1.本发明涉及建筑技术,特别是一种混凝土浇筑的自动装配模板。
背景技术:
2.目前,在建筑技术领域,大量使用着各种槽、管、箱类的构件,用这些构件来构筑输送水、污水或其他各种液体的管路。制备大型槽管类构件一般在施工现场浇筑,用于浇筑成型的模板由外模板和内模板构成,在内外模板之间预先配置好预应力加强筋,加强筋绑扎结实后在内外模板的间隙中浇筑搅拌好的混凝土,待混凝土凝固后将模板拆掉,这类构件即制备完成。由于浇筑混凝土的工艺比较简单,利用混凝土搅拌运输车边运输边搅拌,浇筑一旦开始将在很短时间内完成,因此决定这类构件制备周期的长短主要取决于模板的装配时间,然而,由于大型内模的支撑结构较为复杂,其装配、拆卸繁琐,需要完全依靠人工将多种板材、角铁、管材、异型构件等通过不同的连接件组装在一起,费时费力,远不能满足争时间抢进度的施工要求。而且,由于装配空间狭小,人在其中操作,极易碰伤,存有安全隐患。因此,研究内模的快速装配,即成为制约这类建筑构件制作速度的关键步骤。
3.发明人以分类号e04g、模板、槽(管、箱)为关键词在中国专利数据库中搜索,查到相关实用新型专利13925篇、授权发明1573篇,但没有发现与本发明技术方案类似的模板结构。比如中国专利cn2020107108313号、名称为“一种模板化自适应门窗洞口可调模板系统及其施工方法”,它公开了一种封闭框型建筑构件的混凝土浇筑模板,但其模板支撑系统仍需人工搭建,且这种模板结构难以支持大型厚重的混凝土浇筑。又如中国专利cn202022960366.7、名称为“一种用于雨污水检查井流槽施工的定制模板”,它给出的技术方案为“所述矩形定型模板包括方形内支撑,所述方形内支撑相对两侧固定安装有方形模板,所述弧形定型模板包括弧形内支撑,所述弧形内支撑外侧固定安装有弧形模板;所述矩形定型模板与弧形定型模板之间为拆卸连接”。但其模板分为矩形定型模板和弧形定型模板两部分,其截面形状为开口式结构,并不适用于封闭的槽、管、箱类的构件,且在装配时仍需人工操作,不能解决模板装配自动化的问题。
4.另外,在建筑物的突发事故中,需要快速完成损毁建筑物或城市给排水系统的搭建,重建时间紧、任务重,现场快速浇筑槽、管、箱类构件成为第一关键要素,而模板装配又成为耗时最多的工序。有鉴于此,业内普遍要求开发一种可快速自动化装配的模板结构来代替人工装配,以高效完成浇筑模板的组装和拆卸。
技术实现要素:
5.本发明的目的在于克服上述已有技术之缺陷、提供一种用于浇筑混凝土构件的自动装配模板,它以电机为驱动力,在单片机的控制下,自动控制浇筑模板各部件的收放,完成混凝土浇筑模板的组装;同时,在混凝土浇筑完毕后,又能自动收缩,减少粘结阻力,迅速使模板与混凝土层脱离,为内模拖移减少阻力。本发明的浇筑模板可反复拆装,具有结构简单、装配效率高、避免材料浪费的优点。
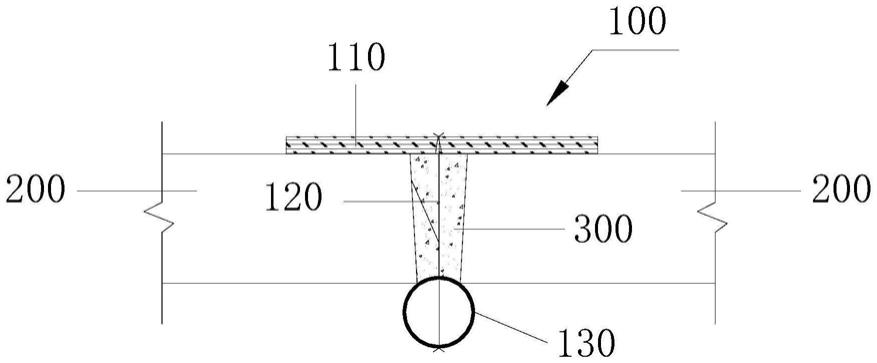
6.本发明的目的是以下述技术方案实现的:一种用于浇筑混凝土构件的自动装配模板,包括外模和内模;所述外模由左外模板和右外模板构成;所述内模设有四块模板,分为左上模板、左下模板、右上模板和右下模板,其中,所述左上模板的形状为角形,构成角形的两条边为竖直梁和水平梁,所述左下模板、右上模板和右下模板的形状、结构与左上模板相同;左上模板的竖直梁和左下模板的竖直梁在左铰接轴处铰接,两者构成内模的左半部分,内模的右半部分与左半部分对称,且结构相同;四块模板中角形的水平梁搭接;内模的右半部分与左半部分装配成为一个整体,与对应的左外模板和右外模板间隔配置;两者间的腔隙浇筑混凝土;内模板的水平梁与相应的驱动部分连接,驱动部分提供模板装配与拆卸的动力。
