1.本实用新型涉及传感器的技术领域,特别涉及一种用于测量气动数据的风标式传感器。
背景技术:
2.模型飞行试验是通过飞行器模型在大气中飞行进行空气动力学问题研究的一种模拟飞行试验方法,是空气动力学的三大研究手段之一。通过开展模型大迎角飞行试验获取大迎角气动特性和操稳特性,可以有效验证危险边界飞行控制律,为研制具有过失速机动飞行能力的战斗机提供技术支撑。研制一种能够准确测量模型飞机大迎角飞行状态下气动数据的风标式传感器,是实施大迎角飞行试验的关键。需要测量的气动数据主要包括:空速、迎角、侧滑角。传统的风标式传感器测量范围小,无法满足大于30
°
的大迎角测量需求。
技术实现要素:
3.本实用新型意在提供一种用于测量气动数据的风标式传感器,解决了传统的风标式传感器测量范围小,无法满足大于30
°
的大迎角测量需求的问题。
4.为了达到上述目的,本实用新型的技术方案如下:一种用于测量气动数据的风标式传感器,包括空速管组件和两套风标组件;
5.所述空速管组件包括前管、后管、第一总压管管头、第二总压管管头、第三总压管管头、总压导管和静压导管,所述前管和后管固定连接,所述第一总压管管头与前管的轴线重合,所述第二总压管管头与第一总压管管头成40
°
夹角,所述第三总压管管头与第二总压管管头成40
°
夹角;所述第一总压管管头、第二总压管管头和第三总压管管头上均连接有总压导管,每根所述总压导管的另一端穿出后管;所述静压导管穿射在后管上;
6.每套所述风标组件均包括角度传感器、风标转轴、风标杆和风标叶片,任一所述角度传感器设置在前管的水平侧面,另一所述角度传感器设置在与前管轴线呈45
°
夹角的斜下方向上,所述角度传感器的导线穿过后管,所述角度传感器的另一端可拆卸连接在风标转轴一端,所述风标杆穿射在风标转轴另一端;所述风标叶片设置在风标杆的一端。
7.进一步的,所述角度传感器采用光电式绝对角编码器。
8.进一步的,所述后管的管壁上对称开有四个静压孔,位于上侧的两个所述静压孔的轴线之间夹角为38
°
,位于上侧的两个所述静压孔的轴线之间夹角为43
°
。
9.通过上述设置,采用上述的夹角可增加测量静压的准确性。
10.进一步的,所述风标杆采用不锈钢材料制成,所述风标叶片采用玻璃钢复合材料制成。
11.通过上述设置,采用不同密度风标叶片和风标杆可实现力矩平衡,相比全部采用同一种材料的风标叶片和风标杆体积要小。
12.进一步的,所述风标杆迎风端面采用半球形状。
13.进一步的,所述总压导管和静压导管均采用硅胶软管。
14.通过上述设置,采用硅胶软管能够任意弯曲,轻松避开管内障碍,布置方便。
15.与现有技术相比,本方案的有益效果:
16.本方案的测量范围达到100
°
,测量能力远超过传统的测量范围;通过采用光电式绝对角编码器作为角度传感器,克服了传统的霍尔角度传感器容易受磁场干扰的缺点,并提高了测量范围和测量精度;通过采用自平衡式风标,省去了配重,减小了机身气流的影响。
附图说明
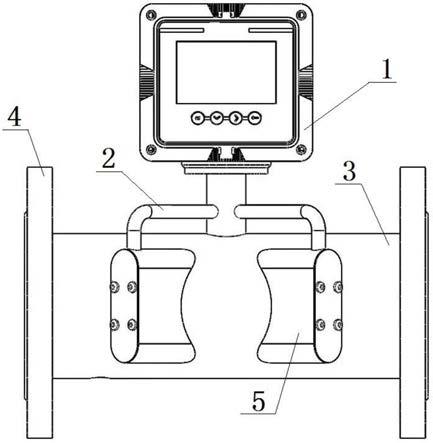
17.图1是本实用新型一种用于测量气动数据的风标式传感器的结构示意图;
18.图2是本实用新型中空速管件的剖视图;
19.图3是图2中a-a的剖视图;
20.图4是本实用新型中风标组件的结构示意图;
21.图5是本实用新型中总压管管头安装位置的结构示意图;
22.图6是本实用新型中风标组件安装位置的主视图;
23.图7是本实用新型中风标组件安装位置的左视图。
具体实施方式
24.下面通过具体实施方式对本实用新型作进一步详细的说明:
25.说明书附图中的附图标记包括:空速管组件10、风标组件20、前管11、后管12、第一总压管管头13、第二总压管管头14、第三总压管管头15、总压导管16、静压导管17、角度传感器21、风标转轴22、风标杆23、风标叶片24。
26.实施例
27.如附图1所示:一种用于测量气动数据的风标式传感器,包括空速管组件10和两套风标组件20;
