1.本公开涉及直接驱动马达。
背景技术:
2.公知有一种包括定子和具有磁体的转子的电动机(参照专利文献1)。在专利文献1的电动机中,转子固定于负载轴,在负载轴安装有风扇,因此,转子、负载轴和风扇一体地旋转。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开平4-331438号公报
技术实现要素:
6.发明要解决的问题
7.在专利文献1所记载的电动机中,磁体的在负载轴的轴线方向上的一端部位于比定子的轴线方向上的一端部靠轴线方向的一侧的位置。因而,在磁体的轴线方向上的一端部的径向外侧未配置有定子,因此从磁体产生的磁通(磁场)可能无法充分地向定子传输。
8.本公开是鉴于上述的课题而完成的,其目的在于,提供一种能够使磁体所产生的磁通更多地向定子铁心传输而减少磁通泄漏的直接驱动马达。
9.用于解决问题的方案
10.为了达到上述的目的,对于一技术方案的直接驱动马达,该直接驱动马达包括:定子,其具有沿着绕中心轴线的周向配置的定子铁心;以及转子,其具有转子铁心和磁体,该转子铁心相对于所述定子铁心配置于与所述中心轴线正交的径向的外侧或者内侧,该磁体固定于该转子铁心且与所述定子铁心在径向上相对地配置,将所述中心轴线的轴线方向的一方设为第1方向,将与第1方向相反的方向设为第2方向,所述磁体的沿着轴线方向从第1方向上的端到第2方向上的端的第1距离小于所述定子铁心的沿着轴线方向从第1方向上的端到第2方向上的端的第2距离,从所述磁体的第1方向上的端朝向第2方向离开所述第1距离的一半距离的第1位置与从所述定子铁心的第1方向上的端朝向第2方向离开所述第2距离的一半距离的第2位置在轴线方向上一致。
11.因而,在由于对dd马达的各构成部件进行装配时产生的轴线方向上的尺寸的偏差而导致磁体与定子铁心的轴线方向位置偏移的情况下,也能够使磁体所产生的磁通(磁场)更多地向定子铁心传输而减少磁通泄漏。因此,能够得到更大的输出,进而,即使是更小的磁体也能够使转子旋转。另外,第1位置与第2位置在轴线方向上一致,因此,无论是磁体相对于定子铁心向轴线方向的一侧偏移还是磁体相对于定子铁心向轴线方向上的另一侧偏移,都能使磁体所产生的磁通(磁场)更多地向定子铁心传输。
12.作为优选的技术方案,所述定子铁心和所述转子铁心具有由多个钢板在轴线方向层叠而成的层叠钢板。在通过车床加工对金属材料进行切削加工来制作定子铁心或者转子
铁心的情况下,使外周面形成为复杂的形状是困难的。但是,对于层叠了冲裁加工后的钢板而成的层叠钢板的情况,使外周面形成为复杂的形状是容易的。
13.作为优选的技术方案,所述定子铁心的所述层叠钢板和所述转子铁心的所述层叠钢板是层叠相同张数的具有相同厚度的钢板而成的。由此,在使用卷材的钢板来制造定子铁心和转子铁心的层叠钢板的情况下,能够由相同的卷材来制造定子铁心用的层叠钢板的钢板和转子铁心用的层叠钢板的钢板。
14.作为优选的技术方案,所述转子铁心的所述层叠钢板是由预定张数的第1单元在轴线方向上堆叠多个而构成的,在每1个所述第1单元各固定有1个所述磁体,所述磁体的沿着轴线方向从第1方向上的端到第2方向上的端的第3距离小于所述第1单元的沿着轴线方向从第1方向上的端到第2方向上的端的第4距离。由此,能够在定子铁心的轴线方向上的长度大于磁体的轴线方向上的长度的状态下构成轴线方向上的长度不同的转子铁心的多个变化。
15.作为优选的技术方案,所述第4距离与所述第3距离之间的差为1张所述钢板的厚度的量。由此,能够利用最少张数的钢板在定子铁心的轴线方向上的长度大于磁体的轴线方向上的长度的状态下构成轴线方向上的长度不同的转子铁心的多个变化。
16.作为优选的技术方案,所述定子铁心的所述层叠钢板是由预定张数的层叠钢板的第2单元在轴线方向上堆叠多个而得到的,所述第3距离小于所述第2单元的沿着轴线方向从第1方向上的端到第2方向上的端的第5距离。由此,能够在定子铁心的轴线方向上的长度大于磁体的轴线方向上的长度的状态下构成轴线方向上的长度不同的定子铁心的多个变化。
