1.本发明涉及水下应急救援技术领域,具体涉及一种便携式水域失踪者高速搜索与定位探测装置及方法。
背景技术:
2.近几年,全国范围内洪涝灾害频发,城市内涝屡次发生,造成大量水域失踪人员无法快速的搜索和定位。除此之外,随着城市环境不断提升,市内景观河道、湖泊、水库等底被开发成的休闲娱乐场所,尤其在南方水域发达的地区,每年的溺水事件频发,溺水者一体的快速搜索、定位、打捞和善后工作也成为了消防救援部门水域救援领域重要的职责之一。
3.通常情况下,民间对于溺水人员的搜探主要采取滚钩、潜水员摸探等方式进行,遇难者家属和救援人员都承受着巨大的心理压力,而且往往搜探效果不佳。专业救援队伍,一般会采用冲锋舟或者其他大型船舶,搭载专业的侧扫声呐进行,搜探过程也需要多人配合完成,而且在复杂水域对于搜救人员的安全也难以得到保障。
技术实现要素:
4.针对现有技术的不足,本发明提出一种便携式水域失踪者高速搜索与定位探测装置,包括无人水面艇、计算机以及安装在无人水面艇上的侧扫声呐、卫星定位系统、无线数传模块,其中侧扫声呐位于水下;所述侧扫声呐、卫星定位系统分别通过无线数传模块与计算机无线连接,无人水面艇配备有遥控器,位于岸上的使用者通过遥控手中的遥控器,根据定位的目标位置控制无人水面艇在目标范围内进行目标物的搜索与定位探测;
5.所述侧扫声呐用于采集水下的图像数据,并将图像数据传输给计算机;
6.所述卫星定位系统用于定位卫星定位系统自身的位置信息p(x0,y0),并传输给计算机;
7.所述无线数传模块用于传输无线信号;
8.所述计算机用于生成图像数据的瀑布图,可视化显示水底;
9.所述无线数传模块包括交换机、网桥;侧扫声呐、卫星定位系统分别与交换机连接,交换机与网桥连接,通过网桥传输无线信号。
10.所述计算机用于根据定位卫星定位系统自身的位置信息p(x0,y0)计算侧扫声呐的位置信息p'(x1,y1),根据位置信息p'(x1,y1)生成目标物的位置p
″
(x2,y2);
[0011][0012]
其中,b
x
为侧扫声呐的安装位置相对于卫星定位系统的安装位置在x轴方向上的位移量;by为侧扫声呐的安装位置相对于卫星定位系统的安装位置在y轴方向上的位移量;
[0013]
所述根据定位的目标物位置控制无人水面艇在目标范围内进行失踪者的搜索与定位探测,具体表述为:计算机接收到实时传送的图像数据后,进行均衡化处理生成瀑布图,通过瀑布图直观显示水底情况,当在瀑布图上发现目标物时,控制无人水面艇在位置p
″
(x2,y2)所处的水域内航行,通过侧扫声呐从不同角度对目标物进行扫测,采集不同角度的图像数据。
[0014]
一种便携式水域失踪者高速搜索与定位探测方法,基于便携式水域失踪者高速搜索与定位探测装置实现,包括:
[0015]
步骤1:操作者遥控无人水面艇在水面上航行,侧扫声呐实时采集水底的图像数据;
[0016]
步骤2:对图像数据进行均衡化处理后生成瀑布图,用于直观显示水底情况;
[0017]
步骤3:当在瀑布图上发现目标时,根据卫星定位系统定位的自身位置信息p(x0,y0)得到目标物的位置p
″
(x2,y2);
[0018]
步骤4:操作者遥控无人水面艇在位置p
″
(x2,y2)的水域内航行,侧扫声呐从不同角度对目标物进行扫射,采集不同角度的图像数据,根据不同角度的图像数据判断该目标物是否为待搜查的目标物。
[0019]
所述步骤3具体表述为:
[0020]
