技术特征:
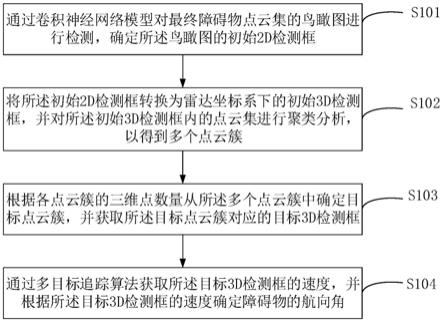
1.一种障碍物航向角的获取方法,其特征在于,所述方法包括:通过卷积神经网络模型对最终障碍物点云集的鸟瞰图进行检测,确定所述鸟瞰图的初始2d检测框;将所述初始2d检测框转换为雷达坐标系下的初始3d检测框,并对所述初始3d检测框内的点云集进行聚类分析,以得到多个点云簇;根据各点云簇的三维点数量从所述多个点云簇中确定目标点云簇,并获取所述目标点云簇对应的目标3d检测框;通过多目标追踪算法获取所述目标3d检测框的速度,并根据所述目标3d检测框的速度确定障碍物的航向角。2.根据权利要求1所述的方法,其特征在于,所述将所述初始2d检测框转换为雷达坐标系下的初始3d检测框,包括:将所述初始2d检测框转换为在雷达坐标系下的修正2d检测框;根据所述修正2d检测框及预设障碍物高度,确定在雷达坐标系下的初始3d检测框。3.根据权利要求1所述的方法,其特征在于,所述初始3d检测框内的点云集的获取,包括:按照所述初始3d检测框对所述最终障碍物点云集进行分割,删除所述初始3d检测框之外的三维点,得到所述初始3d检测框内的点云集。4.根据权利要求1所述的方法,其特征在于,所述最终障碍物点云集的获取,包括:获取原始点云数据,并从所述原始点云数据中删除地面点云集,以得到初始障碍物点云集;按照预设三维体素栅格对所述初始障碍物点云集进行下采样处理,以得到所述最终障碍物点云集。5.根据权利要求4所述的方法,其特征在于,所述地面点云集的获取,包括:从所述原始点云数据中随机选取预设数量的三维点集,根据各三维点集确定对应的平面方程;统计所述原始点云数据中属于各所述平面方程的内点的数量;将内点数量最多的平面方程作为地面方程,并将所述地面方程的全部内点的集合作为所述地面点云集。6.根据权利要求1所述的方法,其特征在于,所述最终障碍物点云集的鸟瞰图的获取,包括:按照预设投影密度将所述最终障碍物点云集投影至二维平面上,得到所述鸟瞰图。7.一种障碍物航向角的获取装置,其特征在于,所述装置包括:检测模块,用于通过卷积神经网络模型对最终障碍物点云集的鸟瞰图进行检测,确定所述鸟瞰图的初始2d检测框;转换模块,用于将所述初始2d检测框转换为雷达坐标系下的初始3d检测框,并对所述初始3d检测框内的点云集进行聚类分析,以得到多个点云簇;第一确定模块,用于根据各点云簇的三维点数量从所述多个点云簇中确定目标点云簇,并获取所述目标点云簇对应的目标3d检测框;第二确定模块,用于通过多目标追踪算法获取所述目标3d检测框的速度,并根据所述
目标3d检测框的速度确定障碍物的航向角。8.一种电子设备,其特征在于,包括存储器以及处理器,所述存储器存储有计算机程序,所述计算机程序在所述处理器运行时执行权利要求1至6中任一项所述的障碍物航向角的获取方法。9.一种车辆,包括车体,其特征在于,还包括如权利要求8中所述的电子设备。10.一种计算机可读存储介质,其特征在于,其存储有计算机程序,所述计算机程序在处理器上运行时执行权利要求1至6中任一项所述的障碍物航向角的获取方法。
技术总结
本申请实施例提供了一种障碍物航向角的获取方法、装置、电子设备及车辆,其中方法包括:通过卷积神经网络模型对最终障碍物点云集的鸟瞰图进行检测,确定鸟瞰图的初始2D检测框;将初始2D检测框转换为雷达坐标系下的初始3D检测框,并对初始3D检测框内的点云集进行聚类分析,以得到多个点云簇;根据各点云簇的三维点数量从多个点云簇中确定目标点云簇,并获取目标点云簇对应的目标3D检测框;通过多目标追踪算法获取所述目标3D检测框的速度,并根据所述目标3D检测框的速度确定障碍物的航向角。这样,可以实现端到端推理,一次性输出障碍物偏航角,提高障碍物航向角的准确度。提高障碍物航向角的准确度。提高障碍物航向角的准确度。
技术研发人员:李勇 严征 胡小波 冯洪亮
受保护的技术使用者:深圳市镭神智能系统有限公司
技术研发日:2021.12.31
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。