1.本发明涉及树篱修剪机。
背景技术:
2.作为用于树篱或花木的剪枝、整形修剪的树篱修剪机(剪枝机),有使用内转子型的电动马达使刀片往复运动的树篱修剪机(例如,参照专利文献1)。内转子型的电动马达具备:具有绕组的定子;和插通于定子且设置有磁铁的内转子,内转子可自由旋转地被定子支撑。[现有技术文献][专利文献]
[0003]
专利文献1:美国专利第9220201号说明书
技术实现要素:
[发明要解决的技术问题]
[0004]
在用树篱修剪机进行修剪作业过程中,如果作业人员没有预料到而使刀片与比其他树枝粗的树枝接触,则有时电动马达的输出不足,而刀片停止。现有的树篱修剪机中,为了使刀片不易停止,使用输出大的电动马达即可,但是,电动马达变得大而重,功耗也增加。作为另一方法,有增大电动马达与刀片之间的齿轮比的方法,但是,由于刀片的驱动速度降低,因此,剪树枝的锋利状况也降低,同时,齿轮变大,驱动机构变得大而重。这样,若想要利用现有的具有内转子型的电动马达的树篱修剪机对较粗的树枝进行整形修剪,则装置整体变得大而重。
[0005]
本发明的课题在于,提供一种能够防止在对较粗的树枝进行整形修剪时对电动马达的负载较大的情况下刀片的驱动停止之类的问题的树篱修剪机。[用于解决技术问题的技术方案]
[0006]
为了解决上述课题,本发明的树篱修剪机具备:电动马达;刀片,其配置于所述电动马达的前方;以及主体壳体,其收纳所述电动马达。所述电动马达具备:具有绕组的定子;和外转子,其形成有将所述定子的外周包围的周壁部,且在所述周壁部设置有磁铁。所述外转子可自由旋转地被所述定子支撑,并且经由驱动传动机构与所述刀片连结。所述外转子旋转,从而使所述刀片进行往复运动。[发明效果]
[0007]
本发明的树篱修剪机中,通过采用即使与内转子型的电动马达相同的旋转速度也能够蓄积大的旋转动能的外转子型的电动马达,从而即使在对较粗的树枝进行整形修剪时电动马达过载而瞬间地电动马达的旋转速度降低的情况下,通过利用外转子所蓄积的旋转动能产生大的转矩,从而能够对较粗的树枝进行整形修剪。
附图说明
[0008]
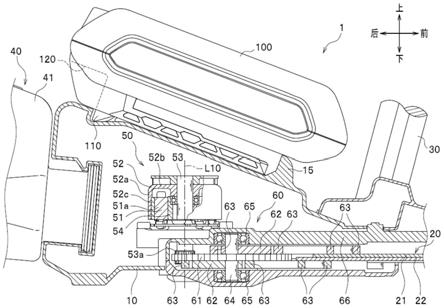
图1是表示本发明的实施方式的一例涉及的树篱修剪机的立体图。图2是表示本发明的实施方式的一例涉及的树篱修剪机的侧视图。图3是表示本发明的实施方式的一例涉及的树篱修剪机的侧剖视图。
具体实施方式
[0009]
适当地参照附图对本发明的实施方式的一例详细地进行说明。在以下的说明中,上下前后左右方向是为了便于对本实施方式的树篱修剪机进行说明而设定的,不用来限定树篱修剪机的结构或使用状态。
[0010]
如图1所示,本实施方式的树篱修剪机1是用于树篱或花木的剪枝或整形修剪的手持式的小型切割机,安装电池100以电动方式驱动。如图2所示,树篱修剪机1具备:电动马达50;刀片20,其配置于电动马达50的前方;和主体壳体10,其收纳电动马达50。
[0011]
主体壳体10是树脂制的箱体,其上表面相对于下表面而倾斜。主体壳体10的上表面以随着从后侧趋向前侧而下降的方式倾斜。也就是说主体壳体10形成为前部比后部低。而且,主体壳体10形成为侧视大致为三角形。
[0012]
在主体壳体10的上表面设置有用于安装电池100的电池安装部15。电池安装部15配合主体壳体10的上表面以随着从后部趋向前部而下降的方式倾斜。所谓配合是指例如为相同倾斜角,或者为实质上相同倾斜角。
[0013]
电池100是公知的电池,在沿前后方向延伸的长方体的壳体中收纳了锂离子蓄电池等二次电池。如图3所示,在电池100的下表面的后端部,突出形成有与电池安装部15卡合的卡合部110。
[0014]
当要在电池安装部15安装电池100时,一边使电池100相对于电池安装部15从后侧向前方滑动,一边使电池100的下部与电池安装部15嵌合。而且,若电池100的前端部移动到被电池安装部15的前端部支撑的位置,则电池100的卡合部110与电池安装部15卡合,从而电池100被固定于电池安装部15。
[0015]
安装于电池安装部15的电池100以随着从后侧趋向前侧而下降的方式倾斜,配置为前部比后部低。
[0016]
