1.本技术涉及扫地机器人领域,特别是一种防缠绕扫地机器人及其工作方法。
背景技术:
2.智能化扫地机器人是智能家用电器的一种,能凭借设定的人工智能自动在房间内完成对地板的清理工作,工作过程中通常采用刷、扫和真空吸附结合的方式,将地面杂物扫起后吸纳进入自身的收纳盒中,从而对地面进行清理。
3.扫地机器人在工作时,可以基于导航设备,实现清扫路径的自动规划,从而清扫区域中进行自动清扫。然而在清扫过程中,清扫区域中可能会存在诸如充电线、网线、电路线等线状易缠绕物。在现有技术中,扫地机器人难以对这些线状易缠绕物进行识别,从而导致扫地机器人可能会将这些线状易缠绕物卷入到扫地机器人的滚刷上,致使扫地机器人的滚刷停止转动,影响扫地机器人的正常工作。
4.目前,有的提出了在滚刷侧面安装刀片以剪断缠绕物的方法,虽然能解决大部分缠绕的问题,但存在一定的安全隐患,且这种一刀切的方式对部分非必要剪断的缠绕物例如地毯毯毛、饰品链等极不友好,容易对用户造成损失。
技术实现要素:
5.鉴于所述问题,提出了本技术以便提供克服所述问题或者至少部分地解决所述问题的一种防缠绕扫地机器人及其工作方法。
6.一种防缠绕扫地机器人,所述扫地机器人包括,机器人本体;辊刷罩,设于所述机器人本体底部并对应地面设有开口,所述辊刷罩顶部设有与所述机器人本体内部吸尘泵连通的吸尘口;辊刷,包括辊轴和设于所述辊轴外周的刷尘件,所述辊轴转动设于所述辊刷罩内部以使延伸出所述开口的刷尘件滚动式与地面接触,所述辊轴的两端分别绕其圆弧侧面同轴开设有限位滑槽,并沿其轴线切分成两左右对称的半圆辊;所述扫地机器人还包括,驱动电机,所述驱动电机沿所述辊轴的轴线移动,其动力输出端与所述辊轴的其中一端可拆卸式连接;辊轴支撑部,两所述半圆辊的限位滑槽分别与一所述辊轴支撑部的一端滑动配合;第一伸缩机构,该第一伸缩机构的伸缩端与所述辊轴支撑部的另一端连接,以通过所述辊轴支撑部带动相连接的所述半圆辊沿水平向远离另一所述半圆辊;第二伸缩机构,该第二伸缩机构的伸缩端与所述辊轴支撑部的侧部连接,以通过所述辊轴支撑部带动相连接的所述半圆辊沿竖直向靠近所述吸尘口。
7.优选的,所述辊轴支撑部包括呈三叉连接的第一支撑杆、第二支撑杆和第三支撑杆,所述第二支撑杆和所述第三支撑杆的一端分别连接于所述第一支撑杆的对应两侧部
上,所述第二支撑杆的另一端、所述第三支撑杆的另一端以及同侧的所述第一支撑杆的一端上分别设有滑动配合于所述限位滑槽内的滑块,所述第一伸缩机构的伸缩端与所述第一支撑杆的另一端同轴连接,所述第二伸缩机构的伸缩端连接于所述第一支撑杆的侧部。
8.优选的,所述第二支撑杆和所述第三支撑杆对称设于所述第一支撑杆两侧。
9.优选的,所述第一支撑杆上固定设有第一电磁铁,还滑动设有制动组件,所述制动组件包括与所述半圆辊的半圆弧侧面贴合弧形制动板、与所述弧形制动板靠近第一电磁铁的侧面连接的弹性件以及设于弹性件一端的第一永磁铁,所述第一永磁铁的磁极与所述第一电磁铁的磁极对应且相斥。
10.优选的,所述第一伸缩机构包括竖向设置的第一滑轨,以及滑动设于所述第一滑轨上的第一伸缩电机,所述第一伸缩电机的伸缩端与所述辊轴支撑部的另一端连接。
11.优选的,所述第二伸缩机构包括竖向设置的第二滑轨、滑动设于所述第二滑轨上的套筒,以及与所述套筒侧部连接的第二伸缩电机,所述套筒上设有供所述第一支撑杆穿过的过孔优选的,所述驱动电机底部设有供所述驱动电机向辊轴的其中一端靠近或远离的第三滑轨,以及带动所述驱动电机滑动的第三伸缩电机。
12.优选的,每一所述半圆辊的端侧部分别设有第二永磁铁,对应所诉第二永磁铁设有第二电磁铁,所述第二永磁铁的磁极和所述第二电磁铁的磁极相吸。
13.优选的,其中一所述半圆辊的切面上设有球缺槽,另一所述半圆辊的切面上设有与所述球缺槽配合的球缺凸起。
