1.本发明涉及轨道交通减震设备技术领域,尤其是涉及一种用于轨道车辆的变阻尼动力吸振器。
背景技术:
2.自第一条高速铁路的建成至今,经过不断的技术革新,高速铁路已逐渐作为新型经济产业与国民经济建设的发展息息相关。
3.然而随着高速铁路建设的蓬勃发展,高速动车组在安全性及舒适性方面的要求也越来越严格。随着车辆时速的提高,其动态环境随之不断恶化,如轨道激励的加剧导致结构的异常振动、轮轨相互作用的复杂程度不断提高以及蛇行运动的加剧等等。高速动车组设计制造中振动噪声问题也日渐突出,由于被动控制的控制频带较窄的局限性,半主动控制和主动控制逐渐开始受到大家的关注,而主动控制又需消耗较多能量,因此急需解决轨道车辆的横向振动问题。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种用于轨道车辆的变阻尼动力吸振器。
5.本发明的目的可以通过以下技术方案来实现:
6.一种用于轨道车辆的变阻尼动力吸振器,横向设置在车体底架上,该变阻尼动力吸振器包括承载结构和吸振结构,所述的承载结构包括左右两条承重杆以及两端固定在两条承重杆下部的承重轴,所述的吸振结构包括在承重轴上横向滑动的惯性质量块以及分别设置在惯性质量块两侧面与对应两条承重杆之间的阻尼装置和传感器。
7.所述的阻尼装置包括为惯性质量块运动提供阻尼和刚度的吸振弹簧和磁流变阻尼器单元。
8.所述的吸振弹簧的内端与开设在惯性质量块侧面上的圆形凹槽固定定位,外端套设在承重轴下部内侧面的弹簧固定杆上定位。
9.所述的磁流变阻尼器单元一端通过磁流变阻尼器单元连接螺纹孔固定在承重轴下部,另一端与惯性质量块侧面固定。
10.所述的传感器为加速度传感器,用以实时采集惯性质量块相对承重杆的振动加速度。
11.所述的两条承重杆上部通过吊孔与车体底架固定。
12.该变阻尼动力吸振器还包括与加速度传感器连接的pid控制器,所述的pid 控制器通过加速度传感器采集的振动加速度控制输入磁流变阻尼器单元的电流进而调节阻尼。
13.该变阻尼动力吸振器的具体装配步骤包括:
14.1)将惯性质量块采用间隙配合的方式套设在承重轴上,使惯性质量块可在承重轴上自由横向移动;
15.2)将吸振弹簧一端放入惯性质量块的圆形凹槽中,另一端套设在承重轴的弹簧固定杆上定位;
16.3)将磁流变阻尼器单元与惯性质量块通过螺栓连接固定;
17.4)将左右两条承重杆与中间的吸振结构通过螺栓连接固定;
18.5)将加速度传感器连接在惯性质量块和承重杆之间,并与pid控制器连接;
19.6)承重杆通过吊孔与车体底架连接,并为磁流变阻尼器单元接电完成装配。
20.该变阻尼动力吸振器的运动方程表达式为:
[0021][0022]
其中,m、mc、mb分别为惯性质量块、车体和构架的质量,k、k
p
、ks分别为吸振弹簧、二系悬挂、一系悬挂的等效刚度,c、cs、c
p
分别为磁流变阻尼器单元、二系悬挂、一系悬挂的等效阻尼,z、zc、zb、zr分别为惯性质量块、车体和构架的位移以及轨道不平顺激励,f为磁流变阻尼器单元的输出力。
[0023]
该变阻尼动力吸振器的采用半主动控制方式,具体为:
[0024]
当轨道激励作用到车辆车体上时,加速度传感器检测惯性质量块相对承重杆的实时加速度数据,磁流变阻尼器单元经过滤波和a/d转换,通过死区函数将实时加速度数据与设定的加速度阈值进行比较,判断是否达到偏差标准,若是,则采用 pid控制实现磁流变阻尼器单元输入电流的控制,进而改变磁流变阻尼器单元的内部阻尼,最终改变磁流变阻尼器单元输出的阻尼力,若否,则不进行处理,以此时的动力吸振器阻尼实现轨道车辆横向振动的半主动控制。
[0025]
与现有技术相比,本发明具有以下优点:
[0026]