17.作为优选的技术方案,所述第5距离与所述第3距离之间的差为1张所述钢板的厚度的量。由此,能够利用最少张数的钢板在定子铁心的轴线方向上的长度大于磁体的轴线方向上的长度的状态下构成轴线方向上的长度不同的定子铁心的多个变化。
18.发明的效果
19.根据本公开,能够提供一种能够使磁体所产生的磁通更多地向定子铁心传输而减少磁通泄漏的直接驱动马达。
附图说明
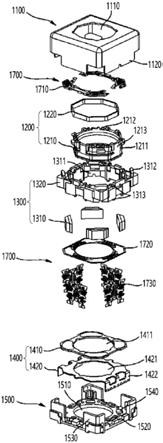
20.图1是概略性地表示实施方式的直接驱动马达的整体结构的剖视图。
21.图2是概略性地表示实施方式的马达部的整体结构的立体图。
22.图3是将图2的局部放大了的立体图。
23.图4是表示马达部的剖面的概略图。
24.图5是表示定子铁心、转子铁心和永磁体的上下位置关系的概略图。
25.图6是概略性地表示变形例的马达部的整体结构的立体图。
具体实施方式
26.参照附图详细地说明用于实施本发明的方式(实施方式)。本发明并不限定于以下的实施方式所记载的内容。另外,在以下所记载的构成要素中,包含本领域技术人员能容易想到的要素和实质上相同的要素。此外,能够适当地组合以下所记载的构成要素。
27.[实施方式]
[0028]
首先,对实施方式进行说明。图1是概略性地表示直接驱动马达的整体结构的剖视图。实施方式的直接驱动马达1能够在不使减速机构(例如,减速齿轮、传动带等)介入的情况下将旋转力直接地向转子传递,使该转子旋转。
[0029]
作为直接驱动马达1(以下,也称作“dd马达1”),具有外转子型、内转子型等,但在本实施方式中,作为一个例子而在图1中示出了内转子型的dd马达1。
[0030]
dd马达1包括基座2、旋转体3(也叫作马达输出轴)和马达部4。
[0031]
基座2具有底部21、倾斜部22和纵壁部23。基座2是以中心轴线ax为中心的环状的构件。底部21载置于基台10上且固定于基台10。倾斜部22随着从底部21的径向内侧的端部21a向径向内侧去而向斜上方延伸。纵壁部23从倾斜部22的上端部22a沿着中心轴线ax的轴线方向地向上方延伸。
[0032]
纵壁部23是以中心轴线ax为中心的圆筒状的构件。第1保持体24配置于纵壁部23的上部。第1保持体24是以中心轴线ax为中心的圆筒状的构件。第1保持体24借助螺纹件bl1紧固于纵壁部23。在纵壁部23的径向外侧设有第1台阶部23a和第2台阶部23b。轴承100的内周部嵌合于第1台阶部23a。轴承100是以中心轴线ax为中心的环状的构件。第2保持体25载置于第2台阶部23b。第2保持体25是以中心轴线ax为中心的环状的构件。第2保持体25借助螺纹件bl2紧固于第2台阶部23b,从而利用第2保持体25和第1台阶部23a从上下方向(中心轴线ax的轴线方向)夹持轴承100的内周部。
[0033]
旋转体3具有第3保持体26和第4保持体27。旋转体3被支承为能够相对于基座2旋转。旋转体3配置于基座2的纵壁部23和第1保持体24的径向外侧。旋转体3是以中心轴线ax为中心的环状的构件。第3保持体26在径向内侧部(内周部)的下端具有第3台阶部26a。第4保持体27在径向内侧部具有第4台阶部27a。利用螺纹件bl3将第4保持体27紧固于第3保持体26,从而利用第3台阶部26a和第4台阶部27a从上下方向(中心轴线ax的轴线方向)夹持轴承100的外周部。旋转体3以中心轴线ax为中心进行旋转运动。在旋转体3安装各种工件(未图示),通过利用马达部4使旋转体3旋转,从而能够使各种工件旋转。
[0034]