14.还提供一种防缠绕扫地机器人的工作方法,应用于上述任一项所述的机器人,所述方法包括,通过机器人本体的视觉传感器,采集行程前方的地面图像;通过内嵌的图像识别算法对所述地面图像进行图像识别,当识别到所述地面图像中包括丝状物目标时,执行预设的防缠绕模式;依据防缠绕模式,控制驱动电机停机,并使辊轴的两半圆辊的切面与地面竖直对应;控制第二伸缩机构通过辊轴支撑部带动相连接的所述半圆辊竖直靠向吸尘口;控制第一伸缩机构通过辊轴支撑部带动相连接的所述半圆辊水平远离另一所述半圆辊,两所述半圆辊之间的间隙通道与吸尘口竖直对应;控制吸尘泵对所述吸尘口提供吸附力,以吸纳所述丝状物目标对应的丝状物本技术具有以下优点:在本技术的实施例中,当需要吸纳丝状物时,驱动电机整体移动与辊轴分离,然后通过第一伸缩机构通过辊轴支撑部带动与之连接的半圆辊水平向移动并远离另一半圆辊,两半圆辊同步反向移动预定距离后,位于辊刷罩顶部的吸尘口通过两半圆辊形成的间隙通道与地面正对;接着通过第二伸缩机构竖直向顶起辊轴支撑部并连带与之连接的半圆辊和第一伸缩机构同步远离地面并靠近吸尘口,填补原有辊刷与辊刷罩之间的间隙,提高吸尘口竖直向的吸附力,避免机器人本体前进过程中,因刷尘件与地面接触使丝状物附着而不能被吸尘口吸附的弊端,吸尘口可与地面上的丝状物正对并直接吸纳该丝状物,直接有效的防止丝状物缠绕到辊刷上。
附图说明
15.为了更清楚地说明本技术的技术方案,下面将对本技术的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
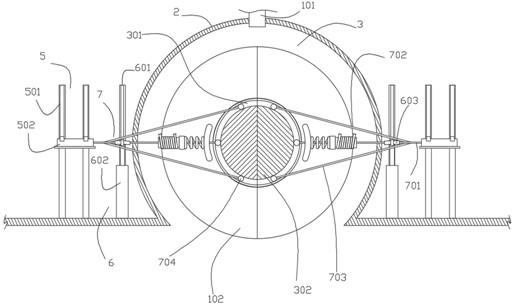
16.图1是本技术一实施例提供的一种防缠绕扫地机器人的内部结构示意图;图2是本技术一实施例提供的一种防缠绕扫地机器人中制动组件移动后结构示意图;图3是本技术一实施例提供的一种防缠绕扫地机器人中辊刷上升结构示意图;图4是本技术一实施例提供的一种防缠绕扫地机器人中辊刷分离结构示意图;图5是本技术一实施例提供的一种防缠绕扫地机器人中制动组件的结构示意图;图6是本技术一实施例提供的一种防缠绕扫地机器人中第二伸缩机构的结构示意图;图7是本技术一实施例提供的一种防缠绕扫地机器人中驱动电机的连接结构示意图;图8是本技术一实施例提供的一种防缠绕扫地机器人中第二电磁铁的结构示意图;图9是本技术一实施例提供的一种防缠绕扫地机器人中机器人本体底部结构示意;图10是本技术一实施例提供的一种防缠绕扫地机器人的工作方法的步骤流程图;图中,1、机器人本体;101,吸尘口;102、刷尘件;2、辊刷罩;3、辊刷;301、限位滑槽;302、半圆辊;4、驱动电机;401、第三滑轨;402、第三伸缩电机;5、第一伸缩机构;501、第一滑轨;502、第一伸缩电机;6、第二伸缩机构;601、第二滑轨;602、第二伸缩电机;603、套筒;7、辊轴支撑部;701、第一支撑杆;702、第二支撑杆;703、第三支撑杆;704、滑块;705、第一电磁铁;706、弧形制动板;707、弹性件;708、第一永磁铁;709、第二永磁铁;710、第二电磁铁;8、球缺凸起。
具体实施方式
17.为使本技术的所述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本技术作进一步详细的说明。显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
18.需要说明的是,本技术的防缠绕扫地机器人具有常规模式和防缠绕模式,当检测到行程前方有如头发、线条或饰品链等丝状物时,则从常规模式切换为防缠绕模式。可通过行程距离计算到达丝状物的估算时长,设定切换为防缠绕模式的时机,可通过丝状物的分布面积计算防缠绕模式的工作时长,以便及时又切换回常规模式。