在电池安装部15的上表面设置有金属制的连接端子(未图示)。连接端子与控制基板(未图示)和电动马达50电连接。而且,通过将电池100的连接端子与电池安装部15的连接端子连接,从而,从电池100向控制基板和电动马达50供给电力。
[0017]
当要从电池安装部15取下电池100时,若提起设置于电池100的后端部的连结用杆120,则电池安装部15与卡合部110之间的卡合状态被解除,能够使电池100相对于电池安装部15向后方滑动。
[0018]
如图1所示,在主体壳体10的前方设置有前把手30。前把手30配置于安装于电池安装部15的电池100的前方。前把手30形成有从沿左右方向延伸的横部的左右的端部向下方延伸的左右的纵部,两纵部的下端部固定于主体壳体10的前端部。
[0019]
在主体壳体10的后方设置有后把手40。在后把手40形成有:与主体壳体10的后部连结的连结部41;和形成有沿左右方向贯通的开口部的把持部42。在作业人员要拿起树篱修剪机1时,将手插入把持部42的开口部来把持后把手40。如图3所示,后把手40的连结部41以可绕前后方向的轴自由转动的方式与主体壳体10的后表面连结。由此,相对于主体壳体10,后把手40整体可绕前后方向的轴自由转动。
[0020]
如图1所示,在后把手40的把持部42的内周部设置有作为用于在作业人员已把持的状态下驱动刀片20的操作构件的触发杆43。另外,在把持部42的上表面,设置有解除触发杆43的锁定的锁定解除杆44,并且设置有电源开关45。
[0021]
如图2所示,刀片20相对于电动马达50向前方以直线状延伸,从主体壳体10的前端部向前方突出。刀片20是公知的切割用具,且具备:金属制的上刀片21和下刀片22;和树脂制的罩23。
[0022]
上刀片21与下刀片22上下重叠。如图1所示,在上刀片21和下刀片22形成有向左右方向突出的多个切割刀片24。罩23是为了防止作业人员的手与刀片20的接触的保护用的部件,将上刀片21的上表面覆盖。
[0023]
如图3所示,上刀片21和下刀片22的后端部插入到主体壳体10内。上刀片21和下刀片22的后端部经由驱动传动机构60与电动马达50连结。
[0024]
驱动传动机构60具备:刀片驱动用齿轮61;设置于刀片驱动用齿轮61的上下的凸轮62、62;和上下的可动板63、63。刀片驱动用齿轮61是圆盘状的齿轮,支撑轴64从中心部向上下方向突出。支撑轴64的上端部和下端部可自由旋转地被设置于主体壳体10内的上下的轴承65、65支撑。也就是,刀片驱动用齿轮61绕支撑轴64的轴旋转。
[0025]
在刀片驱动用齿轮61的上表面和下表面,上下的凸轮62、62分别突出形成。凸轮62设置于相对于刀片驱动用齿轮61的旋转中心偏心的位置。
[0026]
上侧的凸轮62插入到上侧的可动板63的后端部的开口部,上侧的可动板63的前端部与上刀片21的后端部连结。下侧的凸轮62插入到下侧的可动板63的后端部的开口部,下侧的可动板63的前端部与下刀片22的后端部连结。
[0027]
驱动传动机构60构成为,伴随刀片驱动用齿轮61的旋转,上下的凸轮62、62进行旋转移动,从而上下的可动板63、63沿前后方向进行往复运动,上刀片21和下刀片22相反地沿前后方向进行往复运动。
[0028]
电动马达50具备:定子51、外转子52、输出轴53、和基座部件54。在定子51中设置有多个绕组51a。基座部件54的下端部固定于驱动传动机构60的壳体66。
[0029]
输出轴53插通在基座部件54的内周面所设置的轴承。由此,输出轴53可自由旋转地被基座部件54支撑。输出轴53插通在包括基座部件54的定子51的内周面所设置的轴承。由此,输出轴53可自由旋转地被定子51支撑。在输出轴53的下端部设置有输出齿轮53a。输出齿轮53a与驱动传动机构60的刀片驱动用齿轮61啮合。
[0030]
在外转子52形成有:将定子51和各绕组51a的外周包围的圆筒状的周壁部52a;和将周壁部52a的上表面开口部堵塞的顶部52b。本实施方式的外转子52是铁制的,但是,不限定本发明的外转子的材质。在周壁部52a的内周面安装有多个磁铁52c。
[0031]
输出轴53的上端部与外转子52的顶部52b的中心部连结。由此,外转子52可自由旋转地被定子51支撑,输出轴53与外转子52联动地进行旋转。外转子52和输出轴53的旋转轴线l10沿与刀片20的延伸方向(前后方向)正交的上下方向延伸。
[0032]
