1.本发明属于传感器技术领域,具体涉及一种触觉传感器,尤其是一种可变刚度柔性触觉传感器,根据传感器与物体接触前后系统共振频率的变化来判断被测物体的刚度。
背景技术:
2.触觉作为人类感知外部环境信息的重要方式之一,可感知接触对象和外部环境的多种特征,但是开发具有人手所有品质的智能传感器仍面临极大的挑战,尤其是在表面纹理、刚度、摩擦等高级别物体属性的触觉感知方面。物体的刚度在机器人实际应用中具有重要作用,例如,在物体抓握方面,机器人基于物体刚度信息实时调整抓握力的大小,有助于实现稳定抓取;在医疗诊断方法,组织的软硬程度可辅助机器人有效地区分软组织和肿瘤区域。
3.目前,触觉传感器的刚度测量原理主要可分为:基于力/压入位移的静态测量和基于系统共振频率偏移的动态测量。虽然静态测量具有直观物理意义,但是在压入位移中消除刚体位移的影响,往往需要额外增加固定的参考系,限制了传感器的小型化。因此,基于动态测量原理的触觉传感器愈发受到关注。sadao omata等人设计的用于机器人的触觉传感器,使用两片压电陶瓷沾在一起分别作为驱动元件和敏感元件,前者给其施加高达几百khz的高频交流电压以产生振荡,而后者用来实时拾取频率信号,当传感器接触组织时,通过反馈回来的接触组织前后传感器共振频率变化,来反映被测组织的弹性模量等信息;yoshinobu murayama等人利用相似原理将多个刚度测量单元形成阵列式结构使得触觉传感器能够进行大范围刚度检测,当对含有病变肿瘤的生物组织进行测量时,可以得到被测范围内的刚度分布,进而可以得到肿瘤的大概位置和大小等信息;parag r.dhar等人在传感器中加入弹簧与质量块,大大降低了传感器系统的共振频率但因此不利于小型化,通过检测整个传感器机电系统的共振频率变化,即可得到组织刚度信息。
4.纵观该类触觉传感器,存在如下亟待解决的问题:1.降低初始系统共振频率,以减少质量效应的影响;2.缩短触头的尺寸,以实现小型化;3.实现刚度测量范围的动态调节,以面向不同的应用场景。
技术实现要素:
5.本发明上的目的在与克服现有技术的不足,提出一种可变刚度柔性触觉传感器系统及其控制方法,采用了可变刚度柔性触头,首先其能够降低传感器系统初始共振频率,同时可以减少对接触物体的破环。其次可变刚度柔性触头可以避免为减低频率而设计的结构复杂度,有利于传感器的小型化。最后,为了能够实现刚度测量范围的动态调节,采用可变刚度的触头,以改变气压来改变其刚度。
6.本发明公开一种可变刚度柔性触觉传感器系统,包括:
7.可变刚度系统,所述可变刚度系统设有可变刚度柔性触头和气压调节系统,所述气压调节系统用于调节所述可变刚度柔性触头内的气压,通过气压变化调整所述可变刚度
柔性触头的刚度;
8.驱动测量系统,所述驱动测量系统用于采集所述可变刚度柔性触头的初始气压以及所述可变刚度柔性触头触碰待测物体时的气压变化量和共振频率;
9.刚度辨识深度学习模型,所述刚度辨识深度学习模型用于根据初始气压、气压变化量和共振频率计算待测物体的刚度。
10.进一步地,所述可变刚度柔性触头由外至内依次设有弹性外壳、不可伸展膜、粉末颗粒层和弹性膜,所述弹性膜连接气压调节系统。
11.进一步地,所述气压调节系统包括管道、第一电磁阀、第二电磁阀、储气仓、气泵和气压控制系统,所述管道一端连接所述储气仓和气泵,另一端连接所述弹性膜,所述气压控制系统通过第一电磁阀控制所述气泵向弹性膜内充气,所述储气仓作为所述弹性膜的气压缓冲区,用于维持所述弹性膜内气压平衡,所述气压控制系统通过控制第二电磁阀对弹性膜放气。
12.进一步地,所述弹性外壳为硅胶外壳,所述弹性膜为硅胶膜。