19.响应于上述两种模式的扫地机器人,如图1-图4所示,一种防缠绕扫地机器人,所述扫地机器人包括,机器人本体1;
辊刷罩2,设于所述机器人本体1底部并对应地面设有开口,所述辊刷罩2顶部设有与所述机器人本体1内部吸尘泵连通的吸尘口101;辊刷3,包括辊轴和设于所述辊轴外周的刷尘件102,所述辊轴转动设于所述辊刷罩2内部以使延伸出所述开口的刷尘件102滚动式与地面接触,所述辊轴的两端分别绕其圆弧侧面同轴开设有限位滑槽301,并沿其轴线切分成两左右对称的半圆辊302;所述扫地机器人还包括,驱动电机4,所述驱动电机4沿所述辊轴的轴线移动,其动力输出端与所述辊轴的其中一端可拆卸式连接;辊轴支撑部7,两所述半圆辊302的限位滑槽301分别与一所述辊轴支撑部7的一端滑动配合;第一伸缩机构5,该第一伸缩机构5的伸缩端与所述辊轴支撑部7的另一端连接,以通过所述辊轴支撑部7带动相连接的所述半圆辊302沿水平向远离另一所述半圆辊302;第二伸缩机构6,该第二伸缩机构6的伸缩端与所述辊轴支撑部7的侧部连接,以通过所述辊轴支撑部7带动相连接的所述半圆辊302沿竖直向靠近所述吸尘口101。
20.可理解的,上述辊轴由两个半圆辊302拼接而成,每一半圆辊302的两端侧分别对应设有一半圆弧状的限位滑槽301,每一半圆弧状的限位滑槽301分别连接一辊轴支撑部7,以构成四个辊轴支撑部7支撑一辊轴并能够使其在驱动电机4的驱动作用下进行转动,每一辊轴支撑部7的同步运动。
21.上述实施例中,通过包括机器人本体1、辊刷罩2、辊刷3、驱动电机4、辊轴支撑部7、第一伸缩机构5和第二伸缩机构6的扫地机器人,其中,所述辊轴的两端分别绕其圆弧侧面同轴开设有限位滑槽301,并沿其轴线切分成两左右对称的半圆辊302;所述驱动电机4沿所述辊轴的轴线移动,其动力输出端与所述辊轴的其中一端可拆卸式连接;两所述半圆辊302的限位滑槽301分别与一所述辊轴支撑部7的一端滑动配合;该第一伸缩机构5的伸缩端与所述辊轴支撑部7的另一端连接,以通过所述辊轴支撑部7带动相连接的所述半圆辊302沿水平向远离另一所述半圆辊302;该第二伸缩机构6的伸缩端与所述辊轴支撑部7的侧部连接,以通过所述辊轴支撑部7带动相连接的所述半圆辊302沿竖直向靠近所述吸尘口101;辊轴通过位于两半圆辊302边侧的辊轴支撑部7支撑,需要扫地时,与驱动电机4连接并由驱动电机4驱动以使其与地面滚动式接触;当需要吸纳丝状物时,驱动电机4整体移动与辊轴分离,然后通过第一伸缩机构5通过辊轴支撑部7带动与之连接的半圆辊302水平向移动并远离另一半圆辊302,两半圆辊302同步反向移动预定距离后,位于辊刷罩2顶部的吸尘口101通过两半圆辊302形成的间隙通道与地面正对;接着通过第二伸缩机构6竖直向顶起辊轴支撑部7并连带与之连接的半圆辊302和第一伸缩机构5同步远离地面并靠近吸尘口101,填补原有辊刷3与辊刷罩2之间的间隙,提高吸尘口101竖直向的吸附力,避免机器人本体1前进过程中,因刷尘件102与地面接触使丝状物附着而不能被吸尘口101吸附的弊端,吸尘口101可与地面上的丝状物正对并直接吸纳该丝状物,直接有效的防止丝状物缠绕到辊刷3上。
22.下面,将对上述实施例中的一种防缠绕扫地机器人作进一步说明。
23.又如图1,在一实施例中,所述辊轴支撑部7包括呈三叉连接的第一支撑杆701、第二支撑杆702和第三支撑杆703,所述第二支撑杆702和所述第三支撑杆703的一端分别连接于所述第一支撑杆701的对应两侧部上,所述第二支撑杆702的另一端、所述第三支撑杆703
的另一端以及同侧的所述第一支撑杆701的一端上分别设有滑动配合于所述限位滑槽301内的滑块704,所述第一伸缩机构5的伸缩端与所述第一支撑杆701的另一端同轴连接,所述第二伸缩机构6的伸缩端连接于所述第一支撑杆701的侧部。
