1.本实用新型主要涉及仓储管理技术领域,具体涉及一种智能化仓位检测装置。
背景技术:
2.民以食为天,粮食是人们生活当中赖以生存的必需品,饮食吃喝对于民众生计起着至关重要的作用,当小麦和稻谷每年到了收获粮食的季节,国家和生产厂商等多个对粮食有需求的需要进行储粮,因此需要建立大量的粮食仓库,专门用于贮藏粮食。
3.粮食仓库的设计应考虑粮种、仓库储量和建筑费用等因素,在构造上主要应满足粮食安全贮藏和粮食仓库工艺操作所需的条件,现有的主要仓型主要包括房式仓和立筒仓,粮食需经过各个处理步骤后由输送机器送到各个仓中,输送过程中需要及时进行检测仓位的变化,防止溢仓或粮食贮藏量没达到最高限位,造成仓库空间浪费,现有的仓位检测手段有多种,其中激光物位计的使用最为广泛。
技术实现要素:
4.在长时间的使用过程中,激光物位计底部的传感器会附着灰尘,对射出的光线造成阻挡,使得传感器的测量精度下降,造成检测不准且不能及时向输送粮食的机器传达信号,影响正常使用,本实用新型提供了一种智能化仓位检测装置,具有对激光物位计底部灰尘进行清洁,避免因灰尘造成传感器的测量精度下降从而导致物位高度检测不准且不能及时向输送粮食的机器传达信号、影响正常使用的特点。
5.本实用新型提供如下技术方案:一种智能化仓位检测装置,包括仓体,所述仓体的顶部贯通并卡接有进料管,所述进料管与输送机器相连,所述仓体的顶壁上安装有激光物位计,所述激光物位计的左侧固定安装有防附着清理机构,所述仓体的顶板和底板均上下贯通有螺杆安装孔,所述螺杆安装孔的内侧卡接有轴承,轴承的内环中卡接有螺杆,所述仓体的顶部固定安装有第一伺服电机,所述第一伺服电机的输出轴与螺杆的顶端固定连接,所述螺杆贯通并螺纹连接有直线滑轨,所述直线滑轨左侧与滑杆滑动连接,所述直线滑轨的右顶端固定安装有第二伺服电机,所述第二伺服电机下端与整平机构相连,所述仓体顶壁固定安装信号灯和控制盒,所述激光物位计贯穿所述仓体的顶壁并固定安装在所述仓体顶部,所述信号灯位于所述激光物位计的右侧,所述控制盒位于所述信号灯的右侧。
6.其中,所述防附着清理机构包括安装座,所述安装座的底部固定安装有驱动电机,所述驱动电机的输出轴贯穿所述安装座并与清理装置盒固定连接,所述清理装置盒的顶板和底板均贯穿设有通过孔,所述清理装置盒的内后壁固定安装有驱动马达,所述驱动马达的输出轴与转盘固定连接,所述转盘的前壁转动安装有曲柄,所述曲柄的右端与连接杆转动连接,所述连接杆的右端与毛刷板固定连接,所述毛刷板的顶部固定设有刷毛,所述毛刷板的内腔中固定安装有吸尘头,所述吸尘头的底部连接有吸尘软管,所述吸尘软管的另一端穿过清理装置盒底部的通过孔并穿过所述仓体的左侧壁后与吸尘器的吸尘口连接,所述吸尘器固定安装在仓体的左侧壁上,所述清理装置盒的前后内侧壁均向内开有导槽,所述
毛刷板的前后两侧均一体成型有导板,所述导板和导槽滑动连接;所述防附着清理机构工作时,所述驱动电机的输出轴带动所述清理装置盒旋转90度带动毛刷板至激光物位计的正下方,此时清理装置盒与所述仓体左侧壁相垂直,所述防附着清理机构不工作时,所述驱动电机带动所述清理装置盒复位,此时清理装置盒与所述仓体左侧壁相平行,避免对激光物位计监测仓体内粮食高度产生影响。
7.其中,所述整平机构包括直线滑轨,所述直线滑轨的右顶端固定安装有第二伺服电机,所述第二伺服电机的输出轴与第一锥形齿轮固定连接,所述第一锥形齿轮与第二锥形齿轮啮合,所述第二锥形齿轮套接在丝杆的外侧,所述丝杆的左右两侧与直线滑轨的左右内侧壁转动连接,所述直线滑轨的内部滑动连接有滑块,所述滑块被丝杆贯通并与其螺纹连接,所述滑块的底部固定安装有刮板。