13.进一步地,所述管道为硅胶软管。
14.进一步地,所述驱动测量系统包括敏感元件、相位偏移电路和共振频率采集系统,所述相位偏移电路通过所述敏感元件连接所述可变刚度柔性触头,所述共振频率采集系统连接所述相位偏移电路,所述共振频率采集系统用于通过敏感元件和相位偏移电路采集所述可变刚度柔性触头触碰待测物体时的共振频率。
15.进一步地,所述敏感元件包括振荡器和拾取器,所述振荡器连接相位偏移电路的输入端,所述拾取器连接相位偏移电路的输出端,以构成自激振荡电路。
16.进一步地,所述驱动测量系统还包括用于采集所述可变刚度柔性触头内初始气压和气压变化量的气压传感器。
17.相应地,一种可变刚度柔性触觉传感器系统的控制方法:
18.采集可变刚度柔性触头的初始气压以及所述可变刚度柔性触头触碰待测物体时的气压变化量和共振频率;
19.将初始气压、气压变化量和共振频率输入预先建立的刚度辨识深度学习模型计算待测物体的刚度;
20.其中计算待测物体刚度的方法:
21.步骤1,收集低保真数据集,运用有限元分析建立机电耦合模型,设置不同的边界条件,进行仿真运算,分析并记录在不同刚度可变刚度柔性触头下的物理变量以及与物体刚度相关的频率,作为低保真的数据集,记为其中x=[p1,p2,p3],为输入变量;p1、p2、p3分别代表初始气压、共振频率和气压变化量,y为物体刚度,作为变量;n
l
为低保真度数据数量;
[0022]
步骤2,收集高保真度数据集,对多组实物样本在不同气压条件下,进行物体测量刚度实物实验,记录气压条件及相应的物理变量,收集到的数据集作为高保真度数据集,将其记为其中nh为高保真度数据数量;
[0023]
步骤3,使用多保真度神经网络,利用低保真度数据集和高保真度数据集训练该神经网络,预测所使用的多保真度神经网络主要含有三个全连接子神经网络nn
l
、nnh和基于物
理信息神经网络pinn;
[0024]
步骤4,输入测量刚度过程中的实际参数x,得到的pinn输出值y
p
(x)即为待测物体刚度值。
[0025]
进一步地,其中步骤3的具体步骤如下:
[0026]
步骤3.1,给定的低保真度数据将作为输入变量,作为标签值,训练低保真度神经网络nn
l
,其输出值记为y
l
(x);
[0027]
步骤3.2,给定高保真度的数据将作为nn
l
的输入值,得到的低保真度预测值将作为输入变量,作为标签值,训练高保真度神经网络nnh,其输出值记为yh(x);其中nnh分为两个全连接子神经网络:无激活函数的线性部分nn
h_l
和带有激活函数的非线性部分nn
h_nl
,输出值分别记为f
l
(x,y
l
)和f
nl
(x,y
l
),高保真预测值yh的表达式如式1所示:
[0028]
yh(x,y
l
)=f
l
(x,y
l
) f
nl
(x,y
l
)
ꢀꢀꢀ
(2)
[0029]
步骤3.3,给定通过上述神经网络nn
l
和nnh,得到所有输入点的高保真度的预测值根据测量刚度机电耦合物理场对应的偏微分方程,建立神经网络pinn,将作为输入变量,作为标签值,训练pinn,其输出值记为y
p
(x);
[0030]
步骤3.4,多保真度神经网络中的损失函数采用均方误差(mse),其具体公式如式2所示:
[0031][0032]
式中,n为数据集中数据的数量,ai与fi分别为第i个点的真实值与预测值。
[0033]
本发明具有的有益效果:
[0034]
1、能够降低传感器系统初始共振频率,同时可以减少对接触物体的破环;
[0035]
2、可变刚度柔性触头可以避免为减低频率而设计的结构复杂度,有利于传感器的小型化;
