技术特征:
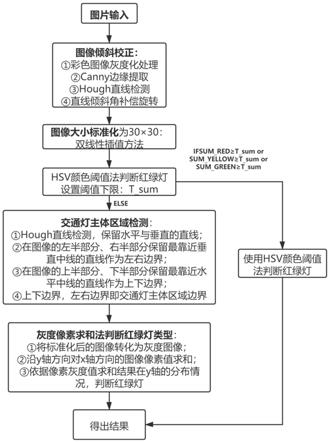
1.一种基于先验信息的交通信号灯快速精确的识别方法,其特征在于,包括以下步骤:步骤1.对交通信号灯图像进行预处理,包括图像倾斜校正和图像大小标准化处理;步骤2.对步骤1预处理后得到的图像采用hsv颜色空间法判断交通信号灯类型,如果能够判断,则直接输出判断结果;否则进入步骤3;步骤3.对步骤1预处理后得到的图像中交通信号灯的主体区域进行检测,包括canny边缘检测、hough直线检测和交通信号灯边界确定;其中,边界确定的具体过程为:筛选所有检测到的直线,设定直线需满足的角度范围,保留其中水平和垂直的直线;针对水平直线,以距离信号灯图像水平中线最近的两条水平直线作为交通信号灯主体区域的上下边界;针对垂直直线,以距离垂直中线最近的两条垂直直线作为交通信号灯主体区域的左右边界;步骤4.对步骤3主体区域沿垂直方向进行三等分,对等分得到的每部分的灰度像素值进行求和,求和方式为沿着图像垂直方向,对水平方向的灰度像素值进行求和,然后根据三部分的灰度值结果判断交通信号灯的类型。2.如权利要求1所述的识别方法,其特征在于,所述先验信息为:交通信号灯的形状均为竖状,并且红灯在上、黄灯在中、绿灯在下。3.如权利要求1所述的识别方法,其特征在于,步骤1中所述交通信号灯图像为单个交通信号灯所在的局部区域。4.如权利要求1所述的识别方法,其特征在于,步骤1中所述图像倾斜校正包括rgb彩色图像灰度化处理、canny边缘检测、hough直线检测以及直线倾斜角补偿旋转四个步骤。5.如权利要求4所述的识别方法,其特征在于,所述图像倾斜校正中的直线倾斜角补偿的具体过程为:选取所有检测到的直线中长度最长的直线的倾斜角作为旋转补偿角度,实现图像倾斜校正。6.如权利要求1所述的识别方法,其特征在于,步骤1中所述图像大小标准化采用最近邻插值法、双线性插值法或双三次插值法。7.如权利要求1所述的识别方法,其特征在于,步骤3中若直线的角度θ范围满足θ∈[-10,10]∪[80,110],则认为该直线为水平直线或者垂直直线。8.如权利要求1所述的识别方法,其特征在于,步骤2中采用hsv颜色空间法判断交通信号灯类型的具体过程为:rgb彩色图像转化为hsv颜色空间的转换公式如下所示,s=(max(r,g,b)-min(r,g,b))/max(r,g,b)v=max(r,g,b)其中,h为色调,s为饱和度,v为亮度;红色,黄色,绿色的h参数范围:180≥h
red
≥
150and0≥h
red
≥10,60≥h
yellow
≥10,100≥h
green
≥70,s、v参数范围均满足:255≥s≥s
low
,255≥v≥140,s
low
=int(average(s
current_image
)
×
1.3);统计分别满足红色、黄色、绿色的hsv颜色范围像素点的个数sum
red
、sum
yellow
、sum
green
;设置阈值t,若sum
red
、sum
yellow
、sum
green
的值只有一个满足sum≥t,则对应的颜色即为交通信号灯的判断结果;若至少有一个满足sum≥t,则比较三者的最大值,其对应的颜色即为交通信号灯的判断结果。
技术总结
本发明的目的在于提供一种基于先验信息的交通信号灯快速精确的识别方法,属于智能交通信息检测技术领域。该方法针对现有HSV颜色空间识别法存在的难以选取核实分量范围使得识别结果精确的问题,增加对交通信号灯主体区域检测步骤,然后对主体区域的灰度值进行求和从而判断交通信号灯的类型,完成识别。该方法能够在图像中发生严重颜色失真的情况下仍能保持高识别准确率,提高了在不同环境、天气下的适应能力;同时,由于本发明未采用机器学习或深度学习的方法,也大大降低了对设备的要求,避免了长时间的模型选择与训练,同时又兼顾识别快速、准确的优点。准确的优点。准确的优点。
技术研发人员:陈章勇 曾杨帆 陈勇 陈松格
受保护的技术使用者:电子科技大学
技术研发日:2021.11.26
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。