1.本实用新型涉及手机背光模组识别技术领域,具体涉及一种可正反识别手机背光模组的识别机构。
背景技术:
2.在手机背光和玻璃视觉对位贴合的过程中,手机背光模组和玻璃盖板在平台夹具上自动完成组装,其中,组装顺序为:(1)将手机背光模组放置在治具上,并将其运动到拍照位置;(2)4个相机各定位一个直角;(3)玻璃盖板自动撕膜,并使其运动到拍照位置;(4)2个相机各定位一个直角;(5)手机背光模组和玻璃盖板分别进行位置补正;(6)将手机背光模组和玻璃盖板进行压合,然后,自动取出成品取件放置到传送带上。
3.现有的自动组装机,在对背光模组拍照的时候,大多只选择正面或反面进行单边拍照,如需两面一起拍照定位手机背光模组的特征区域,就要增加了一套视觉模组和一套运动模组,使得设备尺寸变大,结构和软件也会变得相对复杂,直接导致成本变高。
技术实现要素:
4.针对现有技术中的缺陷,本实用新型提供的一种可正反识别手机背光模组的识别机构,既节省了一套视觉模组和一套运动模组,又能使设备空间尺寸不变,软件的操作界面简单。
5.为了解决上述技术问题,本实用新型提出以下技术方案:
6.一种可正反识别手机背光模组的识别机构,包括工作台和固定在工作台上的支撑板,所述工作台上设置有治具,治具上的四个直角处嵌设于三角形棱镜,所述治具的正上方设有两组摄像组件、用于分别驱动两组摄像组件升降的两个升降组件以及用于驱动两个升降组件水平移动的水平驱动组件,水平驱动组件与支撑板固定连接,水平驱动组件均与两个升降组件驱动连接,两组摄像组件、两个升降组件和水平驱动组件分别与plc控制器电连接。
7.进一步地,每组所述摄像组件包括第一固定板和两个ccd摄像机,两个ccd摄像机均与第一固定板固定连接,升降组件与第一固定板驱动连接,两个ccd摄像机均与plc控制器电连接。
8.进一步地,所述水平驱动组件包括伺服电机和丝杆,伺服电机安装于支撑板上,伺服电机和丝杆驱动连接,第二固定板与丝杆的螺母座固定连接,升降组件与第二固定板固定连接,伺服电机与plc控制器电连接。
9.进一步地,所述治具的四个直角处开设有与三角形棱镜相适配的凹槽,三角形棱镜的上表面与治具的上表面平齐。
10.进一步地,所述三角形棱镜的切面为长方形,所述三角形棱镜的侧面为等腰直角三角形,所述三角形棱镜的腰面为正方形,且三角形棱镜的腰面上涂覆有黑膜。
11.由上述技术方案可知,本实用新型的有益效果:手机背光模组置于治具上,且在治
具的四个角落分别加了一个三角形棱镜,手机背光模组的四个直角分别位于四个三角形棱镜的区域,通过plc控制器对两组摄像组件的高度和平移位置的调整,且经过三角形棱镜的180度反射,即可拍到手机背光模组的正面和反面,既节省了一套视觉模组和一套运动模组,又能使设备空间尺寸不变,软件的操作界面简单。
附图说明
12.为了更清楚地说明本实用新型具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
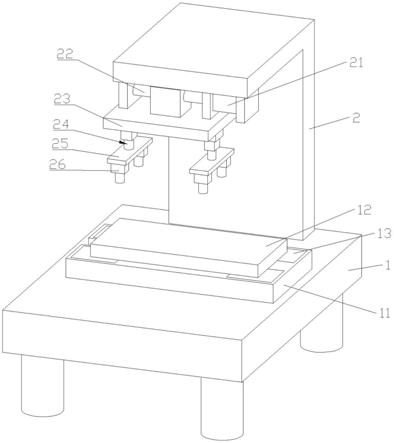
13.图1为本实用新型的结构示意图;
14.图2为本实用新型三棱镜的结构示意图;
15.图3为本实用新型的光路图。
16.附图标记:
17.1-工作台;2-支撑板;
18.11-治具;12-手机背光模组;13-三角形棱镜;21-伺服电机;22-丝杆;23-第二固定板;24-升降组件;25-第一固定板;26-ccd摄像机;
19.131-切面;132-腰面;133-侧面。
具体实施方式
20.下面将结合附图对本实用新型技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本实用新型的技术方案,因此只作为示例,而不能以此来限制本实用新型的保护范围。