[0036]
3、采用可变刚度的触头,以改变气压来改变其刚度,能够实现刚度测量范围的动态调节。
附图说明
[0037]
图1是本发明中柔性触头结构立体示意图;
[0038]
图2是本发明中柔性触头剖面示意图;
[0039]
图3是本发明中柔性触头结构示意图;
[0040]
图4是本发明中柔性触头俯视示意图;
[0041]
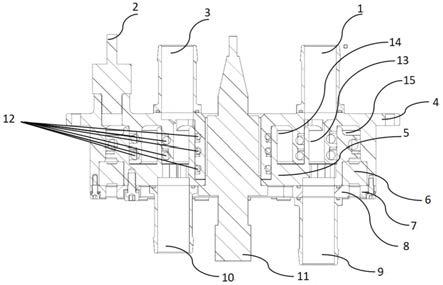
图5是本发明结构示意图;
[0042]
图6是本发明相位偏移电路示意图;
[0043]
图7是本发明中有限元仿真示意图;
[0044]
图8是本发明中气压与触头形变的关系示意图;
[0045]
图9是本发明中触头形变与共振频率的关系示意图;
[0046]
图10是本发明中深度学习算法原理示意图。
[0047]
其中:1-敏感元件,11-振荡器,12-拾取器,2-管道,3-可变刚度柔性触头,31-弹性外壳,32-不可伸展膜,33-粉末颗粒层,34-弹性膜,4-压力传感器,51-第一电磁阀,52-第二电磁阀,6-储气仓,7-气泵,8-相位偏移电路,9-共振频率采集系统,10-气压控制系统。
具体实施方式
[0048]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0049]
如图5所示,本发明的一种可变刚度柔性触觉传感器系统,包括:
[0050]
可变刚度系统,所述可变刚度系统设有可变刚度柔性触头3和气压调节系统,所述气压调节系统用于调节所述可变刚度柔性触头3内的气压,通过气压变化调整所述可变刚度柔性触头3的刚度;如图1-4所示,所述可变刚度柔性触头3由外至内依次设有弹性外壳31、不可伸展膜32、粉末颗粒层33和弹性膜34,所述弹性膜34连接气压调节系统,弹性外壳31为硅胶外壳,所述弹性膜34为硅胶膜,具备良好的弹性和耐腐蚀性;所述气压调节系统包括管道2、第一电磁阀51、第二电磁阀52、储气仓6、气泵7和气压控制系统10,所述管道2一端连接所述储气仓6和气泵7,另一端连接所述弹性膜34,所述气压控制系统10通过第一电磁阀51控制所述气泵7向弹性膜34内充气,所述储气仓6作为所述弹性膜34的气压缓冲区,用于维持所述弹性膜34内气压平衡,所述气压控制系统10通过控制第二电磁阀52对弹性膜34放气。所述管道2为硅胶软管具备良好的密封性和耐腐蚀性。
[0051]
驱动测量系统,所述驱动测量系统用于采集所述可变刚度柔性触头3的初始气压以及所述可变刚度柔性触头3触碰待测物体时的气压变化量和共振频率;所述驱动测量系统包括敏感元件1、相位偏移电路8和共振频率采集系统9,所述相位偏移电路8通过所述敏感元件1连接所述可变刚度柔性触头3,所述共振频率采集系统9连接所述相位偏移电路8,所述共振频率采集系统9用于通过敏感元件1和相位偏移电路8采集所述可变刚度柔性触头3触碰待测物体时的共振频率。所述敏感元件1包括振荡器11和拾取器12,如图6所示,所述振荡器11连接相位偏移电路8的输入端,所述拾取器12连接相位偏移电路8的输出端,以构成自激振荡电路。
[0052]
所述驱动测量系统还包括用于采集所述可变刚度柔性触头3内初始气压和气压变化量的气压传感器4。同时所述气压传感器4连接所述气压控制系统10,所述气压控制系统10通过所述气压传感器4的采集数据来精确控制气压。
[0053]
刚度辨识深度学习模型,所述刚度辨识深度学习模型用于根据初始气压、气压变化量和共振频率计算待测物体的刚度。
[0054]