在第1保持体24和第3保持体26之间设有旋转传感器5。旋转传感器5具有在径向上相对的一对构件。一对构件中的一者借助螺纹件bl4固定于第3保持体26,另一者借助螺纹件bl5固定于第1保持体24。旋转传感器5对马达部4的旋转状态(例如,旋转角度)进行检测。利用旋转传感器5,能够使安装于旋转体3的各种工件准确地旋转预定的角度,能够高精度地定位于目标位置。另外,作为旋转传感器5,例如能够应用市售的旋转变压器等检测元件。另外,旋转传感器5由设于第1保持体24的上部的圆板状的第1罩101保护而不受来自外部的影响。
[0035]
马达部4设于基座2的底部21和旋转体3之间,使旋转体3旋转。马达部4具有定子40(stator)和转子42(rotor)。定子40和转子42是以中心轴线ax为中心的环状的构件。定子40借助螺纹件bl6固定于基座2的底部21上。实施方式的马达部4具有所谓的内转子型的构造。
[0036]
定子40包括定子铁心41(stator铁心)、绝缘体43和线圈44。绝缘体43设于定子铁心41,线圈44缠绕于绝缘体43。定子铁心41的上部被环状的第2罩102覆盖。第2罩102的剖面形状呈字母l状,具有在轴线方向上延伸的纵部102a和向径向内侧延伸的横部102b。第2罩102利用螺纹件bl7固定于基座2。转子42(rotor)与定子铁心41相对地配置于定子铁心41的
径向内侧。
[0037]
转子42(rotor)包括永磁体421(权利要求中的磁体)和转子铁心422(rotor铁心)。永磁体421通过粘结而固定于转子铁心422的径向外侧。转子42借助螺纹件bl8固定于第3保持体26。
[0038]
若向线圈44通电,则通过定子40和转子42之间的磁相互作用,依据弗莱明的左手法则而能够借助转子42向旋转体3赋予旋转力。由此,能够使旋转体3和工件旋转。
[0039]
图2是概略性地表示实施方式的马达部的整体结构的立体图。图3是将图2的局部放大了的立体图。
[0040]
如图2和图3所示的那样,在实施方式中,在包含定子铁心41(stator铁心)的定子40(stator)的内周侧配置有包含永磁体421(权利要求中的磁体)和转子铁心422(rotor铁心)的转子42(rotor)。
[0041]
定子铁心41具有背轭411和齿412。背轭411和齿412为一体。背轭411为从中心轴线ax的轴线方向观察时以中心轴线ax为中心的圆环状构件。齿412从背轭411的内周面朝向中心轴线ax地向内周侧(径向内侧)突出。线圈44(参考图1)隔着绝缘体43缠绕于齿412。
[0042]
在背轭411的与齿412相对应的部位设有在轴线方向上延伸的贯通孔411a。贯通孔411a在中心轴线ax的轴线方向上延伸。在此,定子铁心41包含层叠钢板。层叠钢板是将通过冲裁加工而成形的具有背轭411、齿412以及贯通孔411a的1张钢板在轴线方向上重叠多个而构成的。
[0043]
贯通孔411a例如用于铆接加工。即,例如,通过使预定张数的多个钢板层叠,将铆钉插入于贯通孔411a,之后将铆钉在轴线方向上压溃,从而制作第2单元413、414。通过使多个第2单元413、414在轴线方向上层叠,从而制作定子铁心41。在第2单元414的轴线方向的一侧(图2、图3中的上侧)堆叠第2单元413。
[0044]
在本实施方式中,第2单元413和第2单元414由相同厚度且张数分别相同的钢板构成。另外,在图2、图3中,为了容易地目视确认第2单元413和第2单元414之间的分界s1,方便起见地以粗线示出,但实际上是相同厚度的钢板沿着轴线方向无间隙地层叠。另外,也可以是,不经过第2单元413、414而使全部张数的钢板例如利用铆钉进行铆接(日文:
かしめ
)来对它们进行固定,从而制作定子铁心41。对于构成定子铁心41的钢板的材质,没有特别的限定,能够应用各种材质的钢板,例如优选硅钢板。
[0045]
转子42包含转子铁心422和永磁体421(权利要求的磁体)。转子铁心422也由将通过冲裁加工成形为期望形状的1张钢板在轴线方向上重叠多个而成的层叠钢板构成。在转子铁心422设有在轴线方向上延伸的贯通孔422b。