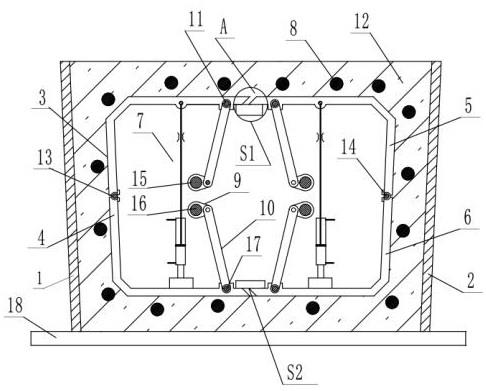
7.上述用于浇筑混凝土构件的自动装配模板,所述内模还设有四个驱动部分,分别是左上驱动部分、左下驱动部分、右上驱动部分和右下驱动部分,其中,左下驱动部分包括左下连杆、左下曲柄和左下驱动轴,左下曲柄固定在左下驱动轴上,左下曲柄和左下连杆传动连接,左下连杆和左下模板的水平梁铰接在铰接点;其余三个驱动部分的结构与左下驱动部分的结构相同;四个驱动部分的动力由电机通过传动部分提供;所述传动部分分为左半传动系和右半传动系,所述左半传动系包括左上驱动轴、左下驱动轴、主动齿轮和从动齿轮,所述主动齿轮固定在左下驱动轴上,左下驱动轴由第一电机经减速机减速后带动其旋转;所述从动齿轮固定在左上驱动轴上,主动齿轮和从动齿轮啮合,两者齿数和模数相同;所述右半传动系和左半传动系的结构相同、传动链相同。
8.上述用于浇筑混凝土构件的自动装配模板,增设模板的竖直梁之间的水平间距调节机构,所述水平间距调节机构包括左支撑座、右支撑座、调节螺套、左旋螺杆、右旋螺杆和托架;所述托架固定在左下模板上,调节螺套的两端分别与左旋螺杆和右旋螺杆构成旋向相反的螺纹副;所述左支撑座的两端分别骑跨在铰接的模板上;左支撑座的右端面设有盲孔,盲孔中设有第一压力传感器p1,左旋螺杆左端触压在第一压力传感器p1上,第一压力传感器p1用于检测左铰接轴处模板的压力数值,第一压力传感器p1的输出连接至控制部分。
9.上述用于浇筑混凝土构件的自动装配模板,增设间隔配置的左限位导向块、右限位导向块,托架的数量为两个,分别固定在左下模板和右下模板上,左限位导向块和右限位导向块则分别固定在左上模板和右上模板上;所述左限位导向块和右限位导向块的横截面均为“l”状,托架设有上部开口的槽状,与左旋螺杆配合的部位设计成弧型的开口,左支撑座穿过左限位导向块插入托架的槽状腔体内,右支撑座的插入方式与此相同;当水平间距调节机构减少水平尺寸时,左旋螺杆的牵引力作用在封盖上,封盖再通过托架作用在模板上,完成左右模板间距的调节。
10.上述用于浇筑混凝土构件的自动装配模板,增设模板的水平梁之间的竖直间距调节机构,所述竖直间距调节机构的数量为2-8个,分别对称设置在左上模板和左下模板的水平梁之间或右上模板和右下模板的水平梁之间;所述竖直间距调节机构由液压连杆、液压缸和压力传感器支座组成,其中,液压连杆连接液压缸的活塞杆,其另一端与右上模板铰接,液压缸支撑在压力传感器支座上,压力传感器支座安装在右下模板的水平梁上,压力传感器支座的底部装有第二压力传感器p2,第二压力传感器p2的输出连接至控制部分。
11.上述用于浇筑混凝土构件的自动装配模板,所述左上模板的水平梁的端部和右上模板的水平梁的端部搭接,搭接部分为平行的斜面,斜面与水平线的夹角α为30
°‑
45
°
。
12.上述用于浇筑混凝土构件的自动装配模板,增设水平位置检测传感器,所述水平位置检测传感器为两个,其中,所述第一水平位置检测传感器s1由左固定座、右固定座、磁钢和霍尔传感器组成,左固定座和右固定座分别固定在左上模板的水平梁的端部和右上模板的水平梁的端部,磁钢和霍尔传感器则分别固定在左固定座和右固定座最接近的相对的侧面;第二水平位置检测传感器s2固定在左下模板的水平梁的端部和右下模板的水平梁的端部,其结构、固定方式与第一水平位置检测传感器s1相同。
13.上述用于浇筑混凝土构件的自动装配模板,增设锁栓机构,所述锁栓机构包括锁栓和锁销,所述锁栓机构设置在水平位置检测传感器中,锁栓的一端铰接在左固定座上,另一端插入右固定座的开口槽内,并用锁销固定。
