1.本实用新型属于食品加工的输送线,尤其涉及对于动物胴体的输送,同时也进行信息的录入。
背景技术:
2.目前市场上,对于动物胴体的输送过程中,一般以人工操作为主,为了减少人员的操作次数,通常以一定量的胴体为一组进行输送,先将一定量的胴体进行称重,再将这一组做为一个整体进行信息录入,以至于使得后期在对胴体进行处理时,不能及时对单个胴体的信息进行分析和处理。
技术实现要素:
3.基于上述问题,本实用新型提供一种动态称重输送装置,动物胴体在输送过程中,能实现称重,同时实现各信息的录入;实现了静态称可以动态使用;静态称价格一般在1-2万,但动态称价格为10-15万,能明显节约成本。
4.本实用新型所采用的技术方案如下:
5.动态称重输送装置,包括喂入前装置、喂入装置和气动轨道线;其中,
6.喂入前装置,包括第一轨道、位移管和喂入前接近开关装置;第一轨道通过第一支架安装在气动轨道线上;
7.位移管位于第一轨道的一侧;
8.喂入前接近开关装置固定在气动轨道线的一侧,包括支板、旋转块、配重块和接近开关;支板的一侧安装有接近开关;支板的另一侧安装有活动轴;活动轴上安装有旋转块,旋转块能在活动轴上转动;旋转块的一侧平台上安装有固定片,固定片与位移管相固定;旋转块另一侧平台上安装有配重块;配重块与接近开关相平行;
9.喂入装置,包括第二轨道和第一气缸;第一气缸上安装有第二支架;第二轨道的一端与第一轨道的一端相连接,另一端安装在第二支架上;第一气缸的一侧安装有第一支撑块和第二支撑块;第一支撑块托住第二轨道;
10.第一轨道和第二轨道为一体;第一气缸的上下往复运动,通过第二支撑块实现第二轨道上升和下降,上升时最终与第三轨道呈同一水平;
11.气动轨道线,包括第三轨道、推轨、静态称和第二气缸;第三轨道固定在推轨的下方;第三轨道分成三段,分别为过渡段、称重段和输送段;第二支撑块托住第三轨道中的过渡段;称重段的一端与过渡段不接触,另一端与输送段不接触;
12.推轨上安装有静态称和第二气缸;静态称安装在称重段的上方;静态称上安装有两个第三支架,两个第三支架的一端分别托住称重段的两端;
13.推轨上安装有推杆,推杆沿推轨在水平方向上能做往复运动;推杆的下方安装有若干个推块;推块能在推杆上转动;推块的一端呈尖状;第二气缸上的活塞杆与推杆之间安装有三角块;活塞杆的往复运动,带动了推杆的往复运动。
14.进一步的,旋转块呈z字型。
15.进一步的,第三轨道上均匀的分布有凹坑。
16.进一步的,推轨的一侧安装有fid信息读取器;fid信息读取器位于过渡段的一侧。
17.进一步的,位移管呈c字型。
18.本实用新型的工作流程:挂有动物胴体的挂钩,依次挂在第一轨道上,在每个挂钩上都录入了本片动物胴体的初始信息;此时的第一轨道往下倾斜状,受重力作用,挂钩自动滑向喂入前装置,到达位移管时,由于挂钩有一定的厚度,同时受重力作用,挂钩推开位移管继续往前到达第二轨道;位移管的往外移动,推动了固定片往外移动,由于固定片安装在旋转块上,旋转块绕旋转轴转动,配重块发生了位移,支架上的接近开关将信号传给第一气缸,第一气缸的上下往复运动,向上运动时,通过第二支架,将第二轨道的一端抬起,与第三轨道平齐;第二气缸工作,活塞杆回收,推杆水平移动,带动推块往前,同时推着挂钩往前,挂有动物胴体的挂钩往前移动,挂钩被移到第三轨道过渡段的凹坑处,此时fid信息读取器工作,读取挂钩上的动物胴体信息;活塞杆回收,推杆再次水平移动,推块再次推动挂钩到称重段,通过动态称,对挂钩上的动物胴体进行称重,同时将重量信息写入fid中;将第二气缸的往复运动设置成15秒,保证了fid数据的读取,同时挂钩到达称重段时,能有个稳定的过程,再进行称重,能提高称重的精准度。