外转子52形成为直径(横向)比旋转轴线l10方向(上下方向)的长度大。也就是说外转子52形成为从横向(与旋转轴线l10正交的方向)观察时,成为宽度比高度大的扁平形状。
[0033]
外转子52可自由旋转地被定子51支撑,并且经由驱动传动机构60与刀片20的后端部连结。而且,若从电池100向定子51的各绕组51a通电,则外转子52和输出轴53进行旋转,其驱动力经由驱动传动机构60传递到刀片20,从而,上刀片21和下刀片22沿前后方向进行往复运动。
[0034]
如图2所示,本实施方式的树篱修剪机1中,在外转子52的旋转轴线l10方向的下侧安装有刀片20。而且,电动马达50在前把手30的前端l20与后把手40的把持部42的前端l30之间,配置于比刀片20的向前后方向的虚拟延长区域的上端l40靠主体壳体10的内侧的区域。
[0035]
另外,如图3所示,本实施方式的树篱修剪机1中,在外转子52的成为旋转轴线l10方向的上侧的部位形成有电池安装部15,并且,在成为旋转轴线l10方向的下侧的部位安装有刀片20。而且,在成为电池安装部15与刀片20的向前后方向的虚拟延长区域的上端l40之间的区域收纳有外转子52。
[0036]
如图2所示,如以上那样的本实施方式的树篱修剪机1构成为,具备:电动马达50;刀片20,其配置于电动马达50的前方;以及主体壳体10,其收纳电动马达50。如图3所示,电动马达50具备:具有绕组51a的定子51;和外转子52,其形成有将定子51的外周包围的周壁部52a,且在周壁部52a设置有磁铁52c。外转子52可自由旋转地被定子51支撑,并且,经由驱动传动机构60与刀片20连结。外转子52旋转,从而刀片20进行往复运动。
[0037]
本实施方式的树篱修剪机1中,即使超负载作用于刀片20而瞬间地电动马达50的旋转速度降低,由于外转子52所蓄积的旋转动能,使得在输出轴53产生较大的转矩,因此,能够对较粗的树脂进行整形修剪。通过这样构成,本实施方式的树篱修剪机1变得小型和轻重量。
[0038]
手持式的树篱修剪机1中,由于重量、大小的关系,导致电动马达50的输出变小,但是,通过附加外转子52的惯性力,从而能够提高刀片20的切割能力。这样,适用于小型且轻重量的手持式的作业机。在将刀片20的角度(朝向)各种各样地改变来进行作业时,特别地适用。
[0039]
本实施方式的树篱修剪机1中,在刀片20形成有沿前后方向延伸的部位。而且,外转子52的旋转轴线l10沿与前后方向正交的方向延伸。另外,外转子52形成为相对于旋转轴线l10方向的长度的、与旋转轴线方向正交的方向的长度(本实施方式中,外转子52的直径)的比率为1以上。
这样,通过将外转子52形成为侧视时为扁平形状,从而,能够使用于设置电动马达50的空间在上下方向缩小,因此能够使树篱修剪机1小型化。另外,通过使主体壳体10在上下方向缩小来较低地配置电池100,从而能够提高树篱修剪机1的稳定性。另外,这样,通过将外转子52形成为扁平形状,从而通过外转子52能够蓄积较大的旋转动能。
[0040]
如图2所示,本实施方式的树篱修剪机1中,在主体壳体10的前方设置有前把手30,并且,在主体壳体10的后方设置有后把手40。另外,在主体壳体10的前方,且是外转子52的旋转轴线l10方向的下侧安装有刀片20。而且,电动马达50在前把手30的前端l20与后把手40的把持部42的前端l30之间,配置于比刀片20的向前后方向的虚拟延长区域的上端l40靠主体壳体10的内侧的区域。
[0041]
该结构中,有效地利用前把手30与后把手40之间的空间来配置电动马达50。由此,能够使主体壳体10小型化。另外,由于在前把手30与后把手40之间配置有重量大的电动马达50,因此,树篱修剪机1的重量平衡良好。从而,作业人员容易把持前把手30和后把手40来操作树篱修剪机1,因此能够提高作业效率和作业精度。特别地,在利用树篱修剪机1进行树木的整形修剪的收尾作业时,对于作业人员来说,树篱修剪机1的重量平衡成为作业性的重要因素。另外,将外转子52形成为侧视为扁平形状时,树篱修剪机1的重量平衡进一步变得良好,另外,对于作业人员来说,用于把持前把手30的空间变大,因此,作业性进一步提高。
[0042]