14.有益效果本发明将槽、管、箱状的建筑预制构件的内模设计成四块模板,四块模板之间相互铰接或搭接,构成构件截面所需的形状,通过四个驱动部分和传动链,分别将两个电机的动力传递至四块模板,完成整个预制构件内模的收紧或打开。这种结构具有操作简单、易于自动化,模板装配效率高的特点,预制构件生产周期短,节约能耗。本发明提出的模板结构可作为较长构件模板的装配单元,可根据构件长度的需要将多个单元模块利用法兰盘连接在一起,一次可浇筑较长槽箱,大大提高了生产效率。另外,本发明还克服了现有人工装配模板费事费力的缺点,具有装配拆卸速度快、结构整体性能好、安全系数高、减轻劳动强度的优点。除此之外,人工装配模板使用的材料不统一,随意性大,模板拆卸后无利用价值,只能当做废物,既浪费能源,又污染环境,而本发明的内模构件,可重复使用,大大节约了预制构件的材料成本。
附图说明
15.下面结合附图对本发明作进一步详述。
16.图1是本发明的模板结构示意图;图2是动力驱动及传动系统示意图;图3是竖直间距调节机构和水平间距调节机构的安装位置示意图;图4是竖直间距调节机构的结构示意图;图5是水平间距调节机构的结构示意图;图6是水平位置检测传感器和锁栓的结构示意图;图7是控制部分的电原理图。
17.图中各标号分别表示为: 1、左外模板,2、右外模板,3、左上模板,4、左下模板,5、右上模板,6、右下模板,7、竖直间距调节机构,7-1液压连杆,7-2、液压缸,7-3、压力传感器支座,8、加强筋,9、左下曲柄,10、左下连杆,11、左上铰接轴,12、混凝土构件,13、左铰接轴,14、右铰接轴,15、左上驱动轴,16、左下驱动轴,17、左下铰接轴,18、浇筑平台,19、左旋螺杆,20、右旋螺杆,21、微调螺套,22、左支撑座,24、导向滑套,25、第一电机,26,左轴座,27、右轴座,28、主动齿轮,29、从动齿轮,30、减速机,31、右支撑座,33、托架,34、封盖,35、左固定座,36、右固定座,37、锁栓,38、锁销,39、磁钢,40、霍尔传感器,41、左限位导向块,s1、第一水平位置检测传感器,s2、第二水平位置检测传感器,p1、第一压力传感器,p2、第二压力传感器,fm、电磁阀。
具体实施方式
18.本发明提供了一种用于浇筑混凝土构件的自动装配模板,用于解决混凝土构件生产过程中因内模结构复杂、拆装费时费力及材料浪费的问题。它主要由外模板、内模板、以及内模板的支撑体系构成。
19.自动装配模板包括外模和内模,所述外模由左外模板1和右外模板2构成;所述内模设有四块模板,分为左上模板3、左下模板4、右上模板5和右下模板6,四个模板的结构相同,以左上模板为例,所述左上模板3的形状为角形,构成角形的两条边为竖直梁和水平梁,所述左下模板4、右上模板5和右下模板6的形状与结构与左上模板3相同;左上模板3的竖直梁和左下模板4在左铰接轴13处铰接,两者构成内模的左半部分,内模的右半部分与左半部分对称,且结构相同;四块模板中角形的水平梁搭接;内模的右半部分与左半部分装配成为一个整体,与对应的左外模板1和右外模板2间隔配置;两者间的腔隙浇筑混凝土;内模板的水平梁与相应的驱动部分连接,完成模板的装配与拆卸。内模的截面形状为方形、圆形、梯形或其他多边形。
20.在构成模板顶角的竖直梁和水平梁之间,为了减少应力集中引起的损毁,可将顶角设计成平顶,相应地,竖直梁和水平梁之间的顶角也制成平顶。
21.构成本发明模板的材料可使用角钢、方钢、槽钢或其他异型钢材,在模板表面铺覆的钢板壁厚可在2-5毫米间选择。
