技术特征:
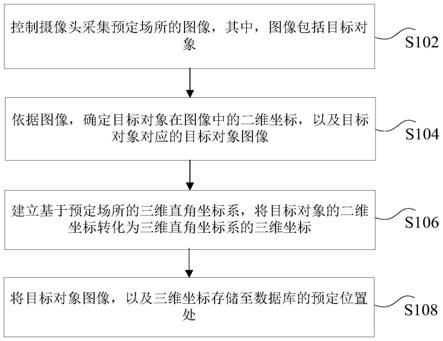
1.一种对象处理方法,其特征在于,包括:控制摄像头采集预定场所的图像,其中,所述图像包括目标对象;依据所述图像,确定所述目标对象在所述图像中的二维坐标,以及所述目标对象对应的目标对象图像;建立基于所述预定场所的三维直角坐标系,将所述目标对象的二维坐标转化为所述三维直角坐标系的三维坐标;将所述目标对象图像,以及所述三维坐标存储至数据库的预定位置处。2.根据权利要求1所述的方法,其特征在于,所述依据所述图像,确定所述目标对象在所述图像中的二维坐标,以及所述目标对象对应的目标对象图像,包括:依据所述图像,确定所述目标对象在所述图像中的二维坐标;依据所述二维坐标,截取所述图像中目标对象对应的对象图像;矫正所述对象图像,得到所述目标对象对应的目标对象图像。3.根据权利要求1所述的方法,其特征在于,所述建立基于所述预定场所的三维直角坐标系,将所述目标对象的二维坐标转化为所述三维直角坐标系的三维坐标,包括:建立基于所述预定场所的三维直角坐标系,获取所述摄像头的摄像角度与摄像点位;依据所述摄像角度与摄像点位,将所述目标对象的二维坐标转化为所述三维直角坐标系的三维坐标。4.根据权利要求1所述的方法,其特征在于,还包括:依据所述目标对象图像,提取所述目标对象图像的特征;依据所述目标对象图像的特征,确定与所述目标对象图像匹配的标签,其中,所述标签与所述特征相对应,所述标签包括以下至少之一:名称标签,用途标签,颜色标签;将所述目标对象图像匹配的标签存储至所述数据库的所述预定位置处。5.根据权利要求4所述的方法,其特征在于,所述依据所述目标对象图像的特征,确定与所述目标对象图像匹配的标签,包括:依据所述目标对象图像的特征,确定与所述目标对象图像匹配的待定标签;确定所述待定标签与所述目标对象图像的特征的匹配度;确定所述匹配度大于预定阈值的待定标签为与所述目标对象图像匹配的标签。6.根据权利要求1所述的方法,其特征在于,所述控制摄像头采集所述预定场所的图像,包括:以预定周期控制所述摄像头采集所述预定场所的图像,记录采集所述预定场所的图像的时间。7.一种对象处理装置,其特征在于,包括:采集模块,用于控制摄像头采集预定场所的图像,其中,所述图像包括目标对象;确定模块,用于依据所述图像,确定所述目标对象在所述图像中的二维坐标,以及所述目标对象对应的目标对象图像;转化模块,用于建立基于所述预定场所的三维直角坐标系,将所述目标对象的二维坐标转化为所述三维直角坐标系的三维坐标;存储模块,用于将所述目标对象图像,以及所述三维坐标存储至数据库的预定位置处。8.一种电子设备,其特征在于,包括:
处理器;用于存储所述处理器可执行指令的存储器;其中,所述处理器被配置为执行所述指令,以实现如权利要求1至6中任一项所述的对象处理方法。9.一种计算机可读存储介质,其特征在于,当所述计算机可读存储介质中的指令由电子设备的处理器执行时,使得电子设备能够执行如权利要求1至6中任一项所述的对象处理方法。10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至6中任一项所述的对象处理方法。
技术总结
本发明公开了一种对象处理方法、装置、电子设备及计算机可读存储介质。其中,该方法包括:控制摄像头采集预定场所的图像,其中,图像包括目标对象;依据图像,确定目标对象在图像中的二维坐标,以及目标对象对应的目标对象图像;建立基于预定场所的三维直角坐标系,将目标对象的二维坐标转化为三维直角坐标系的三维坐标;将目标对象图像,以及三维坐标存储至数据库的预定位置处。本发明解决了相关技术中在预定场所内寻找物品时,出现的难以及时找到该物品的技术问题。该物品的技术问题。该物品的技术问题。
技术研发人员:熊剑 岑淑娟 宋德超
受保护的技术使用者:珠海联云科技有限公司
技术研发日:2021.12.24
技术公布日:2022/4/1
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。