1.本发明属于垃圾焚烧技术领域,具体涉及一种垃圾焚烧行业炉膛清焦机器人。
背景技术:
2.目前很多垃圾电厂炉膛都面临结焦问题,经常停炉清焦,常规采用人工清焦,不仅费时费力,还伴随着施工安全的问题。
3.炉膛焦块:是指位于焚烧炉出口处,焦块会使锅炉出力降低,增大排烟损失,降低焚烧效率,严重时还会造成被迫停炉,缩短了焚烧炉的使用寿命。
4.工人采用电镐、风镐进行清焦,工人高空作业存在安全隐患;清焦效率慢导致下部焚烧炉排无法进行检修、大修,进而延长停炉时间,不利于垃圾电厂的经济效益。
5.因此,需要研发设计一款清焦机器人,提高清焦效率、减少清焦人员、减少停炉时间,保证施工安全,且能带来经济效益。
技术实现要素:
6.本发明的目的是提供一种垃圾焚烧行业炉膛清焦机器人。
7.为了解决上述技术问题,本发明提供了一种垃圾焚烧行业炉膛清焦机器人,其包括:主机体、保护机构、旋转机构、执行机构和控制模块;其中所述保护机构设置在主机体的侧壁上,所述旋转机构位于主机体的下端面,所述执行机构设置在旋转机构上;所述主机体适于吊放进入焚烧炉内;所述控制模块适于控制保护机构伸展,抵住焚烧炉的水冷壁后,对水冷壁进行保护,并起到辅助支撑作用;控制旋转机构转动,以使执行机构转向焚烧炉内壁上需要清理的焦块,并进行清理。
8.第二方面,本发明还提供了一种垃圾焚烧行业炉膛清焦机器人的工作方法,其包括:将主机体吊入焚烧炉内;控制保护机构打开;控制旋转机构旋转;控制执行机构清理焦块。
9.本发明的有益效果是,本发明通过采用远程操作控制保护机构、旋转机构、执行机构,以对焚烧炉出口处焦块进行清理,不仅清焦效率高,提高垃圾电厂经济效益,又能避免工人高空作业,降低施工风险。
10.本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点在说明书以及附图中所特别指出的结构来实现和获得。
11.为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
12.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的
附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
13.图1是本发明的垃圾焚烧行业炉膛清焦机器人的结构示意图;
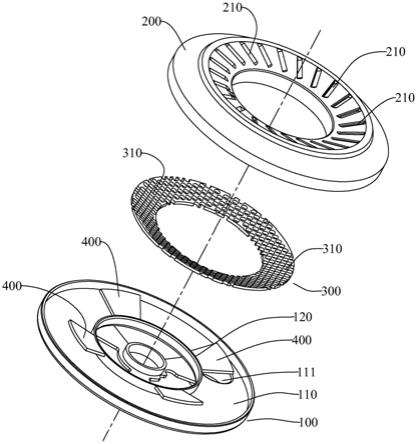
14.图2是本发明的垃圾焚烧行业炉膛清焦机器人的旋转机构的结构示意图;
15.图3是本发明的垃圾焚烧行业炉膛清焦机器人的工作原理图。
16.图中:
17.主机体1、吊装环11、保护机构2、伸展组件21、保护臂211、保护轮212、保护臂液压缸213、旋转机构3、固定座31、液压马达32、涡轮回转装置33、执行机构4、第一伸缩组件41、第一机器臂411、第一液压缸412、连接凸台413、第二伸缩组件42、第二机器臂421、第二液压缸422、第三伸缩组件43、第三机器臂431、第三液压缸432、冲击钻44。
具体实施方式
18.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
19.实施例
20.如图1所示,本实施例提供了一种垃圾焚烧行业炉膛清焦机器人,其包括:主机体1、保护机构2、旋转机构3、执行机构4和控制模块;其中所述保护机构2设置在主机体1的侧壁上,所述旋转机构3位于主机体1的下端面,所述执行机构4设置在旋转机构3上;所述主机体1适于吊放进入焚烧炉内;所述控制模块适于控制保护机构2伸展,抵住焚烧炉的水冷壁后,对水冷壁进行保护,并起到辅助支撑作用;控制旋转机构3转动,以使执行机构4转向焚烧炉内壁上需要清理的焦块,并进行清理。
21.在本实施方式中,具体的,通过设置与控制模块电性连接的保护机构2、旋转机构3、执行机构4,通过远程操作控制保护机构2、旋转机构3、执行机构4,以对焚烧炉出口处焦块进行清理,不仅清焦效率高,提高垃圾电厂经济效益,又能避免工人高空作业,降低施工风险。
22.在本实施方式中,具体的,控制模块可以但不限于采用单片机。
23.在其中一个应用场景中,本垃圾焚烧行业炉膛清焦机器人可配置一个操控手柄,控制模块设置在操控手柄中,操控手柄通过有线或无线与保护机构2、旋转机构3、执行机构4中的驱动部件电性连接,采用人工视觉观察或在主机体1上设置摄像头,看清焚烧炉内壁上焦块的位置,再通过操控手柄驱动各部件动作,以完成清焦。
24.在本实施例中,所述主机体1的上端面设置有吊装环11;所述保护机构2包括:至少三个均匀分布在主机体1侧壁上的伸展组件2。
25.在本实施方式中,具体的,当采用三个伸展组件21时,呈等边三角形均匀分布在主机体1的侧壁上。
26.在本实施例中,所述伸展组件21包括:保护臂211、保护轮212和保护臂液压缸213;其中所述保护臂211的一端通过销轴与主机体1的下端侧壁相连,所述保护轮212设置在保护臂211的另一端,所述保护臂液压缸213的固定端通过销轴与主机体1的侧壁相连,所述保