22.本发明的内模还设有四个驱动部分,四个驱动部分结构相同,现以左下驱动部分为例进行说明。左下驱动部分包括左下连杆10、左下曲柄9和左下驱动轴16,左下曲柄9固定在左下驱动轴16上,左下曲柄9使旋转转变成左下连杆的移动,左下连杆10和左下模板4的水平梁铰接在左下铰接轴17处,在此处发力,将模板水平梁顶起,顶起的动力由第一电机25提供。左下连杆和水平梁铰接在左下铰接轴17处,这个铰接位置应尽可能靠近水平梁的端部,以降低顶起所需的力。为避免卡顿,各铰接轴处的铰接孔可设计成长圆孔或者较大的孔径。
23.本发明的传动部分分为左半传动系和右半传动系,两个传动系的结构相同、传动链相同。所述左半传动系包括左上驱动轴15、左下驱动轴16、主动齿轮28和从动齿轮29,左下驱动轴16为主动轴,它传动连接减速机30和第一电机25,第一电机25经减速机30减速后带动左下驱动轴16旋转;左下驱动轴16带动左下曲柄9和主动齿轮28旋转,左下连杆10移动,将左下水平梁顶起;主动齿轮28带动从动齿轮29旋转,从动齿轮29带动左上曲柄旋转,继而将左上水平梁顶起。因为两者齿数和模数相同,所以左上水平梁和左下水平梁的顶起时间稍有不同。由于受铰接处两竖直梁平直端面的限制,当水平梁顶起至水平时,即到达极限位置,不能无限增大。
24.模板的装配驱动需要较高力矩,因此,驱动轴选择的转速较低。本发明的第一电机25可以选择异步电机,经减速机降速,选择尽可能大的减速比,以进一步提高旋转力矩并能够自锁。
25.本发明的第一电机25、减速机30、左上驱动轴15、左下驱动轴16,等等,它们都通过各自的轴座等部件支撑在浇筑平台上,但为了照顾混凝土构件12的完整性,未在图纸中画出。
26.本发明还增设了上、下模板的水平梁的竖直间距调节机构7,它设置在上下水平梁
之间,通过液压缸和压力传感器的控制,使上下水平梁的受力均衡,合理分配在一个合适的数值上。由于左上模板3和左下模板4、右上模板5和右下模板6分别构成内模的左半部分与右半部分,尽管这四个模板设计结构、尺寸相同,但它们装配成为一个整体后,由于部件加工误差和装配误差的存在,并不一定构成设计的模板形状,需要在自动装配后,进行尺寸调整,这样在调整时,上下水平梁的竖直间距调节机构7即派上了用途。本发明利用压力传感器的输出来调整液压缸的驱动距离,进而调节模板结构的上下尺寸。导向滑套24将液压连杆7-1固定在机架上,用于限定液压连杆7-1的左右偏移。
27.本发明的竖直间距调节机构7的数量为2-8个,分别对称设置在左上模板3和左下模板4之间或右上模板5和右下模板6之间,用以确保整体结构尺寸的一致性。本发明中的竖直间距调节机构7还肩负着检测上下水平梁的各点受力是否均衡的目的,设在压力传感器支座7-3中的第二压力传感器p2将这个压力数值发送给cpu,由cpu 确定沿水平梁方向的各检测点的受力是否均匀,如若不同,cpu会令各个上下水平梁的竖直间距调节机构7中的液压缸7-2作压力调整,借以使水平梁各点负担的承重载荷在一个合理的范围内。
28.模板自动装配好后,在水平方向也会不可避免地出现装配误差,为此,增设左、右模板间的水平间距调节机构, 所述水平间距调节机构设置在左右模板的竖直梁之间;它包括左支撑座22、左旋螺杆19、调节螺套21、右旋螺杆20和右支撑座31;调节螺套21的套内两端分别设有内螺纹,分别与左旋螺杆19和右旋螺杆20构成旋向相反的螺纹副。调节螺套21的外形截面设计成多边形,当用扳手旋转调节螺套时,即可调整水平方向的尺寸。所述左支撑座22的底部为中空状,底脚突出且间隔设置,中间悬空,目的是使支撑座的两端分别骑跨在铰接的上下模板上,这样,当水平间距调节机构向外扩张时,可推动上下两个模板同时向外移动,施加的压力分配更为合理,使装配后的浇筑空间截面尺寸更为精准。