一、本发明整体安装于车体底架上,装配方式简单,安全性能可靠,可长时间高效可靠地工作。
[0027]
二、本发明采用磁流变阻尼器单元来实现阻尼的调节,结构简单,控制方法容易。
[0028]
三、本发明结构制造工艺简单,生产成本低。
[0029]
四、本发明根据采集的加速度信号,通过控制系统改变磁流变阻尼器单元的输入电流,进而改变磁流变阻尼器单元的内部阻尼,实现半主动控制,相比于被动控制,其控制振动频带更宽,相比于主动控制,其耗能更低。
附图说明
[0030]
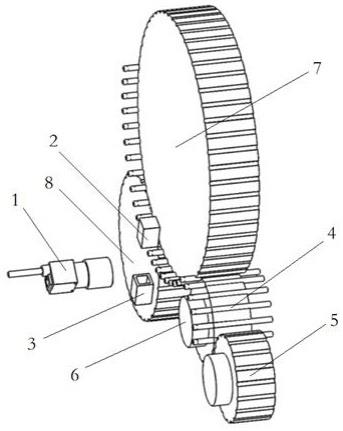
图1为本发明的整体结构示意图。
[0031]
图2为本发明的振动系统简图。
[0032]
图3为本发明的半主动控制系统闭环简图。
[0033]
图中标记说明:
[0034]
1、吊孔,2、承重杆,3、磁流变阻尼器单元连接螺纹孔,4、承重轴连接螺纹孔,5、弹簧固定杆,6、吸振弹簧,7、惯性质量块,8、承重轴,9、加速度传感器,10、磁流变阻尼器单元。
具体实施方式
[0035]
下面结合附图和具体实施例对本发明进行详细说明。
[0036]
实施例
[0037]
如图1所示,本发明提供一种用于轨道车辆的变阻尼动力吸振器,该变阻尼动力吸振器主要包括承载结构和吸振结构,承载结构包括两条承重杆2以及两端与承重杆2下部固定的承重轴8,吸振结构包括吸振弹簧6、惯性质量块7、加速度传感器9、磁流变阻尼器单元10,承重杆2上部通过吊孔1与车体底架连接,吸振弹簧6通过惯性质量块7上的圆形凹槽和承重杆2上的弹簧固定杆5定位,磁流变阻尼器单元10一端通过螺栓连接承重杆2,另一端与惯性质量块7固定;惯性质量块7中部开设通孔可在承重轴8上横向滑动,承重轴8两端与承重杆2固定连接,加速度传感器9连接在惯性质量块7和承重杆2之间。
[0038]
该变阻尼动力吸振器的具体装配步骤如下:
[0039]
a、装配吸振结构,惯性质量块7与承重轴8之间采用间隙配合,使惯性质量块7可在承重轴8上自由横向移动;
[0040]
b、将吸振弹簧6一端放入惯性质量块7的圆形凹槽中,另一端套设在承重轴 8的弹簧固定杆5上定位;
[0041]
c、将磁流变阻尼器单元10与惯性质量块7通过螺栓连接固定;
[0042]
d、将左右两条承重杆2与中间的吸振结构通过螺栓连接固定;
[0043]
e、将加速度传感器9连接在惯性质量块7和承重杆2之间;
[0044]
f、吸振器通过吊孔1与车体底架连接,磁流变阻尼器单元10接电。
[0045]
如图2所示,下面介绍本发明装置的运动方程简图,则运动方程的表达式为:
[0046][0047]
式中,m、mc、mb分别为惯性质量块、车体和构架的质量,k、k
p
、ks分别为吸振弹簧、二系悬挂、一系悬挂的等效刚度,c、cs、c
p
分别为磁流变阻尼器单元、二系悬挂、一系悬挂的等效阻尼,z、zc、zb、zr分别为惯性质量块、车体和构架的位移以及轨道不平顺激励,f为磁流变阻尼器单元的输出力。
[0048]
下面介绍本发明的工作原理
[0049]
本发明的变阻尼动力吸振器采用半主动控制方法,如图3所示,当轨道激励作用到车辆车体上时,加速度传感器检测惯性质量块相对承重杆的实时加速度数据,磁流变阻尼器单元经过滤波和a/d转换,通过死区函数将实时加速度与设定的加速度阈值进行比较,判断是否达到偏差标准,若达到了偏差标准,通过pid控制方法来实现磁流变阻尼器单元输入电流的改变,以改变磁流变阻尼器单元内部阻尼,最终改变磁流变阻尼器单元输出的阻尼力,反之,如果偏差过小,则不进行处理,以此动力吸振器实现轨道车辆横向振动的半主动控制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。