本实施方式的树篱修剪机1中,在外转子52的旋转轴线l10的下侧安装有刀片20。而且,在主体壳体10中,成为外转子52的旋转轴线l10的上侧的上表面随着从后部趋向前部而向外转子52的旋转轴线l10方向的下侧倾斜。由此,主体壳体10形成为侧视为大致三角形。
[0043]
该结构中,能够在主体壳体10内确保能够收纳电动马达50的空间的同时,使主体壳体10小型化。另外,对于作业人员来说,用于把持前把手30的空间变大,作业性进一步提高。另外,将外转子52形成为侧视为扁平形状时,用于把持前把手30的空间变大,因此,作业性进一步提高。
[0044]
如图2所示,本实施方式的树篱修剪机1中,在成为外转子52的旋转轴线l10方向的上侧的部位形成有电池安装部15。这样,通过有效地利用电池安装部15与刀片20的安装位置之间的空间来配置电动马达50,从而能够使主体壳体10小型化。另外,当在主体壳体10安装了电池100时,能够充分地确保用于把持前把手30的空间,并且,使电池100相对于电池安装部15从后侧向前侧滑动,或从前侧向后侧滑动,能够容易地拆装。另外,通过使主体壳体10在上下方向缩小,来较低地配置电池100,从而能够提高树篱修剪机1的稳定性。
[0045]
本实施方式的外转子52是铁制的,与相同大小的铝合金制或镁合金制的外转子相比,质量大,因此,外转子52所蓄积的旋转动能变大。因此,在想要对较粗的树枝进行整形修剪而使电动马达50超负载,瞬间地电动马达50的旋转速度降低时,在电动马达50产生较大的转矩而能够对较粗的树枝进行整形修剪。
另外,通过在铁制的外转子52设置铁制的输出轴53,从而,能够可靠地传递根据旋转动能产生的较大的转矩。另外,在如本实施方式那样外转子52是铁制的情况下,铁是蓄积旋转动能的比重较大的磁性体,因此,不需要在周壁部52a设置用于形成磁铁52c的磁路的铁制的环。
[0046]
本实施方式的树篱修剪机1中,刀片20的后端部与外转子52连结。刀片20相对于电动马达50向前方延伸,沿前后方向进行往复运动。这样,能够使具有直线状的刀片20的树篱修剪机1小型化,并且提高刀片20的切割能力。特别地,在利用树篱修剪机1进行树木的整形修剪的收尾作业时,对于作业人员来说,树篱修剪机1的重量平衡成为作业性的重要因素。
[0047]
以上,对本发明的实施方式的一例进行了说明,但是,本发明不限定于上述实施方式,能够在不脱离其主旨的范围内适当地进行变更。如图3所示,本实施方式的电动马达50中,连结于外转子52的输出轴53经由驱动传动机构60与刀片20连结,但是,不限定将外转子52的驱动力向刀片20传递的机构。
[0048]
本实施方式的树篱修剪机1中,在比外转子52靠上侧形成有电池安装部15,在下侧安装有刀片20,但是,不限定电池安装部15和刀片20的配置。
[0049]
如图1所示,本实施方式的树篱修剪机1的刀片20构成为向前方以直线状延伸,上刀片21和下刀片22沿前后方向进行往复运动,但是,不限定刀片的结构。例如,作为刀片的一例,也可以使用构成为在从电动马达50向前方延伸的直线部的前端部,设置沿左右方向延伸的刀片,使刀片沿左右方向进行往复运动的t字形状的刀片。
[0050]
如图2所示,本实施方式的树篱修剪机1中,主体壳体10的上表面和电池安装部15随着从后部趋向前部而向下方倾斜,但是,也可以不使主体壳体10的上表面和电池安装部15倾斜。
[0051]
本实施方式的树篱修剪机1中,外转子52是铁制的且是圆形,但是,不限定外转子52的材质和形状。
[0052]
本实施方式的树篱修剪机1中,从电池100向控制基板和电动马达50供给电力,但是,也可以不使用电池100,而利用电源线从外部电源向控制基板和电动马达50供给电力。[附图标记说明]
[0053]
1树篱修剪机10主体壳体15电池安装部20刀片21上刀片22下刀片23罩24切割刀片30前把手40后把手41连结部42把持部50电动马达
51
ꢀꢀ
定子51a 绕组52
ꢀꢀ
外转子52a 周壁部52b 顶部52c 磁铁53
ꢀꢀ
输出轴53a 输出齿轮54
ꢀꢀ
基座部件60
ꢀꢀ
驱动传动机构61
ꢀꢀ
刀片驱动用齿轮62
ꢀꢀ
凸轮63
ꢀꢀ
可动板64
ꢀꢀ
支撑轴65
ꢀꢀ
轴承100 电池110 卡合部120 连结用杆l10 旋转轴线
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。