[0046]
贯通孔422b例如用于铆接加工。即,例如,通过使预定张数的多个钢板层叠,将铆钉插入于贯通孔422b,之后将铆钉在轴线方向上压溃,从而制作第1单元425、426。通过在第1单元426的轴线方向的一侧(图2、3中的上侧)堆叠第1单元425来构成转子铁心422。在本实施方式中,第1单元425和第1单元426由相同厚度且张数分别相同的钢板构成。另外,在图2、图3中,为了容易地目视确认第1单元425和第1单元426之间的分界s2,方便起见地以粗线示出,但实际上是相同厚度的钢板沿着轴线方向无间隙地层叠。
[0047]
另外,也可以是,不经过第1单元425、426而使全部张数的钢板例如利用铆钉进行铆接(日文:
かしめ
)来对它们进行固定,从而制作转子铁心422。对于构成转子铁心422的钢
板的材质,没有特别的限定,能够应用各种材质的钢板,例如优选硅钢板。
[0048]
另外,构成转子铁心422的1张钢板的厚度与构成定子铁心41的1张钢板的厚度相同。通过使构成转子铁心422的层叠钢板的钢板的张数与构成定子铁心41的层叠钢板的钢板的张数相同,从而能够简单地使转子铁心422的层叠钢板的轴线方向上的高度(厚度)与定子铁心41的层叠钢板的轴线方向上的高度(厚度)一致。
[0049]
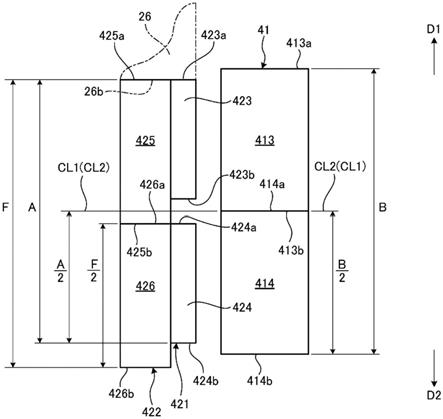
图4是表示马达部的剖面的概略图。图5是表示定子铁心、转子铁心和永磁体的上下位置关系的概略图。另外,以下,将轴线方向的一方作为第1方向d1,轴线方向的另一方作为第2方向d2。第2方向d2是与第1方向d1相反的方向。第1方向d1是图4、图5中的朝向上侧的方向,第2方向d2是图4、图5中的朝向下侧的方向。
[0050]
如图4所示的那样,定子铁心41具有第2单元413、414。第2单元413具有下表面413b和上表面413a。第2单元414具有下表面414b和上表面414a。定子铁心41的第1方向d1上的端是第2单元413的上表面413a。定子铁心41的第2方向d2上的端是第2单元414的下表面414b。
[0051]
第2单元413和第2单元414具有彼此相同的轴线方向上的高度。具体而言,第2单元413和第2单元414的轴线方向上的高度均为b/2。将第2单元413与第2单元414合起来的整个定子铁心41的轴线方向上的高度为第2距离b。即,定子铁心41的沿着轴线方向从第1方向d1上的端到第2方向d2上的端的距离为第2距离b。另外,定子铁心41的第1方向d1上的端与第2方向d2上的端之间的沿着轴线方向的中央为第2中央cl2。第2中央cl2位于与第2单元414的上表面414a和第2单元413的下表面413b相同的高度的位置。换言之,若将从定子铁心41的第1方向d1上的端朝向第2方向d2离开第2距离b的一半距离b/2的位置设为第2位置,则第2中央cl2与第2位置一致。
[0052]
如图4所示的那样,转子铁心422具有第1单元425和第1单元426。第1单元425具有下表面425b和上表面425a。第1单元426具有下表面426b和上表面426a。第1单元425的上表面425a与第3保持体26的下表面26b抵接。换言之,第1单元425的上表面425a在上下方向上由第3保持体26的下表面26b支承。由此,进行第1单元425的上表面425a的在轴线方向上的定位。转子铁心422的第1方向d1上的端为第1单元425的上表面425a。转子铁心422的第2方向d2上的端为第1单元426的下表面426b。
[0053]
第1单元425和第1单元426具有彼此相同的轴线方向上的高度。具体而言,第1单元425和第1单元426的轴线方向上的高度均为f/2。将第1单元426与第1单元425合起来的整个转子铁心422的轴线方向上的高度为f。另外,第1单元426的下表面426b位于比第2单元414的下表面414b靠下侧的位置。