29.本发明的左支撑座22和右支撑座31浮压在模板上,本发明设置了托架33以及间隔配置的左限位导向块41、右限位导向块(未画出,下同),托架33固定在左下模板上,左限位导向块41和右限位导向块则固定在左上模板上。所述左限位导向块41和右限位导向块的横截面均为“l”状,托架33则设计成上部开口的槽状,与左旋螺杆19配合的部位设计成弧型的开口,这样可以将左支撑座22顺利穿过左限位导向块41和右限位导向块插入托架33的槽状腔体内。左旋螺杆19的左端为较大直径的端部,并被托架33弧型的开口所阻挡;当水平间距调节机构减少水平尺寸时,左旋螺杆19的牵引力作用在封盖34上,封盖再通过托架作用在模板上,从而完成左右模板间距的调节。
30.支撑座的右端面设有盲孔,盲孔中设置第一压力传感器p1,第一压力传感器p1用于检测左铰接轴13、右铰接轴14之间的尺寸是否符合要求。左铰接轴13和右铰接轴14的结构保证铰接的上、下模板的竖直梁处于同一竖直面时,铰接的两个竖直梁即无法继续向外偏转。为了使上、下竖直梁处于同一竖直平面内,本发明设置的水平间距调节机构除可以检测水平间距是否达到设计要求外,还可以通过第一压力传感器p1检测到的压力数值进行核查,只有间距尺寸达标,压力数值达标,才可能保证左铰接轴13、右铰接轴14之间的尺寸处于合理范围内。
31.本发明的右支撑座31和左支撑座22部分的结构相同、且左右对称,因此,未画出右支撑座31、右限位导向块以及托架的结构。
32.本发明还增设了水平位置检测传感器,所述水平位置检测传感器为两个,分别用
于检测位于上方的两个水平梁和位于下方的两个水平梁是否处于各自的水平线上。所述第一水平位置检测传感器s1由左固定座35、右固定座36、磁钢39和霍尔传感器40组成,左固定座35和右固定座36分别固定在左上模板3的水平梁的端部和右上模板5的水平梁的端部,磁钢39和霍尔传感器40则分别固定在左固定座35和右固定座36最接近的相对的侧面;当两个水平梁处于同一水平线上时,霍尔传感器接受到磁钢的信号,并向cpu发出信号,由cpu判断是否达到预存的阈值,以决定是否发出水平梁装配到位的信号,令第一电机25停转。第二水平位置检测传感器s2的结构、固定方式与第一水平位置检测传感器s1相同,此处不再赘述。
33.本发明将左上模板3的水平梁的端部和右上模板5的水平梁的端部搭接处,设计成平行的斜面,目的是解决混凝土浇筑时的漏浆问题,将斜面与水平线的夹角α设计为30
°‑
45
°
,可以最大限度地降低混凝土浆的泄漏,同时,又不会在装拆模板时,两个水平梁发生干涉,依据图3和图6给出的搭接斜面的倾斜方向,在装配时,应先驱动内模的左半部分;而在拆卸时,首先驱动右半部分。
34.模板装配到位后,为防止在混凝土浇筑中发生模板脱开的意外,本发明增设了锁栓机构,所述锁栓机构包括锁栓37和锁销38,当模板装配到位后,将锁栓37的另一端插入右固定座36的开口槽内,用锁销38固定后,即可牢牢予以固定。
35.本发明提出的模板结构长度较短,可作为较长建筑构件的模板的一个装配单元,如果建筑构件长度较长,可将多个单元模块利用法兰连接在一起,装配成较长的浇筑模板,一次可浇筑出较长的槽箱,大大提高了生产效率。
36.本发明的控制部分包括cpu、启动按钮qa、第一水平位置检测传感器s1、第二水平位置检测传感器s2、第一压力传感器p1、第二压力传感器p2、第一电磁阀fm1、第二电磁阀fm2、第一电机25的控制芯片ic1和第二电机(第二电机用于右半传动系的驱动,因与左半传动系的结构、作用相同,故未在图中画出,仅在控制部分说明了它的控制芯片ic2)。所述启动按钮qa连接在cpu的p0.0端口,所述第一水平位置检测传感器s1和第二水平位置检测传感器s2分别用于监测上下模板中的两个水平梁是否装配在一个水平线上,它们的信号输出连接在cpu的p1.0端口、p1.1端口上;第一压力传感器p1用于监测水平间距调节机构中的压力数值是否符合要求;第二压力传感器p2用于监测竖直间距调节机构中的压力数值是否符合要求;它们的信号输出分别连接在cpu的p1.2端口和p1.3端口。