8.其中,所述控制盒的内部设有输入信号模块、处理器和单片机;所述控制盒通过内部的单片机控制第一伺服电机带动直线滑轨进行升降,同时输入信号模块接收所述激光物位计的信号,然后通过处理器及时控制输送机器停止向仓内输送粮食,更加的方便快捷,不会造成溢仓的不良后果。
9.其中,所述毛刷板的顶面和底面之间贯通设有圆形通孔,所述圆形通孔在所述毛刷板上均匀分布;通过毛刷板将所述激光物位计底部的灰尘清扫干净,灰尘经所述圆形通孔落入吸尘头中,然后经吸尘器通过所述吸尘软管吸出,去除灰尘的同时降低了灰尘对激光物位计的影响,提高了激光物位计的测量灵敏度。
10.其中,所述螺杆和滑杆分别设有两个,所述螺杆以及滑杆通过连接块与所述直线滑轨相连;激光物位计实时监测仓体内部物料高度变化,并将仓体内物料高度变化数据传输至控制盒,控制盒通过内部的单片机控制第一伺服电机带动直线滑轨进行升降,直线滑轨升降过程中第二伺服电机的输出轴带动第一锥形齿轮连同第二锥形齿轮转动,第二锥形齿轮转动时带动滑块及其底部固定的刮板左右移动,刮板移动过程中对不平整的粮食进行整平。
11.其中,所述刮板的右侧与所述直线滑轨之间的夹角为120度至 130度;角度的设置,使得所述刮板处于倾斜的状态,有利于刮板运动过程中对仓内粮食进行刮平整,使得激光物位计测量的仓内粮食的高度更加精准。
12.本实用新型的有益效果是:
13.(1)第二伺服电机的输出轴带动第一锥形齿轮以及第二锥形齿轮转动,第二锥形齿轮转动时带动丝杆进行转动,丝杆转动时带动滑块及其底部固定的刮板左右滑动,刮板对不平整的粮食进行整平,随着粮食的不断输入,激光物位计将物料高度变化数值传输至控制盒,控制盒通过内部的单片机控制第一伺服电机运转带动螺杆转动,通过螺杆带动直线滑轨随着物料高度的提升向上移动,以适应物料高度的变化,并对物料顶面进行不断的整平,当粮食输入到达仓内预设的高度时,仓体顶部的信号灯亮起,激光物位计将仓体1内物料高度数据传输至控制盒,通过控制盒内部的处理器及时控制输送机器停止向仓内输送粮食,不会导致仓中粮食达不到仓库最大储存位置,避免仓内空间浪费;
14.(2)通过设置清理装置盒,清理装置盒的内后壁固定安装有驱动马达,打开驱动马达的运行开关,驱动马达运行过程中带动转盘及其前壁安装的曲柄进行左右运动,曲柄的右端带动连接杆进行运动,连接杆带动毛刷板一体成型的导板沿导槽进行左右运动,运动
过程中毛刷板的顶部固定的刷毛将激光物位计底部的灰尘清扫下来经圆形通孔落入吸尘头中,然后经吸尘器通过吸尘软管把吸尘头内的灰尘吸出,去除激光物位计底部灰尘,提高了激光物位计的测量灵敏度;
15.(3)激光物位计会由内部的半导体激光器发射连续激光束,激光束遇到被测的粮食表面进行反射,光线返回由激光接收器进行接收,仓体顶部的信号灯亮起,通过控制盒内的输入信号模块接收激光物位计的信号,然后通过处理器及时控制输送机器停止向仓内输送粮食,防止粮食溢仓。
16.该装置中未涉及部分均与现有技术相同或可采用现有技术加以实现。
附图说明
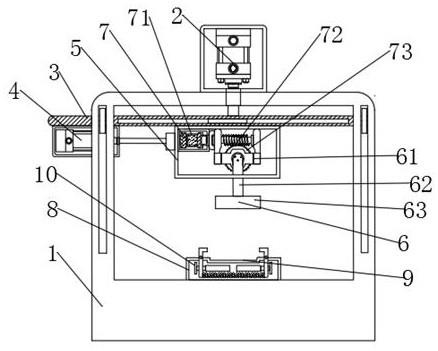
17.图1为本实用新型的正视结构示意图;
18.图2为本实用新型清理装置盒的俯视剖视图;
19.图3为本实用新型的a部位放大的结构示意图;
20.图4为本实用新型的b部位放大的结构示意图;
21.图5为本实用新型中仓体内部的俯视图。
