出端设有主动带轮,所述激光雷达的一端固定连接从动带轮,所述主动带轮和所述从动带轮之间覆有皮带。
14.优选地,所述支架包括底盘和对称设置在所述底盘上的两个支撑臂,所述底盘的中心设有供所述电子滑环的上端露出的探孔,所述支撑臂的上端设有轴孔,所述激光雷达的两端均设有柱状凸起,所述柱状凸起伸入于所述轴孔内。
15.优选地,所述激光雷达内部位于其转动轴上设有供线缆穿入的线缆通道。
16.优选地,所述激光雷达为大气气溶胶激光雷达或大气臭氧激光雷达或云高仪或能见度仪或大气测风激光雷达或大气二氧化硫激光雷达或大气氮氧化物激光雷达。
17.优选地,所述主动齿轮和所述从动齿轮为直齿轮或伞齿轮。
18.优选地,所述水平电机的线缆和所述垂直电机的线缆均包括电源线和控制线缆。
19.本实用新型提供的技术方案中,大气遥感探测激光雷达的扫描装置包括水平电机、垂直电机、支架以及激光雷达,水平电机带动支架在水平面内转动,激光雷达与支架的上端可转动地相连接,垂直电机带动激光雷达在竖直面内以自身的中心轴为轴转动,激光雷达设置在支架的正上方,支架的底部中心设有电子滑环,电子滑环的输入线缆与水平电机的线缆相连接,电子滑环的输出线缆与垂直电机的线缆以及激光雷达的线缆均连接。如此设置,电子滑环位于水平电机的中心,支架在水平面内转动时,垂直电机的线缆以及激光雷达的线缆均不会再围绕支架缠绕,避免了线缆缠绕磨损的问题;而且,激光雷达处于支架的正上方并且转动时以自身的中心轴为轴转动,重心不会偏离支架的中轴线,不会发生扫描设备侧翻的情况。
附图说明
20.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
21.图1是本实用新型实施例中大气遥感探测激光雷达的扫描装置的俯视图;
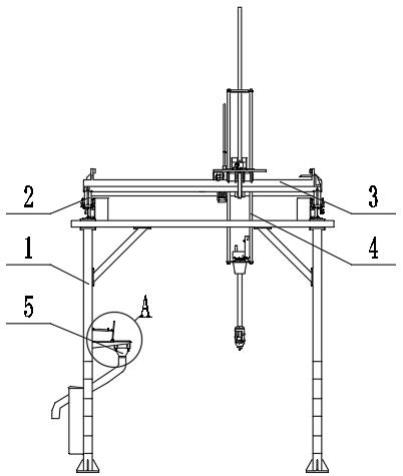
22.图2是图1的a-a剖视图;
23.图3是本实用新型实施例中电子滑环的俯视图;
24.图4是图3的b-b剖视图;
25.图5是本实用新型一实施例中水平电机为非直驱电机时的连接结构示意图;
26.图6是本实用新型又一实施例中水平电机为非直驱电机时的连接结构示意图;
27.图7是本实用新型一实施例中垂直电机为非直驱电机时的连接结构示意图;
28.图8是本实用新型又一实施例中垂直电机为非直驱电机时的连接结构示意图;
29.图9是本实用新型又一实施例中大气遥感探测激光雷达的扫描装置的剖视图。
30.图中:
31.1-水平电机,2-电子滑环,21-电子滑环的定子,22-电子滑环的转子,23-输入线缆,24-输出线缆,3-支架、31-底盘,32-支撑臂,4-垂直电机、5-激光雷达,51-线缆通道,6-主动齿轮,7-从动齿轮,8-主动带轮,9-从动带轮,10-皮带。
具体实施方式
32.为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
33.本具体实施方式的目的在于提供一种大气遥感探测激光雷达的扫描装置,解决现有技术中扫描装置出现线缆缠绕磨损以及设备容易发生侧翻的问题。
34.以下,参照附图对实施例进行说明。此外,下面所示的实施例不对权利要求所记载的实用新型内容起任何限定作用。另外,下面实施例所表示的构成的全部内容不限于作为权利要求所记载的实用新型的解决方案所必需的。
35.请参阅图1-图9,在本实施例中,大气遥感探测激光雷达的扫描装置包括水平电机1、垂直电机4、支架3以及激光雷达5,水平电机1带动支架3在水平面内转动、其转动轴处于竖直面内且为支架3的中心轴,激光雷达5与支架3的上端可转动地相连接,垂直电机4带动激光雷达5在竖直面内转动、其转动轴水平且为激光雷达5的中心轴,激光雷达5设置在支架3的正上方,支架3的底部中心设有电子滑环2,电子滑环2的输入线缆23与水平电机1的线缆相连接,电子滑环2的输出线缆24与垂直电机4的线缆以及激光雷达5的线缆均连接。
36.如此设置,电子滑环2位于水平电机1的中心,垂直电机4的线缆以及激光雷达5的线缆从水平电机1中心的电子滑环2连线,支架3在水平面内转动时,避免了垂直电机4以及激光雷达5的线缆在支架3周围缠绕;而且,激光雷达5处于支架3的正上方并且转动时以自身的中心轴为轴转动,重心不会偏离支架3的中轴线,不会发生扫描设备侧翻的情况。