所述第一电机25的控制芯片ic1的两个信号输入端分别连接在cpu的p2.3端口—p2.4端口,用于接受第一电机25转向和启停信号;所述第二电机控制芯片ic2的两个信号输入端分别连接在cpu的p2.5端口—p2.6端口,用于接受第二电机转向和启停信号。所述第一电磁阀fm1、第二电磁阀fm2的两个线圈控制端分别连接在cpu的p2.1端口—p2.2端口,用于接受cpu输出的信号以控制哪个竖直间距调节机构中的电磁阀工作。
37.在本发明的电原理图中,cpu的输出直接连接被控元器件,但若需要较大的驱动信号,可以在两者之间加入中继,比如三极管放大电路、中间继电器、转换电路,等等。
38.本发明的cpu可采用stc89c52,电机控制模块ic1采用mc33886,电磁阀可选择k35hd2-6。
39.霍尔传感器输出的位置信号给cpu发出了可以给液压支撑杆7的液压缸9供油,驱动液压支撑杆7移动到位,顶紧左上模板3和左下模板4、以及右上模板5和右下模板6。顶紧力可以从压力传感器11的输出的油压数值中获得,由cpu与预存的压力阈值比较后,判断是
否达标。控制液压缸进出油是由电磁阀dcf完成的,电磁阀可采用普通的三位五通阀来控制支撑杆的动作方向。
40.本发明内模的装配与拆卸自动化是在控制电路控制下完成的,装配操作按如下程序进行:1、将内模构件移动至构件制作平台18上,就绪后,启动第一电机25,第一电机25旋转带动减速机30转动,左下驱动轴16转动,主动齿轮28带动从动齿轮29旋转,同时,左下曲柄9旋转,左下连杆10随之向下运动,左下模板4被顶开,与此同时,其他三块模板也被顶开;2、在内模装配时,四块模板被支起后是否到位,是由两个水平位置检测传感器完成的,第一水平位置检测传感器s1或第二水平位置检测传感器s2中的霍尔传感器40如果检测到磁钢39没有与其位于一条直线上,则说明装配未到位,cpu 令第一电机25继续旋转,霍尔传感器检测到磁钢39已与其位于一条直线上,则说明装配到位,这个信号给cpu发出模板支起到位的信号,cpu使第一电机25断电,模板装配完成;3、与此同时,竖直间距调节机构7中的液压缸7-2在cpu的控制下进油,驱动液压连杆7-1移动到位,顶紧左上模板3和左下模板4、以及右上模板5和右下模板6。第一压力传感器p1的输出的油压数值给出了对应的顶紧力的数值,由cpu与预存的压力阈值比较后,判断是否达标,若已经达标,则液压缸7-2停止供油。
41.4、然后,将锁栓机构中锁栓37的一端插入右固定座36的开口槽内,用锁销38锁紧。
42.5、与此同时,调节水平间距调节机构中的微调螺套21,精确调整水平尺寸的同时也就相应调整了左右模板间的压力数值,由cpu对各个压力传感器的数值进行判断是否达到预设的阈值,使内模装配的预紧力达到最佳状态。
43.6、内模装配完成,进行混凝土浇筑、振捣,完成后进入凝固和养护阶段。
44.7、养护工序完成后,进行拆模。打开锁栓机构中的锁栓37;cpu发出给竖直间距调节机构7中的液压缸7-2泄油的指令,液压连杆7-1回缩。同时,旋转水平间距调节机构中的微调螺套21,拆卸水平间距调节机构。
45.8、令第一电机25反转,左下驱动轴16和左上驱动轴15反向旋转,带动左下连杆10、左上连杆回缩,四块模板也随之向轴心方向移动,模板外壁和浇筑混凝土12脱离,内模即可整体从构件制作平台18上移出、完成卸模操作。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。