当用传感器系统测量物体时,由于可变刚度柔性触头3与物体相接触,使得传感器机电共振系统频率发生变化,同时由于是柔性触头,在初始气压给定后刚度一定,而当与物体接触后触头发生形变,其空腔内气压会有所变化,此时记录气压变化量和共振频率变化量,气压变化量则用来评估柔性触头形变对共振频率的影响。由于气压变化会改变柔性触头的刚度,而柔性触头会影响传感器系统共振频率变化,根据气压传感器4以及从所述相位偏移电路8所得数据,建立起气压与共振频率之间的模型。如图7所示是柔性触头有限元仿
真图例,得到图8与图9结果分别是气压与触头形变和触头形变与共振频率的关系图。
[0055]
可变刚度柔性触头3在不同刚度,接触不同刚度的物体时共振频率的变化会有所不同,当其接触物体进行刚度的测量时建立多个不同气压导致的不同柔性触头刚度的测量值作为训练集用来预测刚度,而在后续实际应用中可以根据物体的大概刚度,然后根据深度学习刚度辨识模型来逆向的选取合适的柔性触头刚度,使得测量物体刚度结果更加准确,以此可以扩大测量物体刚度的范围。
[0056]
为了减少实验标定次数采用多保真神经网络,通过有限元仿真以及实验标定数据建立深度学习模型如图10所示,计算出物体刚度的具体步骤如下:
[0057]
步骤1,收集低保真数据集,运用有限元分析建立机电耦合模型,设置不同的边界条件,进行仿真运算,分析并记录在不同刚度柔性触头下的物理变量以及与物体刚度相关的频率,作为低保真的数据集,记为其中x=[p1,p2,p3],为输入变量;p1、p2、p3分别代表气压、共振频率和气压变化量,y为物体刚度,作为预测变量;n
l
为低保真度数据数量;
[0058]
步骤2,收集高保真度数据集,对多组实物样本在不同气压条件下,进行物体测量刚度实物实验,记录气压条件及相应的物理变量,收集到的数据集作为高保真度数据集,将其记为其中nh为高保真度数据数量;
[0059]
步骤3,使用多保真度神经网络,利用低保真度数据集和高保真度数据集训练该神经网络,预测所使用的多保真度神经网络主要含有三个全连接子神经网络nn
l
、nnh和基于物理信息神经网络pinn;
[0060]
步骤4,实际使用中,输入测量刚度过程中的实际参数x,得到的pinn输出值y
p
(x)即为对应的物体刚度值。
[0061]
其中步骤3的具体步骤如下:
[0062]
步骤3.1,给定的低保真度数据将作为输入变量,作为标签值,训练低保真度神经网络nn
l
,其输出值记为y
l
(x);
[0063]
步骤3.2,给定高保真度的数据将作为nn
l
的输入值,得到的低保真度预测值将作为输入变量,作为标签值,训练高保真度神经网络nnh,其输出值记为yh(x);其中nnh分为两个全连接子神经网络:无激活函数的线性部分nn
h_l
和带有激活函数的非线性部分nn
h_nl
,输出值分别记为f
l
(x,y
l
)和f
nl
(x,y
l
),高保真预测值yh的表达式如式1所示:
[0064]
yh(x,y
l
)=f
l
(x,y
l
) f
nl
(x,y
l
)
[0065]
步骤3.3,给定通过上述神经网络nn
l
和nnh,得到所有输入点的高保真度的预测值根据测量刚度机电耦合物理场对应的偏微分方程,建立神经网络pinn,将作为输入变量,作为标签值,训练pinn,其输出值记为y
p
(x);
[0066]
步骤3.4,多保真度神经网络中的损失函数采用均方误差(mse),其具体公式如式2所示:
[0067][0068]
式中,n为数据集中数据的数量,ai与fi分别为第i个点的真实值与预测值。
[0069]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。