24.上述实施例中,通过三个支撑杆以三叉形式连接后与辊轴配合,两半圆辊302的两侧分别设置以辊轴支撑架,辊轴的整圆面上环绕六个支点,为转轴转动提供有效的多向支撑,同时采用单个滑块704配合便于装配。
25.在本实施例中,所述第二支撑杆702和所述第三支撑杆703对称设于所述第一支撑杆701两侧。
26.通过第二支撑杆702和第三支撑杆703对称设置,使辊轴整圆面上的六个支点呈等分分布,支撑结构更加稳定。
27.又如图1和图5所示,在本实施例中,所述第一支撑杆701上固定设有第一电磁铁705,还滑动设有制动组件,所述制动组件包括与所述半圆辊302的半圆弧侧面贴合弧形制动板706、与所述弧形制动板706靠近第一电磁铁705的侧面连接的弹性件707以及设于弹性件707一端的第一永磁铁708,所述第一永磁铁708的磁极与所述第一电磁铁705的磁极对应且相斥。
28.需要说明的是,上述第一支撑杆701为方管,可防止制动组件侧向滑动,使弧形制动板706的一侧面始终能与半圆辊302的半圆弧侧面贴合。
29.可理解的,半圆辊302与辊轴支撑部7是滑动连接的,当两半圆辊302分离后,半圆辊302会沿限位滑槽301滑离滑块704,通过增加滑块704与半圆辊302上的限位滑槽301之间摩擦力可解决分离后滑离的问题,但摩擦力增大对电机负荷较重,影响电机的使用寿命。
30.第一电磁铁705包括套设于第一支撑杆701上的铁芯和缠绕于铁芯上的导电绕组,如图2所示,当第一电磁铁705通电后,产生与第一永磁铁708相斥的磁极,进而给制动组件以靠近半圆辊302的推力,弧形制动板706贴合半圆辊302的半圆弧侧面后,在持续的推力下弹性件707被压缩,使弧形制动板706与半圆弧侧面贴合更紧密,从而达到对半圆辊302侧向转动的制动作用,防止半圆辊302滑离辊轴支撑部7;当第一电磁铁705断电后,磁性失效,由于第一永磁铁708的磁性吸附于第一电磁铁705的铁芯上,又使制动组件远离半圆辊302,降低对辊刷3转动扫地时的摩擦力。
31.在本实施例中,所述滑块704为球状,所述球状的滑块704与所述限位滑槽301的内侧面相切。
32.在一实施例中,所述第一伸缩机构5包括竖向设置的第一滑轨501,以及滑动设于所述第一滑轨501上的第一伸缩电机502,所述第一伸缩电机502的伸缩端与所述辊轴支撑部7的另一端连接。
33.还可以在第一滑轨501上固定设置一第一伸缩电机502的支撑座,使第一伸缩机构5在第一滑轨501上滑动前,其伸缩端与转轴分离为两半圆辊302前的轴线处于同一水平,保证两半圆辊302拼合之前水平对应。
34.如图6所示,在一实施例中,所述第二伸缩机构6包括竖向设置的第二滑轨601、滑动设于所述第二滑轨601上的套筒603,以及与所述套筒603侧部连接的第二伸缩电机602,所述套筒603上设有供所述第一支撑杆701穿过的过孔。
35.可理解的,第二伸缩电机602设于第一支撑杆701中部,通过第二伸缩电机602带动
套筒603,同步带动第一支撑杆701以及与之相连的半圆辊302上下移动。
36.如图7所示,在一实施例中,所述驱动电机4底部设有供所述驱动电机4向辊轴的其中一端靠近或远离的第三滑轨401,以及带动所述驱动电机4滑动的第三伸缩电机402。
37.可理解的,如图8所示,辊轴与驱动电机4对应的一端端部为多边形结构,所述驱动电机4的动力输出端上设有与该多边形结构匹配的炮筒;通过第三伸缩电机402带动驱动电机4上的炮筒可直接与辊轴的端部结合,从而快速驱动辊刷3转动。
38.又如图8所示,在一实施例中,每一所述半圆辊302的端侧部分别设有第二永磁铁709,对应所诉第二永磁铁709设有第二电磁铁710,所述第二永磁铁709的磁极和所述第二电磁铁710的磁极相吸。