22.图中:1、仓体;2、整平机构;3、激光物位计;4、防附着清理机构;5、毛刷板;6、吸尘头;7、滑杆;8、信号灯;9、控制盒; 10、吸尘器;11、进料管;12、输送机器;13、第一伺服电机;14、第二伺服电机;15、螺杆;16、直线滑轨;17、滑块;18、刮板;19、螺杆安装孔;20、第一锥形齿轮;21、第二锥形齿轮;22、丝杆;24、安装座;25、驱动电机;26、清理装置盒;27、通过孔;28、驱动马达;29、转盘;30、曲柄;31、连接杆;32、吸尘软管;33、导板; 34、导槽;35、圆形通孔。
具体实施方式
23.请参阅图1-图5,本实用新型提供以下技术方案:一种智能化仓位检测装置,包括仓体1,所述仓体1的顶部贯通并卡接有进料管11,所述进料管11与输送机器12相连,所述仓体1的顶壁上安装有激光物位计3,所述激光物位计3的左侧固定安装有防附着清理机构4,所述仓体1的顶板和底板均上下贯通有螺杆安装孔19,所述螺杆安装孔19的内侧卡接有轴承,轴承的内环中卡接有螺杆15,所述仓体 1的顶部固定安装有第一伺服电机13,所述第一伺服电机13的输出轴与螺杆15的顶端固定连接,所述螺杆15贯通并螺纹连接有直线滑轨16,所述直线滑轨16左侧与滑杆7滑动连接,所述直线滑轨16 的右顶端固定安装有第二伺服电机14,所述第二伺服电机14下端与整平机构2相连,所述仓体1顶壁固定安装信号灯8和控制盒9,所述激光物位计3贯穿所述仓体1的顶壁并固定安装在所述仓体1顶部,所述信号灯8位于所述激光物位计3的右侧,所述控制盒9位于所述信号灯8的右侧。
24.所述防附着清理机构4包括安装座24,所述安装座24的底部固定安装有驱动电机25,所述驱动电机25的输出轴贯穿所述安装座24 并与清理装置盒26固定连接,所述清理装置盒26的顶板和底板均贯穿设有通过孔27,所述清理装置盒26的内后壁固定安装有驱动马达 28,所述驱动马达28的输出轴与转盘29固定连接,所述转盘29的前壁转动安装有曲柄30,所述曲柄30的右端与连接杆31转动连接,所述连接杆31的右端与毛刷板5固定连接,所述毛刷板5的顶部固定设有刷毛,所述毛刷板5的内腔中固定安装有吸尘头6,所述吸尘头6
的底部连接有吸尘软管32,所述吸尘软管32的另一端穿过清理装置盒26底部的通过孔27并穿过所述仓体1的左侧壁后与吸尘器 10的吸尘口连接,所述吸尘器10固定安装在仓体1的左侧壁上,所述清理装置盒26的前后内侧壁均向内开有导槽34,所述毛刷板5的前后两侧均一体成型有导板33,所述导板33和导槽34滑动连接;所述防附着清理机构4工作时,所述驱动电机25的输出轴带动所述清理装置盒26旋转90度带动毛刷板至激光物位计3的正下方,此时清理装置盒26与所述仓体1左侧壁相垂直,所述防附着清理机构4 不工作时,所述驱动电机25带动所述清理装置盒26复位,此时清理装置盒26与所述仓体1左侧壁相平行,避免对激光物位计3监测仓体1内粮食高度产生影响。
25.所述整平机构2包括直线滑轨,所述直线滑轨16的右顶端固定安装有第二伺服电机14,所述第二伺服电机14的输出轴与第一锥形齿轮20固定连接,所述第一锥形齿轮20与第二锥形齿轮21啮合,所述第二锥形齿轮21套接在丝杆22的外侧,所述丝杆22的左右两侧与直线滑轨16的左右内侧壁转动连接,所述直线滑轨16的内部滑动连接有滑块17,所述滑块17被丝杆22贯通并与其螺纹连接,所述滑块17的底部固定安装有刮板18。