[0054]
另外,永磁体421(权利要求的磁体)具有第1永磁体423(权利要求的磁体)和第2永磁体424(权利要求的磁体)。第1永磁体423固定于第1单元425的外周面。第1永磁体423具有下表面423b和上表面423a。上表面423a和上表面425a位于相同的高度。上表面423a和上表面425a位于比第2单元413的上表面413a靠下侧的位置。第2永磁体424固定于第1单元426的外周面。第2永磁体424具有下表面424b和上表面424a。上表面424a和上表面426a位于相同的高度。
[0055]
永磁体421的第1方向d1上的端为第1永磁体423的上表面423a。永磁体421的第2方向d2上的端为第2永磁体424的下表面424b。永磁体421的沿着轴线方向从第1方向d1上的端到第2方向d2上的端的距离为第1距离a。第1距离a小于定子铁心41的第2距离b。永磁体421
的第1方向d1上的端与第2方向d2上的端之间的沿着轴线方向的中央为第1中央cl1。第1中央cl1位于第1永磁体423的上表面423a与第2永磁体424的下表面424b之间的轴线方向上的中央。若将从永磁体421的第1方向d1上的端朝向第2方向d2离开第1距离a的一半距离a/2的位置设为第1位置,则第1中央cl1与第1位置一致。另外,第1中央cl1与第2中央cl2在轴线方向上一致,第1位置与第2位置也在轴线方向上一致。
[0056]
使用图5,对第2单元413、第1单元425和第1永磁体423的上下位置关系进行比较。第2单元413的第1方向d1上的端为上表面413a。第2单元413的第2方向d2上的端为下表面413b。第1单元425的第1方向d1上的端为上表面425a。第1单元425的第2方向d2上的端为下表面425b。另外,第1永磁体423的第1方向d1上的端为上表面423a。第1永磁体423的第2方向d2上的端为下表面423b。
[0057]
在此,第1永磁体423的沿着轴线方向从第1方向d1上的端到第2方向d2上的端的距离为第3距离c。第1单元425的沿着轴线方向从第1方向d1上的端到第2方向d2上的端的距离为第4距离d。第2单元413的沿着轴线方向从第1方向d1上的端到第2方向d2上的端的距离为第5距离e。第3距离c小于第4距离d。第4距离d与第3距离c之间的差g为1张钢板的厚度的量。第3距离c小于第5距离e。第5距离e与第3距离c之间的差g为1张钢板的厚度的量。
[0058]
构成第2单元413的1张钢板的厚度与构成第1单元425的1张钢板的厚度相同,并且,构成第2单元413的钢板的张数与构成第1单元425的钢板的张数相同。因此,第4距离d与第5距离e相同。
[0059]
另外,如图4所示,构成第2单元414的1张钢板的厚度与构成第1单元426的1张钢板的厚度相同,并且,构成第2单元414的钢板的张数与构成第1单元426的钢板的张数相同。因此,第2单元414和第1单元426具有相同的轴线方向上的高度。根据以上,定子铁心41的层叠钢板与转子铁心422的层叠钢板是层叠相同张数的具有相同厚度的钢板而成的。
[0060]
如以上说明的那样,实施方式的dd马达1包括:定子40,其具有定子铁心41;以及转子42,其具有配置于定子铁心41的径向的内侧的转子铁心422和固定于转子铁心422的永磁体421(权利要求的磁体)。
[0061]
永磁体421的沿着轴线方向从第1方向d1上的端到第2方向d2上的端的第1距离a小于定子铁心41的沿着轴线方向从第1方向d1上的端到第2方向d2上的端的第2距离b。另外,从永磁体421的第1方向d1上的端朝向第2方向d2离开第1距离a的一半距离a/2的第1位置与从定子铁心41的第1方向d1上的端朝向第2方向d2离开第2距离b的一半距离b/2的第2位置在轴线方向上一致。