28.如图2、图3和图5所示,空速管组件10包括前管11、后管12、第一总压管管头13、第二总压管管头14、第三总压管管头15、总压导管16和静压导管17,前管11和后管12 固定连接,后管12的管壁上上下对称开有四个静压孔,位于上侧的两个静压孔的孔轴线之间夹角为38
°
,位于上侧的两个静压孔的孔轴线之间夹角为43
°
,静压导管17的一端安装在静压孔上,静压导管17的另一端穿过在后管12的右端。第一总压管管头13、第二总压管管头14和第三总压管管头15均安装在前管11内,第一总压管管头13的安装位置与前管11 的轴线重合,第二总压管管头14的安装位置与第一总压管管头13的安装位置成40
°
夹角,第三总压管管头15的安装位置与第二总压管管头14的安装位置成40
°
夹角;第一总压管管头13、第二总压管管头14和第三总压管管头15的末端均连接有总压导管16,每根总压导管16的右端穿出后管12的右端。每根总压导管16和静压导管17均采用硅胶软管。
29.如图4、图6和图7所示,每套风标组件20均包括角度传感器21、风标转轴22、风标杆23和风标叶片24,每个角度传感器21均采用光电式绝对角编码器,光电式绝对角编码器通过转动过程中测量光电编码盘各道刻线,以获取唯一的编码,进而解算出转动角度,从而克服了传统的霍尔角度传感器容易受磁场干扰的缺点,有利于提高测量范围和测量精度。任一角度传感器21安装在前管11的水平侧面上,另一角度传感器21安装在前管11的斜下方向
上且与前管11的轴线呈45
°
夹角,角度传感器21的导线穿过后管12,风标转轴22的顶部开有横孔、底部开有竖孔,角度传感器21的转轴穿入风标转轴22的竖孔,且角度传感器 21的转轴与风标转轴22上共同穿设有螺钉,风标杆23穿射在风标转轴22的横孔内且与风标杆23胶接固定,风标杆23迎风端面采用半球形状,减小空气阻力干扰。风标叶片24设置在风标杆23的一端。风标组件20工作时,风标叶片24、风标杆23、风标转轴22和角度传感器21的转轴固联为一体。风标叶片24采用密度小的玻璃钢复合材料制成,风标杆23 采用密度大的不锈钢材料制成,通过采用不同密度的风标叶片24和风标杆23来达到自平衡效果,并且将风标的气动中心调整至横孔处,因此风标受到的径向力矩很小,适于低速状态下的迎角和侧滑角测量。
30.本方案的工作过程,本风标传感器安装在飞机的正前方,空速管组件10与飞机机身轴线方向平行并指向前;位置靠前的朝向侧面的风标组件20测量迎角数据,位置靠后的朝向斜下方的风标组件20测量侧滑角数据;风标传感器远离机身表面,受到飞机表面气流的影响小,可以准确输出迎角和侧滑角的测量数据。
31.当风标叶片24的中心线与气流方向平行时,即无迎角或侧滑角产生,气动力不产生力矩,风标叶片24不转动。当模型飞机以某一迎角或侧滑角飞行时,由于风标叶片24所受气动力产生力矩,使风标叶片24转动消除风标自身的迎角,直到风标叶片24中心线与气流方向一致为止,此时风标叶片24与机体轴线之间的夹角同模型飞机的迎角或侧滑角相等。风标叶片24偏转带动风标转轴22转动,风标转轴22转动的角度由角度传感器21直接读取,再通过系统解算,对外输出迎角或侧滑角数据。
32.通过将空速管组件10中引出的总压导管16和静压导管17分别与气压传感器相连,读取流场的总压和静压大小,再利用伯努利方程即可求出飞行速度;迎角在
±
20
°
范围内,读取第一总压管管头13所连接的气压传感器数据;迎角在20
°
~60
°
范围内,读取第二总压管管头14所连接的气压传感器数据;迎角在60
°
~100
°
范围内,读取第三总压管管头15所连接的气压传感器数据。
33.以上的仅是本实用新型的实施例,方案中公知的具体结构和/或特性等常识在此未作过多描述。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。