26.所述控制盒9的内部设有输入信号模块、处理器和单片机;所述控制盒9通过内部的单片机控制第一伺服电机13带动直线滑轨16进行升降,同时输入信号模块接收所述激光物位计3的信号,然后通过处理器及时控制输送机器12停止向仓内输送粮食,更加的方便快捷,不会造成溢仓的不良后果。
27.所述毛刷板5的顶面和底面之间贯通设有圆形通孔35,所述圆形通孔35在所述毛刷板5上均匀分布;通过毛刷板5将所述激光物位计3底部的灰尘清扫干净,灰尘经所述圆形通孔35落入吸尘头6 中,然后经吸尘器10通过所述吸尘软管32吸出,去除灰尘的同时降低了灰尘对激光物位计3的影响,提高了激光物位计3的测量灵敏度。
28.所述螺杆15和滑杆7分别设有两个,所述螺杆15以及滑杆7通过连接块与所述直线滑轨16相连;激光物位计3实时监测仓体1内部物料高度变化,并将仓体1内物料高度变化数据传输至控制盒9,控制盒9通过内部的单片机控制第一伺服电机13带动直线滑轨16进行升降,直线滑轨16升降过程中第二伺服电机14的输出轴带动第一锥形齿轮20连同第二锥形齿轮21转动,第二锥形齿轮21转动时带动滑块17及其底部固定的刮板18左右移动,刮板18移动过程中对不平整的粮食进行整平。
29.所述刮板18的右侧与所述直线滑轨16之间的夹角为120度至 130度;角度的设置,使得所述刮板18处于倾斜的状态,有利于刮板18运动过程中对仓内粮食进行刮平整,使得激光物位计3测量的仓内粮食的高度更加精准。
30.本实用新型的工作原理及使用流程:本装置在使用过程中,操作技术人员首先打开输送机器12的运行开关,然后将粮食从输送机器 12经进料管11进入仓体1内,同时打开激光物位计3实时监测仓体 1内部物料高度变化,此时整平机构2位于仓体1内部空间的最低部,第二伺服电机14的输出轴带动第一锥形齿轮20转动,第一锥形齿轮 20的转动带动第二锥形齿轮21连同丝杆22转动,丝杆22通过螺旋传动带动滑块17及其底部固定的刮板18沿直线滑轨16左右移动,刮板18移动过程中对输入的粮食的堆积物料面进行整平,随着粮食的不断输入,激光物位计3将物料高度变化数值传输至控制盒9,控制盒9通过内部的单片机控制第一伺服电机13运转带动螺杆15转动,通过螺杆15带动直线滑轨16随着物料高度的提升向上移动,以适应物料高度的变化,并对物料顶面进行不断的整平,当粮食输入到达仓内
预设的高度时,仓体1顶部的信号灯8亮起,激光物位计3将仓体 1内物料高度数据传输至控制盒9,通过控制盒9内部的处理器及时控制输送机器12停止向仓内输送粮食,仓体1长时间使用时,仓内扬尘会附着在激光物位计3的底部传感器部位,对传感器造成遮盖,影响激光物位计的正常工作,通过控制盒9可设定防附着清理机构4 的工作时间,定时自动控制防附着清理机构4工作,防附着清理机构4工作时,驱动电机25带动清理装置盒26转动90度至毛刷板5位于激光物位计3的正下方,随后吸尘器10打开,同时驱动马达28运转带动转盘29转动,转盘29的转动牵动曲柄30带动连接杆31进行左右运动,连接杆31带动毛刷板5在导板33和导槽34的配合下进行左右运动,运动过程中毛刷板5顶部的刷毛将激光物位计3底部传感器上附着的灰尘清扫下来,吸尘器10吸力将清扫下来的灰尘经圆形通孔35吸入吸尘头6,并最终通过吸尘软管32吸入吸尘器10的集灰仓中,完成对激光物位计3底部的传感器的清洁,完成清洁后,驱动电机25带动清理装置盒26复位。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。