[0062]
因而,在由于对dd马达1的各构成部件进行装配时产生的轴线方向上的尺寸的偏差而导致永磁体421与定子铁心41的轴线方向位置偏移的情况下,也能够使永磁体421所产生的磁通(磁场)更多地向定子铁心41传输而减少磁通泄漏。因此,能够得到更大的输出,进而,即使是更小的永磁体421也能够使转子42旋转。
[0063]
另外,第1位置与第2位置在轴线方向上一致,因此,无论是永磁体421相对于定子铁心41向轴线方向的上方偏移还是永磁体421相对于定子铁心41向轴线方向的下方偏移,都能使从永磁体421向定子铁心41传输的磁通(磁场)量变得均匀。
[0064]
定子铁心41和转子铁心422具有由多个钢板在轴线方向上层叠而成的层叠钢板。在通过车床加工对金属材料进行切削加工来制作定子铁心或者转子铁心的情况下,使外周
面形成为复杂的形状是困难的。但是,对于层叠了冲裁加工后的钢板而成的层叠钢板的情况,使外周面形成为复杂的形状是容易的。
[0065]
定子铁心41的层叠钢板和转子铁心422的层叠钢板是层叠相同张数的具有相同厚度的钢板而成的。由此,在使用卷材的钢板来制造定子铁心41和转子铁心422的层叠钢板的情况下,能够由相同的卷材来制造定子铁心用的层叠钢板的钢板和转子铁心用的层叠钢板的钢板。
[0066]
在每个第1单元425各固定有1个第1永磁体423(权利要求的磁体)。第3距离c小于第4距离d。
[0067]
由此,能够在第1单元425的轴线方向上的长度大于第1永磁体423的轴线方向上的长度的状态下构成轴线方向上的长度不同的转子铁心422的多个变化。
[0068]
通过将第4距离d与第3距离c之间的差g设为1张钢板的厚度的量,从而能够将构成转子铁心422的钢板材料抑制为最小限度地使第1单元425长于第1永磁体423。另外,通过将第4距离d与第3距离c之间的差g设为1张钢板的厚度的量,从而能够利用最少张数的钢板在定子铁心41的轴线方向上的长度大于第1永磁体423的轴线方向上的长度的状态下构成轴线方向上的长度不同的转子铁心422的多个变化。
[0069]
第3距离c小于第5距离e。由此,能够在第2单元413的轴线方向上的长度大于第1永磁体423的轴线方向上的长度的状态下构成轴线方向上的长度不同的定子铁心41的多个变化。
[0070]
通过将第5距离e与第3距离c之间的差g设为1张钢板的厚度的量,从而能够将构成定子铁心41的钢板材料抑制为最小限度地使第1单元425长于第1永磁体423。另外,通过将第5距离e与第3距离c之间的差g设为1张钢板的厚度的量,从而能够利用最少张数的钢板在第2单元413的轴线方向上的长度大于第1永磁体423的轴线方向上的长度的状态下构成轴线方向上的长度不同的定子铁心41的多个变化。
[0071]
[变形例]
[0072]
接着,对变形例进行说明。对于与实施方式相同结构的部位标注相同的符号并省略说明。图6是概略性地表示变形例的马达部的整体结构的立体图。
[0073]
如图6所示,在变形例中,在包含定子铁心41a(stator铁心)的定子40a(stator)的外周侧配置有包含永磁体421a(权利要求的磁体)和转子铁心422a(rotor铁心)的转子42a(rotor)。变形例具有所谓的外转子型的构造。
[0074]
定子铁心41a具有背轭411a和齿412a。背轭411a和齿412a为一体。背轭411a为从中心轴线ax的轴线方向观察时以中心轴线ax为中心的圆环状构件。齿412a从背轭411a的外周面向外周侧(径向外侧)突出。线圈隔着未图示的绝缘体缠绕于齿412a。
[0075]
在背轭411a设有沿着轴线方向延伸的贯通孔411aa。贯通孔411aa在中心轴线ax的轴线方向上延伸。在此,定子铁心41a包含层叠钢板。层叠钢板是将通过冲裁加工成形的具有背轭411a、齿412a和贯通孔411aa的1张钢板在轴线方向重叠多个而构成的。