39.需要说明的是,可在每一半圆辊302的一端设置一第二永磁铁709,每一第二永磁铁709对应设一相吸的第二电磁铁710。当检测到前方地面上有丝状物时,可控制驱动电机4提前停机,通过第三伸缩电机402将驱动电机4与辊轴分离。
40.在这种情况下,两半圆辊302的切面并非与地面竖直对应,无法使辊轴呈竖直状态对半分离,两半圆辊302形成的间隙通道与吸尘口101无法竖直对应,致使难以通过吸尘口101直接吸纳地面的丝状物。
41.为避免上述问题,在驱动电机4的外侧设一向辊轴端部延伸的支撑架,支撑架的一端延伸超过驱动电机4的动力输出端并设有与第二永磁铁709对应的第二电磁铁710,当驱动电机4与辊轴端部分离后,第二电磁铁710经过与第二永磁铁709对应位置,通过磁性相吸,将辊轴具有第二永磁铁709的侧面牵引旋转至与第二电磁铁710对应。
42.需要说明的是,当第二永磁铁709与第二电磁铁710相吸时,两所述半圆辊302的切面与地面竖直对应。
43.另一种方式,驱动电机4搭配编码器,可控制驱动电机4停止转动时,两所述半圆辊302的切面与地面竖直对应,本方式为本领域技术人员所熟知的技术手段,本技术不作赘述。
44.如图4所示,在一实施例中,其中一所述半圆辊302的切面上设有球缺槽,另一所述半圆辊302的切面上设有与所述球缺槽配合的球缺凸起8。
45.通过上述的球缺槽和球缺凸起8的配合,对两半圆辊302拼接时提供导向作用,使其中心对应,以拼接成一个完整的辊轴。
46.需要说明的是,机器人本体1内部设有控制器和电源,分别与上述的驱动电机4、第三伸缩电机402、第一伸缩电机502、第二伸缩电机602、第一电磁铁705、第二电磁铁710以及吸尘泵电连接,以控制上述装置执行相关动作完成对地面丝状物的吸纳清扫。
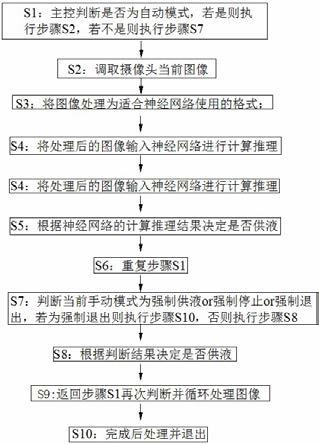
47.如图10,在一实施例中,上述防缠绕扫地机器人的工作方法,包括:s1,通过机器人本体的视觉传感器,采集行程前方的地面图像;s2,通过内嵌的图像识别算法对所述地面图像进行图像识别,当识别到所述地面图像中包括丝状物目标时,执行预设的防缠绕模式;s3,依据防缠绕模式,控制驱动电机停机,并使辊轴的两半圆辊的切面与地面竖直对应;s4,控制第二伸缩机构通过辊轴支撑部带动相连接的所述半圆辊竖直靠向吸尘口;
s5,控制第一伸缩机构通过辊轴支撑部带动相连接的所述半圆辊水平远离另一所述半圆辊,两所述半圆辊之间的间隙通道与吸尘口竖直对应;s6,控制吸尘泵对所述吸尘口提供吸附力,以吸纳所述丝状物目标对应的丝状物。
48.尽管已描述了本技术实施例的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术实施例范围的所有变更和修改。
49.最后,还需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者终端设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者终端设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者终端设备中还存在另外的相同要素。
50.以上对本技术所提供的防缠绕扫地机器人及其工作方法,进行了详细介绍,本文中应用了具体个例对本技术的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本技术的方法及其核心思想;同时,对于本领域的一般技术人员,依据本技术的思想,在具体实施方式及应用范围上均会有改变之处,综上所述,本说明书内容不应理解为对本技术的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。