护臂液压缸213的驱动端通过销轴与保护臂211的臂身相连;所述控制模块与各保护臂液压缸213电性连接,适于控制保护臂液压缸213伸缩,带动保护臂211绕保护臂211端部的销轴转动,即当所述保护臂211展开,使保护轮212抵于焚烧炉的内壁上时,所述主机体1稳定在焚烧炉内;当所述保护臂211收缩时,所述主机体1取出焚烧炉。
27.在本实施方式中,具体的,伸展组件21在固定主机体1的同时,也起到了保护水冷壁的作用;保护轮212可以但不限于采用橡胶轮,橡胶材质能有效的防止保护轮212对水冷壁造成损伤;控制模块同时控制各保护臂液压缸213同步伸缩,以适应不同内径的焚烧炉。
28.如图2所示,在本实施例中,所述旋转机构3包括:固定座31、液压马达32和涡轮回转装置33;其中所述涡轮回转装置33的上部与主机体1的下端面固定连接,所述涡轮回转装置33的下部与固定座31固定连接,所述涡轮回转装置33的上部与所述涡轮回转装置33的下部转动连接,所述执行机构4设置在固定座31的侧壁上;所述控制模块与液压马达32电性连接,适于控制液压马达32驱动涡轮回转装置33的下部转动,以带动固定座31转动,即控制所述执行机构4转向焚烧炉内壁上需要清理的焦块。
29.在本实施方式中,具体的,液压马达32为涡轮回转装置33的动力源,液压马达32与涡轮回转装置33齿轮传动,可驱动执行机构4实现三百六十度旋转;采用人工观察或设置摄像头观察焚烧炉内壁上的焦块位置,通过操作对应的手柄,驱动对应的部件工作,实现清理焦块。
30.在本实施例中,所述执行机构4包括:第一伸缩组件41、第二伸缩组件42、第三伸缩组件43和冲击钻44;其中所述第一伸缩组件41与固定座31相连,所述第二伸缩组件42与第一伸缩组件41相连,所述第三伸缩组件43与第二伸缩组件42相连,所述冲击钻44与第三伸缩组件43相连;所述第一伸缩组件41包括:第一机器臂411和第一液压缸412;所述第一机器臂411的臂身上部设置有连接凸台413;所述第一液压缸412的两端分别通过销轴与固定座31、连接凸台413相连;所述第一机器臂411的两端分别通过销轴与固定座31、第二伸缩组件42相连;所述控制模块与第一液压缸412电性连接,适于控制第一液压缸412伸缩,以带动第一机器臂411下降、抬升。
31.在本实施方式中,具体的,第二伸缩组件42不产生动作时,第一机器臂411下降、抬升,可带动与其相连的第二伸缩组件42随之下降、抬升。
32.在本实施例中,所述第二伸缩组件42包括:第二机器臂421和第二液压缸422;其中所述第二机器臂421的一端通过销轴与所述第一机器臂411相连,所述第三伸缩组件43与第二机器臂421的另一端相连;所述第二液压缸422的两端分别通过销轴与连接凸台413、第二机器臂421的臂身相连;所述控制模块与第二液压缸422电性连接,适于控制第二液压缸422伸缩,以带动第二机器臂421下降、抬升。
33.在本实施方式中,具体的,第三伸缩组件43不产生动作时,第二机器臂421下降、抬升,可带动与其相连的第三伸缩组件43随之下降、抬升。
34.在本实施例中,所述第三伸缩组件43包括:第三机器臂431和第三液压缸432;其中所述第三机器臂431的一端与第二机器臂421固定连接,所述冲击钻44通过销轴与第三机器臂431的另一端相连;所述第三液压缸432的两端分别通过销轴与第二机器臂421、冲击钻44相连;所述控制模块与第三液压缸432电性连接,适于控制第三液压缸432伸缩,以带动冲击钻44抬升、下降。
35.在本实施例中,所述控制模块与冲击钻44电性连接,适于控制冲击钻44清理焚烧炉内壁上的焦块。
36.在本实施方式中,具体的,控制模块可以分别控制第一液压缸412、第二液压缸422、第三液压缸432伸缩,以调整冲击钻44位置与角度,便于清理焦块。
37.在本实施例中,还提供一种垃圾焚烧行业炉膛清焦机器人的工作方法,其包括:将主机体1吊入焚烧炉内;控制保护机构2打开;控制旋转机构3旋转;控制执行机构4清理焦块。
38.综上所述,本垃圾焚烧行业炉膛清焦机器人通过控制模块远程操作控制保护机构2、旋转机构3、执行机构4,以对焚烧炉出口处焦块进行清理,不仅清焦效率高,提高垃圾电厂经济效益,又能避免工人高空作业,降低施工风险。
39.在本发明实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
40.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
41.在本技术所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,又例如,多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些通信接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
42.所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
43.另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
44.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。