技术特征:
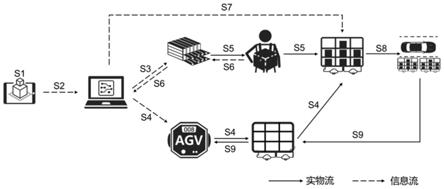
1.一种自动化立体货柜与agv混合调度方法,其特征在于,具体包括如下步骤:步骤s1:立体货柜存储端参数设定;步骤s2:使用立体货柜端pda扫描备货单,将备货信息传输至上位调度系统;步骤s3:上位调度系统将备货指令传递给立体货柜,立体货柜根据备货单信息,选择匹配的托盘,输出至备货口;步骤s4:上位调度系统根据备货单的作业量,调度agv牵引指定的上线器具,行驶至接驳区;步骤s5:备货员根据立体货柜指示屏的系统提示,拿取指定的零件,并将零件放置在agv牵引的上线器具上;步骤s6:备货员完成该单备货任务后,触发“备货完成”指令给调度系统,告知立体货柜该单任务已完成,可进行下一单任务,即步骤s2至步骤s5的循环作业;步骤s7:中控系统同时将该单任务信息与系统中既定的上线点、上线路线进行匹配,发送给智能agv;步骤s8:agv接到指令后,按指令信息将零件牵引上线点;步骤s9:agv在完成上线任务后,将空器具送至空器具缓存区,再返回agv等待区,进行步骤s4至步骤s8的循环作业。2.如权利要求1所述的一种自动化立体货柜与agv混合调度方法,其特征在于,所述步骤s1具体内容包括:步骤s11:识别物流模式;步骤s12:设定存储周期原则与要货原则;步骤s13:合理规划每个托盘所存储的零件,并与立体货柜的wms系统进行数据绑定;步骤s14:立体货柜出货口设计备货拣选指示功能。3.如权利要求2所述的一种自动化立体货柜与agv混合调度方法,其特征在于,步骤s11所述物流模式包括批量或者sps单辆份拣选;步骤s14备货拣选指示功能包括坐标指示、图例指示或投影指示。4.如权利要求1所述的一种自动化立体货柜与agv混合调度方法,其特征在于,所述步骤s3具体内容包括:步骤s31:中控系统读取备货单信息,与系统中设定好的订单信息进行匹配;步骤s32:中控系统将订单信息传递给自动立体货柜;步骤s33:立体货柜将订单信息转化为与订单匹配的托盘信息;步骤s34:立体货柜按照既定的顺序,依次调度托盘,将托盘与零件输出至备货口。5.如权利要求1所述的一种自动化立体货柜与agv混合调度方法,其特征在于,所述步骤s4具体内容包括:步骤s41:中控调度系统根据订单信息计算备货需要的时间与agv调度接驳的时间;步骤s42:中控调度系统依据所计算出的agv接驳所需时间,适时向agv发出调度信息;步骤s43:agv接到调度指令后,前往指令要求的空器具存储位置,与空器具完成挂接;步骤s44:agv与空器具挂接后,按照调度指令要求,将空器具牵引至备货区,供备货员备货使用。6.如权利要求1所述的一种自动化立体货柜与agv混合调度方法,其特征在于,所述步
骤s9具体内容包括:步骤s91:agv将备好的满器具配送至系统要求的制定地点,与满器具完成脱钩;步骤s92:脱钩后满器具停留在上线点,供生产线生产使用;步骤s93:脱钩后agv行驶至待返空器具暂存位,与需返空器具完成挂接;步骤s94:agv牵引返空器具行驶至空器具缓存区,按照系统指令将空器具牵引至制定缓存位;步骤s95:agv与空器具自动脱钩,将空器具留在空器具缓存位;步骤s96:agv驶离空器具缓存区,行驶至agv等待区,充电待机,等待下一个订单任务。7.一种自动化立体货柜与agv混合调度系统,用于实现权利要求1-6任意一项所述的调度方法,其特征在于,包括上位调度系统、自动立体货柜、拣选指示系统、agv及上线器具;自动立体货柜包括仓储管理系统与设备控制系统;所述上位调度系统,用于将备货单信息转化为订单信息,再分别发送调度指令给自动立体货柜与agv;所述拣选指示系统,用于按订单指示挑选作业;所述上线器具,用于放置生产线生产装配所需的零部件,便于生产线所需的零部件集中存放,保证零部件在抵达生产线使用前的质量状态,为零部件送至生产线提供一个安全、便捷的放置环境;所述仓储管理系统,用于计算库存,通过期初的设定值、出入库数量进行库存数量的调整,通过设定阈值,当库存数量达到阈值时进行要货指令发出相关信息传递;所述设备控制系统,用于下达设备运作指令,控制设备自身工作的系统,如控制设备输出托盘,控制设备按输入信息进行信息显示,控制设备行驶、转弯或举升。8.一种计算机设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1-6中任一所述的一种自动化立体货柜与agv混合调度方法。9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-6中任一所述的一种自动化立体货柜与agv混合调度方法。
技术总结
本发明公开了一种自动化立体货柜与AGV混合调度方法、系统、设备及存储介质,属于物流技术领域,本发明采用自动化立体货柜与AGV的联动实现混合调度,其中,自动化立体货柜规格视其存储料箱规格与使用环境而定,平均每托盘周转周期20-40s;智能AGV为潜伏顶升式或潜伏牵引形式,导航方式为磁条或二维码导航,其牵引与导航形式可视使用环境与搭载器具设计情况进行选择,负载重量1000KG,具有前后防撞条检测及激光避障功能。本发明采用自动化立体货柜与AGV的联动混合调度,需根据立体货柜拣选备货环节所需要的工作时间,来确定AGV的调度任务。本发明采用自动立体货柜与AGV衔接,提高存储、分拣、配送衔接效率,形成一体化流程。形成一体化流程。形成一体化流程。
技术研发人员:高金宝 高跃峰 王丽娜 李智昊 祁英 王婉聪 马茵 杨盛华 徐昊 陆超 张金鑫
受保护的技术使用者:一汽物流有限公司
技术研发日:2021.11.26
技术公布日:2022/4/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。