步骤3.1:根据定位卫星定位系统自身的位置信息p(x0,y0)计算侧扫声呐的位置信息p'(x1,y1):
[0021][0022]
其中,b
x
为侧扫声呐的安装位置相对于卫星定位系统的安装位置在x轴方向上的位移量;by为侧扫声呐的安装位置相对于卫星定位系统的安装位置在y轴方向上的位移量;
[0023]
步骤3.2:根据位置信息p'(x1,y1)生成目标物的位置p
″
(x2,y2):
[0024][0025]
其中,h为侧扫声呐距离水底的距离,s为侧扫声呐与目标物之间的距离,a为侧扫声呐的扫射角度。
[0026]
本发明的有益效果是:
[0027]
本发明提出了一种便携式水域失踪者高速搜索与定位探测装置及方法,以当前救援领域普遍采用的无人水面艇为载体,集成小型化的侧扫声呐、卫星定位系统,实现了远程水下探测和目标定位的目的,可以大大提高对水下溺水者的搜索和定位效率,同时大大降低了的搜救人员的安全风险。与无人船搭载侧扫声呐进行水下搜探相比,本发明的优势在于便携性和使用性更强,既发挥动力救生圈快速营救的优势,又能作为遥控航行平台进行失踪者的快速搜索,大大提升救援效率。
附图说明
[0028]
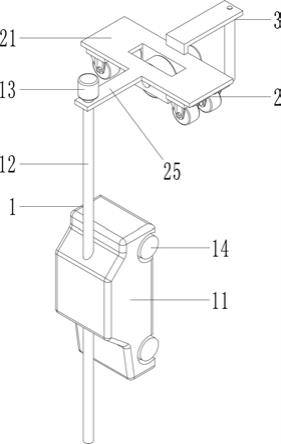
图1为本发明中便携式水域失踪者高速搜索与定位探测装置结构示意图。
[0029]
图2为本发明中便携式水域失踪者高速搜索与定位探测装置结构安装示意图;
[0030]
图3为本发明中确定目标物位置的原理图;
[0031]
图中,101、侧扫声呐;102、无线数传模块;103、卫星定位系统;201、侧扫声呐固定装置;202、防水安全箱;203、无人水面艇。
具体实施方式
[0032]
下面结合附图和具体实施实例对发明做进一步说明。
[0033]
如图1~2所示,本发明提出一种便携式水域失踪者高速搜索与定位探测装置,包括无人水面艇203、计算机以及安装在无人水面艇203上的侧扫声呐101、卫星定位系统103、无线数传模块102,其中侧扫声呐101位于水下,通过固定装置201固定在无人水面艇203上;为了保证使用的安全性,无线数传模块102与卫星定位系统103安装在防水安全箱202内;所述侧扫声呐101、卫星定位系统103分别通过无线数传模块102与计算机无线连接,无人水面艇203配备有遥控器,位于岸上的使用者通过遥控手中的遥控器,根据定位的目标位置控制无人水面艇203在目标范围内进行目标物的搜索与定位探测;
[0034]
所述侧扫声呐用于采集水下的图像数据,并将图像数据传输给计算机;
[0035]
所述卫星定位系统用于定位卫星定位系统自身的位置信息p(x0,y0),并传输给计算机;
[0036]
所述无线数传模块用于传输无线信号;
[0037]
所述计算机用于生成图像数据的瀑布图,可视化显示水底的图像信息;
[0038]
本实施例中,无线数传模块具体包括交换机、网桥;侧扫声呐、卫星定位系统分别与交换机连接,交换机与网桥连接,通过网桥传输无线信号。
[0039]
所述计算机用于根据定位卫星定位系统自身的位置信息p(x0,y0)计算侧扫声呐的位置信息p'(x1,y1),根据位置信息p'(x1,y1)生成目标物的位置p
″
(x2,y2);
[0040][0041]
其中,b
x
为侧扫声呐的安装位置相对于卫星定位系统的安装位置在x轴方向上的位移量;by为侧扫声呐的安装位置相对于卫星定位系统的安装位置在y轴方向上的位移量;
