技术特征:
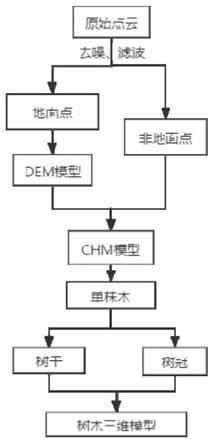
1.一种基于车载激光点云数据的城市树木三维可视化方法,包括以下步骤:步骤1、去噪与滤波:将场景点云中的噪声剔除并分离地面点与非地面点;步骤2、单木分割与树干树冠提取:将滤波后的数据进行归一化处理,得到冠层高度模型(chm,canopy height model)。使用基于chm单木分割算法提取出单木。之后利用基于圆柱拟合的方法从单木中分离树干和树冠。步骤3、表面重构:使用alpha-shape算法对树干和树冠分别构建三维模型,步骤如下:3-1、设置距离阈值α3-2、构建待建模点集q={qi},(i=1,2,
…
n),从中任选一个点q1,与之距离小于2α的点构成新的点集q1,从点集q1中任取一组点q2和q3,求出过点q1、q2、q3且半径为α的球以及球心o1、o2;3-3、遍历点集q1,依次求出其他点到球心o1、o2的距离集合l1、l2。如果l1和l2中有一个集合的距离均大于α,则q1、q2、q3为边缘轮廓点,连接三点构成边界三角面片;反之,则不是边缘轮廓点,停止遍历,执行下一步;3-4、选择点集q1中的下一组点按步骤(2)、(3)进行判断,直到点集q1中的所有点判断结束。输出三角面片集合,集合中暴露的三角面片形成局部凸包;3-5、选择点集q中下一个点按步骤(2)、(3)、(4)进行判断,直到点集q中的所有点判断结束,多个凸包重构表面s(q)。步骤4、三维可视化:将单株木对应的树干树冠模型组合,完成城市树木三维可视化。2.如权利要求1所述基于车载激光点云数据的城市树木三维可视化方法,其特征在于:所述步骤1中采用csf算法分离场景点云中的地面点与非地面点。
技术总结
本发明属于车载激光雷达点云数据处理技术领域,具体涉及一种基于车载激光点云数据的城市树木三维可视化方法。基于原始点云数据,经树木分割、树冠树干分离后,对树干和树冠单独建模,最后构建城市场景下的树木三维模型。相比于传统的树木三维建模方法,能够根据树干和树冠的不同形态特征进行单独建模,避免了单树建模形态特征表达不精确的缺点,能够简单、快速、准确地构建出城市树木三维模型,可以应用于林业资源调查、3D城市建模,树木参数提取等诸多领域。等诸多领域。等诸多领域。
技术研发人员:李世华 赵顺达 尤航凯
受保护的技术使用者:电子科技大学长三角研究院(湖州)
技术研发日:2021.12.06
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。