19.本实用新型通过静态称,实现了动态称重,并实现了称重的同时达到输送的目的,提高了生产线的自动化程度。
附图说明
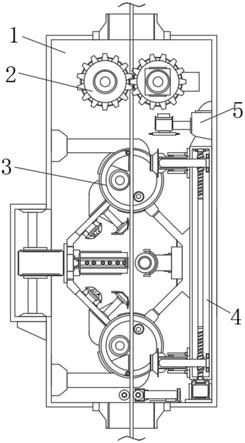
20.图1是本实用新型的结构示意图;
21.图2是本实用新型中喂入前装置的结构示意图;
22.图3是本实用新型中喂入装置的结构示意图;
23.图4是本实用新型中喂入装置的另一角度的结构示意图;
24.图5是本实用新型中第三轨道的结构示意图;
25.图6是本实用新型中推轨的结构示意图。
具体实施方式
26.以下详细描述本实用新型的技术方案。本实用新型实施例仅供说明具体结构,该结构的规模不受实施例的限制。
27.参见图1至图6所示,动态称重输送装置,包括喂入前装置1、喂入装置2和气动轨道线3;其中,
28.喂入前装置1包括第一轨道11、位移管12和喂入前接近开关装置13;位移管呈c字型。第一轨道11通过第一支架111安装在气动轨道线3上;位移管12位于第一轨道11的一侧。
29.喂入前接近开关装置13固定在气动轨道线3的一侧,包括支板131、旋转块132、配重块133和接近开关134;支板131的一侧安装有接近开关134;支板131的另一侧安装有活动轴135;活动轴135上安装有旋转块132,旋转块132呈z字型,能在活动轴135上转动;旋转块132的一侧平台上安装有固定片136,固定片136与位移管12相固定;旋转块132另一侧平台上安装有配重块133;配重块133与接近开关134相平行;当位移管12推动固定片136往外移,
旋转块132转动,使得配重块133逆时针转动,使得接近开关131工作。
30.喂入装置2包括第二轨道21和第一气缸22;第一气缸22的气杆221上安装有第二支架23;第二轨道21的一端与第一轨道11的一端相连接,另一端安装在第二支架23上;第一气缸22的一侧安装有第一支撑块24和第二支撑块25;第一支撑块24托住第二轨道21。
31.第一轨道11和第二轨道21为一体;第一气缸22工作,气杆221的上下往复运动,通过第二支架实现第二轨道21的上升和下降,第二轨道21上升时最终与第三轨道31呈同一水平。
32.气动轨道线3包括第三轨道31、推轨32、静态称33和第二气缸34;第三轨道31上均匀的分布有凹坑314。
33.第三轨道31固定在推轨32的下方;第三轨道31分成三段,分别为过渡段311、称重段312和输送段313;第二支撑块25托住第三轨道31中的过渡段311的一端;称重段312的一端与过渡段311不接触,另一端与输送段313不接触。
34.推轨32上安装有静态称33和第二气缸34;静态称33安装在称重段312的上方;静态称33上安装有两个第三支架35,两个第三支架35的一端分别托住称重段312的两端。
35.推轨32上安装有推杆321,推杆321能沿着推轨32在水平方向上做往复运动;推杆321的下方安装有若干个推块322;推块322能在推杆321上转动;推块322的一端呈尖状;第二气缸34上的活塞杆341与推杆321之间安装有三角块36;活塞杆的往复运动,带动了推杆321的往复运动。
36.推轨32的一侧安装有fid信息读取器37;fid信息读取器37位于过渡段311的一侧。每个挂钩38上都安装有芯片,记录着每片动物胴体的信息。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。