[0042]
所述根据定位的目标物位置控制无人水面艇在目标范围内进行失踪者的搜索与定位探测,具体表述为:计算机接收到实时传送的图像数据后,进行均衡化处理生成瀑布图,通过瀑布图直观显示水底情况,当在瀑布图上发现目标物时,控制无人水面艇在位置p
″
(x2,y2)所处的附近水域内航行,通过侧扫声呐从不同角度对目标物进行扫测,采集不同角度的图像数据。根据不同角度的图像数据判断该目标物是否为待搜查的真实目标物。由于单一方向拍摄的图像不一定能确定某一目标物是否为待搜索的真实目标物,所以需要先锁定疑似目标物,然后对疑似目标物进行不同角度的扫测,通过多角度采集的图像综合判断该疑似目标物是否为待搜查的真实目标物。
[0043]
一种便携式水域失踪者高速搜索与定位探测方法,基于便携式水域失踪者高速搜索与定位探测装置实现,包括:
[0044]
步骤1:操作者遥控无人水面艇在水面上航行,侧扫声呐实时采集水底的图像数据;
[0045]
步骤2:对图像数据进行均衡化处理后生成瀑布图,用于直观显示水底情况;
[0046]
步骤3:当在瀑布图上发现目标时,根据卫星定位系统定位的自身位置信息p(x0,y0)得到目标物的位置p
″
(x2,y2);
[0047]
步骤4:操作者遥控无人水面艇在位置p
″
(x2,y2)的水域内航行,侧扫声呐从不同角度对目标物进行扫射,采集不同角度的图像数据,根据不同角度的图像数据判断该目标物
是否为待搜查的目标物。
[0048]
所述步骤3具体表述为:
[0049]
步骤3.1:根据定位卫星定位系统自身的位置信息p(x0,y0)计算侧扫声呐的位置信息p'(x1,y1):
[0050][0051]
其中,b
x
为侧扫声呐的安装位置相对于卫星定位系统的安装位置在x轴方向上的位移量;by为侧扫声呐的安装位置相对于卫星定位系统的安装位置在y轴方向上的位移量;
[0052]
步骤3.2:根据位置信息p'(x1,y1)生成目标物的位置p
″
(x2,y2);如图3所示,图中h为侧扫声呐距离水底的距离,s为侧扫声呐与目标物之间的距离,a为侧扫声呐的扫射角度,根据函数关系可以计算出目标物的位置p
″
(x2,y2);
[0053][0054]
其中,h为侧扫声呐距离水底的距离,s为侧扫声呐与目标物之间的距离,a为侧扫声呐的扫射角度。
[0055]
本实施例中无人水面艇通过配备的遥控器控制航行路线。操作人员在岸边通过遥控器控制无人水面艇在水域上航行,通过侧扫声呐实时采集水底的图像数据,卫星定位系统实时获取定位的位置信息,然后通过无线数传模块传输给计算机,计算机中安装有侧扫声呐的上位机软件hydrosonar软件,将接收到的图像数据进行实时成图显示,生成瀑布图直观再现水底情况,通过遥控器改变无人水面艇的航行方向,可以多角度的采集图像数据。
[0056]
搜索过程中如果在瀑布图上发现某一目标物为疑似目标(比如搜查溺水者),根据卫星定位系统定位的自身位置信息换算为侧扫声呐的位置信息,利用hydrosonar软件生成该疑似目标物的位置信息,操作人员可以根据该位置信息锁定搜查的目标范围,控制无人水面艇在该范围的水域内航行,对该疑似目标物进行不同角度的扫测,采集不同角度的图像,进一步确定该疑似目标物是否是待搜查的溺水者。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。