37.在本实施例的优选方案中,水平电机1为直驱电机,直驱电机可以直接与负载相连,在水平电机1的中心设有通孔,电子滑环2设置在通孔内。水平电机1的定子与电子滑环的定子21固定连接,水平电机1的转子与电子滑环的转子22通过螺栓或连接片等结构实现固定连接、以使电子滑环的转子22随水平电机1的转子一起旋转,支架3的下端与水平电机1的转子相连接,支架3在水平面内的转动角度为0~360
°
。在具体的实施例中,电子滑环2的输入线缆23设置在其定子上,电子滑环2的输出线缆24设置在其转子上并随转子一起转动;电子滑环的定子21与水平电机1的固定基座连接、以实现与水平电机1的定子相对固定。
38.在本方案的具体实施例中,请参考图5,水平电机1为非直驱电机,需要通过传动件与负载相连,水平电机1可以为伺服电机或步进电机。在一些实施例中,采用齿轮传动的方式带动支架3旋转,在水平电机1的输出端设有主动齿轮6,支架3的下端固定连接从动齿轮7和转接座,主动齿轮6与从动齿轮7啮合连接,电子滑环2设置在从动齿轮7的中心孔内,电子滑环的定子21与扫描装置的支撑架体固定连接,电子滑环的转子22与从动齿轮7相连接、跟随从动齿轮7一起转动。
39.当然,请参考图6,水平电机1为非直驱电机时,还可以采用皮带10传动的方式,在水平电机1的输出端设置主动带轮8,支架3的下端固定连接从动带轮9和转接座,主动带轮8和从动带轮9之间覆有皮带10,电子滑环2设置在从动带轮9的中心孔内,电子滑环的定子21与扫描装置的支撑架体固定连接,电子滑环的转子22与从动带轮9相连接、跟随从动带轮9一起转动。电子滑环2的输出线缆24贯穿支架3与垂直电机4的线缆以及激光雷达5的线缆连接。
40.需要说明的是,主动齿轮6和从动齿轮7可以为直齿轮或伞齿轮。当然,还可以将主动齿轮6和从动齿轮7替换为蜗轮蜗杆,将蜗杆与水平电机1的输出端连接,蜗杆与涡轮啮合连接。
41.进一步地,垂直电机4也可以为直驱电机或非直驱电机。垂直电机4选择直驱电机时,其输出端直接与激光雷达5的一端固定连接,带动激光雷达5在支架3的上端转动。垂直电机4选择非直驱电机时,请参考图7和图8,可以采用伺服电机或步进电机,在垂直电机4的输出端设置主动齿轮6,激光雷达5的一端固定连接从动齿轮7和转接座,主动齿轮6与从动齿轮7啮合连接;当然,还可以在垂直电机4的输出端设置主动带轮8,激光雷达5的一端固定连接从动带轮9和转接座,主动带轮8和从动带轮9之间覆有皮带10,通过皮带10传动带动激光雷达5转动。
42.需要说明的是,主动齿轮6和从动齿轮7可以为直齿轮或伞齿轮。当然,还可以将主动齿轮6和从动齿轮7替换为蜗轮蜗杆,将蜗杆与垂直电机4的输出端连接,蜗杆与涡轮啮合连接。
43.在本实施例中,支架3包括底盘31和对称设置在底盘31上的两个支撑臂32,底盘31的中心设有供电子滑环2的上端露出的探孔,支撑臂32的上端设有轴孔,激光雷达5的两端均设有柱状凸起,柱状凸起伸入于轴孔内,使激光雷达5处在两个支撑臂32之间。底盘31可以但不限于为圆形。如此设置,使得激光雷达5能够相对于支架3转动,且处在支架3的中心的正上方,防止出现扫描装置侧翻的现象。
44.在本实施例的优选方案中,请参考图9,激光雷达5内部位于其转动轴上设有供线缆穿入的线缆通道51。激光雷达5的线缆经由线缆通道51内穿过,与电子滑环2的输出线缆24相连。如此设置,在激光雷达5以转动轴转动时,不会出现线缆在自身表面缠绕的问题。激光雷达5的转动角度为0~90
°
或者0~180
°
。当然,还可以在垂直电机4的内部也设置供线缆穿入的贯穿孔,更便于线缆布线设置。
45.需要说明的是,在本方案中,水平电机1的线缆、垂直电机4的线缆以及激光雷达5的线缆均包括电源线和控制线缆。通过电源线与电源连接、以提供电能,通过控制线缆与控制部件相连、以进行信号交互。水平电机1的线缆与外部的电源和控制部件的线缆合拢为一个整体,再与电子滑环2的输入线缆23相连接,电子滑环2的输出线缆24穿过支架3内部后与垂直电机4的线缆以及激光雷达5的线缆相连接。
46.在具体的实施例中,激光雷达5为大气气溶胶激光雷达5或大气臭氧激光雷达5或云高仪或能见度仪或大气测风激光雷达5或大气二氧化硫激光雷达5或大气氮氧化物激光雷达5,以实现对大气中不同污染物分布等信息的监测。
47.可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。本实用新型提供的多个方案
包含本身的基本方案,相互独立,并不互相制约,但是其也可以在不冲突的情况下相互结合,达到多个效果共同实现。
48.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。