21.参阅图1-图3所示,本实施例提供的一种可正反识别手机背光模组的识别机构,包括工作台1和固定在工作台1上的支撑板2,工作台1上设置有治具11,治具11上的四个直角处嵌设于三角形棱镜13,治具11的正上方设有两组摄像组件、用于分别驱动两组摄像组件升降的两个升降组件24以及用于驱动两个升降组件24水平移动的水平驱动组件,水平驱动组件与支撑板2固定连接,水平驱动组件均与两个升降组件24驱动连接,两组摄像组件、两个升降组件24和水平驱动组件分别与plc控制器电连接,升降组件24可选用电缸或电动伸缩杆。
22.在实际使用中,手机背光模组12置于治具11上,且在治具11的四个角落分别加了一个三角形棱镜13,手机背光模组12的四个直角分别位于四个三角形棱镜13的区域,通过plc控制器对两组摄像组件的高度和平移位置的调整,且经过三角形棱镜13的180度反射,即可拍到手机背光模组12的正面和反面,既节省了一套视觉模组和一套运动模组,又能使设备空间尺寸不变,软件的操作界面简单。
23.在本实施例中,每组摄像组件包括第一固定板25和两个ccd摄像机26,两个ccd摄像机26均与第一固定板25固定连接,升降组件24与第一固定板25驱动连接,两个ccd摄像机26均与plc控制器电连接。
24.在实际使用中,通过plc控制器控制水平驱动组件带动两组摄像组件水平移动,使
四个ccd摄像机26分别位于四个三棱镜的正上方,实现对手机背光模组12正面的拍摄;以治具11的中心位置为基准,通过plc控制器控制水平驱动组件带动两组摄像组件向治具11的右侧移动,同时,使左侧的两个ccd摄像机26位于左侧两个三角形棱镜13的右侧,且通过plc控制器控制左侧的升降组件24伸长,带动左侧的两个ccd摄像机26下降,便于接收三角形棱镜13两次全反射后的光信号,对手机背光模组12左侧两个直角的反面进行拍照。相反地,通过plc控制器控制水平驱动组件带动两组摄像组件向治具11的左侧移动,同时,使右侧的两个ccd摄像机26位于右侧两个三角形棱镜13的左侧,且通过plc控制器控制右侧的升降组件24伸长,带动右侧的两个ccd摄像机26下降,便于接收三角形棱镜13两次全反射后的光信号,对手机背光模组12右侧两个直角的反面进行拍照,实现手机背光模组12反面的拍摄;水平驱动组件水平移动的距离以及升降组件24伸长或缩短的距离根据三角形棱镜13的大小以及手机背光模组12的大小计算得到。
25.在本实施例中,水平驱动组件包括伺服电机21和丝杆22,伺服电机21安装于支撑板2上,伺服电机21和丝杆22驱动连接,第二固定板23与丝杆22的螺母座固定连接,升降组件24与第二固定板23固定连接,伺服电机21与plc控制器电连接。
26.在实际使用中,plc控制器控制伺服电机21的输出轴转动带动丝杆22的螺母座进行水平移动,实现控制第二固定板23的水平移动,从而实现带动ccd摄像机26的移动。
27.在本实施例中,治具11的四个直角处开设有与三角形棱镜13相适配的凹槽,三角形棱镜13的上表面与治具11的上表面平齐,使入射光线和反射光线保持相互平行且反向的效果。
28.在本实施例中,三角形棱镜13的切面131为长方形,三角形棱镜13的侧面133为等腰直角三角形,三角形棱镜13的腰面132为正方形,且三角形棱镜13的腰面132上涂覆有黑膜,提高腰面132的全反射效果。三棱镜对手机背光模组12左侧两个直角反射的光路图如图3所示,手机背光模组12左侧的直角图像a入射到三棱镜的左侧投影成图像a1,经过三角形棱镜13左侧的腰面132的一次反射,投影成图像a2,然后,经三角形棱镜13右侧的腰面132的二次反射,投影成图像a3,最后,入射到ccd摄像机26的ccd芯片中。
29.最后应说明的是:以上各实施例仅用以说明本实用新型的技术方案,而非对其限制;尽管参照前述各实施例对本实用新型进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本实用新型各实施例技术方案的范围,其均应涵盖在本实用新型的权利要求和说明书的范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。