[0076]
贯通孔411aa例如用于铆接加工。即,例如,通过使预定张数的多个钢板层叠,将铆钉插入于贯通孔411aa,之后将铆钉在轴线方向上压溃,从而制作第2单元413a、414a。通过使多个第2单元413a、414a在轴线方向层叠,从而制作定子铁心41a。
[0077]
在第2单元414a的轴线方向的一侧(图6中的上侧)堆叠第2单元413a。在变形例中,
第2单元413a和第2单元414a由相同厚度且分别层叠了相同张数的钢板的层叠钢板构成。另外,在图6中,为了容易地目视确认第2单元413a和第2单元414a的分界s3,方便起见地以粗线示出,但实际上是相同厚度的钢板沿着轴线方向无间隙地层叠。
[0078]
另外,也可以是,不经过第2单元413a、414a而使全部张数的钢板例如利用铆钉铆接(日文:
かしめ
)来对它们进行固定,从而制作定子铁心41a。对于构成定子铁心41a的钢板的材质,没有特别的限定,能够应用各种材质的钢板,例如优选硅钢板。
[0079]
转子42a包含转子铁心422a和永磁体421a(权利要求的磁体)。转子铁心422a也由将通过冲裁加工成形为期望形状的1张钢板在轴线方向上重叠多个而成的层叠钢板构成。在转子铁心422a设有沿着轴线方向延伸的贯通孔422ab。
[0080]
贯通孔422ab例如用于铆接加工。即,例如,使预定张数的多个钢板层叠,将铆钉插入于贯通孔422ab,之后将铆钉在轴线方向上压溃,从而制作第1单元425a、426a。通过在第1单元426a的轴线方向的一侧(图6中的上侧)堆叠第1单元425a来构成转子铁心422a。在变形例中,第1单元425a和第1单元426a由相同厚度且张数分别相同的钢板构成。
[0081]
另外,在图6中,为了容易地目视确认第1单元425a和第1单元426a的分界s4,方便起见地以粗线示出,但实际上是相同厚度的钢板沿着轴线方向无间隙地层叠。另外,也可以是,不经过第1单元425a、426a而使全部张数的钢板例如利用铆钉进行铆接(日文:
かしめ
)来对它们进行固定,从而制作转子铁心422a。对于构成转子铁心422a的钢板的材质,没有特别的限定,能够应用各种材质的钢板,例如优选硅钢板。
[0082]
另外,构成转子铁心422a的1张钢板的厚度与构成定子铁心41a的1张钢板的厚度相同。通过使构成转子铁心422a的层叠钢板的钢板的张数与构成定子铁心41a的层叠钢板的钢板的张数相同,从而能够简单地使转子铁心422a的层叠钢板的轴线方向上的高度与定子铁心41a的层叠钢板的轴线方向上的高度一致。
[0083]
如以上说明的那样,变形例的dd马达具有所谓的外转子型的构造。具体而言,在定子40a的外周侧配置有转子42a。变形例的dd马达的基本构造与实施方式的dd马达1相同,因此能够在实施方式中得到的作用效果在变形例中也能够得到。例如,在由于对dd马达的各构成部件进行装配时产生的轴线方向上的尺寸的偏差而导致永磁体421a(权利要求的磁体)与定子铁心41a的轴线方向位置偏移的情况下,也能够使永磁体421a所产生的磁通(磁场)更多地向定子铁心41a传输而减少磁通泄漏。因此,能够得到更大的输出,进而,即使是更小的永磁体421a也能够使转子42a旋转。
[0084]
附图标记说明
[0085]
1、dd马达(直接驱动马达);40、40a、定子;41、41a、定子铁心;42、42a、转子;413、413a、414、414a、第2单元;421、421a、永磁体(磁体);422、422a、转子铁心;423、第1永磁体(磁体);424、第2永磁体(磁体);425、425a、426、426a、第1单元;a、第1距离;b、第2距离;c、第3距离;d、第4距离;e、第5距离。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。