技术特征:
1.一种计算机辅助设备,其包括:致动器;器械,所述器械包括:末端执行器,所述末端执行器位于所述器械的远端处;以及一个或多个驱动机构,所述一个或多个驱动机构用于将来自所述致动器的力或扭矩耦合到所述末端执行器;以及一个或多个处理器,其中为了用所述器械执行操作,所述一个或多个处理器经配置以根据状态机操作所述末端执行器;其中:所述状态机包括第一夹持状态和第二夹持状态;在所述第一夹持状态中,所述致动器的速度设定点设定为第一速度;在所述第二夹持状态中,所述致动器的所述速度设定点设定为低于所述第一速度的第二速度;当通过所述致动器施加的力或扭矩在第一阈值之上时,所述状态机从所述第一夹持状态转变至所述第二夹持状态;以及当通过所述致动器施加的所述力或扭矩在第二阈值之下时,所述状态机从所述第二夹持状态转变至所述第一夹持状态。2.根据权利要求1所述的计算机辅助设备,其中:所述状态机还包括等待状态;并且当通过所述致动器施加的所述力或扭矩在高于所述第一阈值的最大阈值之上时,所述状态机从所述第二夹持状态转变至所述等待状态。3.根据权利要求1所述的计算机辅助设备,其中所述操作包括抓取、吻合以及切割中的一个或多个。4.根据权利要求1所述的计算机辅助设备,其中所述第二阈值等于或低于所述第一阈值。5.根据权利要求1所述的计算机辅助设备,其中所述第一速度和所述第二速度根据速度分布来确定。6.根据权利要求5所述的计算机辅助设备,其中所述速度分布为单调的。7.根据权利要求1-6中任一项所述的计算机辅助设备,其中所述第一速度和所述第二速度基于所施加的力或扭矩来确定。8.根据权利要求1-6中任一项所述的计算机辅助设备,其中所述第一阈值和所述第二阈值基于所施加的力或扭矩而变化。9.根据权利要求1-6中任一项所述的计算机辅助设备,其中所述一个或多个处理器进一步经配置以在到达目标位置时指示成功。10.一种非暂时性机器可读介质,所述非暂时性机器可读介质包括多个机器可读指令,所述多个机器可读指令在通过与计算机辅助设备相关联的一个或多个处理器执行时适于使得所述一个或多个处理器执行包括以下操作的方法:根据状态机操作末端执行器,所述状态机包括第一夹持状态和第二夹持状态,其中在所述第一夹持状态中,致动器的速度设定点设定为第一速度,并且在所述第二夹持状态中,
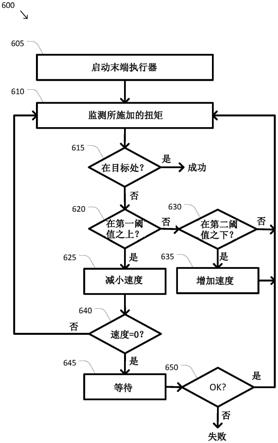
所述致动器的所述速度设定点设定为低于所述第一速度的第二速度;当通过所述致动器施加的力或扭矩在第一阈值之上时,将所述状态机从所述第一夹持状态转变至所述第二夹持状态;以及当通过所述致动器施加的所述力或扭矩在第二阈值之下时,将所述状态机从所述第二夹持状态转变至所述第一夹持状态。11.根据权利要求10所述的非暂时性机器可读介质,其中:所述状态机还包括等待状态;并且所述方法还包括当通过所述致动器施加的所述力或扭矩在高于所述第一阈值的最大阈值之上时,将所述状态机从所述第二夹持状态转变至所述等待状态。12.根据权利要求10所述的非暂时性机器可读介质,其中所述第二阈值等于或低于所述第一阈值。13.根据权利要求10所述的非暂时性机器可读介质,其中所述第一速度和所述第二速度根据速度分布来确定。14.根据权利要求10-13中任一项所述的非暂时性机器可读介质,其中:所述第一速度和所述第二速度基于所施加的力或扭矩来确定;或者所述第一阈值和所述第二阈值基于所施加的力或扭矩而变化。15.一种计算机辅助设备,其包括:致动器;器械,所述器械包括:末端执行器,所述末端执行器位于所述器械的远端处;以及一个或多个驱动机构,所述一个或多个驱动机构用于将来自所述致动器的力或扭矩耦合到所述末端执行器;以及一个或多个处理器,其中为了用所述器械执行操作,所述一个或多个处理器经配置以:将所述致动器的速度设定点设定为初始速度;基于所述速度设定点来驱动所述致动器;监测通过所述致动器施加的力或扭矩;当所施加的力或扭矩在第一阈值之上时:减小所述速度设定点,并且基于减小的速度设定点来驱动所述致动器;以及当所述所施加的力或扭矩在最大阈值之上时:将所述速度设定点减小至零,等待预定时间段,将所述速度设定点设定为非零值,并且基于所述非零速度设定点来驱动所述致动器;其中所述第一阈值低于所述最大阈值。16.根据权利要求15所述的计算机辅助设备,其中:所述一个或多个处理器进一步经配置以,当所述所施加的力或扭矩在第二阈值之下时,增加所述速度设定点;并且所述第二阈值低于所述第一阈值。
17.根据权利要求15或16所述的计算机辅助设备,其中在所述等待之后,所述一个或多个处理器进一步经配置以:确定所述所施加的力或扭矩是否继续处于所述最大阈值之上;以及在所述所施加的力或扭矩继续处于所述最大阈值之上时指示失败。18.根据权利要求15或16所述的计算机辅助设备,其中在所述等待之后,所述一个或多个处理器进一步经配置以:确定所述所施加的力或扭矩是否继续处于所述最大阈值之上;以及在所述所施加的力或扭矩继续处于所述最大阈值之上时将所述速度设定点设定回零并再次等待。19.根据权利要求18所述的计算机辅助设备,其中所述一个或多个处理器进一步经配置以,在预定数量的等待周期之后在所述所施加的力或扭矩继续处于所述最大阈值之上时指示失败。20.根据权利要求15或16所述的计算机辅助设备,其中在所述等待之后,所述一个或多个处理器进一步经配置以,在所述所施加的力或扭矩继续处于所述最大阈值之上时使所述末端执行器的驱动反向。21.一种非暂时性机器可读介质,所述非暂时性机器可读介质包括多个机器可读指令,所述多个机器可读指令在通过与计算机辅助设备相关联的一个或多个处理器执行时适于使得所述一个或多个处理器执行包括以下操作的方法:将致动器的速度设定点设定为初始速度;基于所述速度设定点来驱动所述致动器;监测通过所述致动器施加的力或扭矩;当所施加的力或扭矩在第一阈值之上时:减小所述速度设定点,并且基于减小的速度设定点来驱动所述致动器;以及当所述所施加的力或扭矩在最大阈值之上时:将所述速度设定点减小至零,等待预定时间段,将所述速度设定点设定为非零值,并且基于所述非零速度设定点来驱动所述致动器;其中所述第一阈值低于所述最大阈值。22.根据权利要求21所述的非暂时性机器可读介质,其中:所述方法还包括,当所述所施加的力或扭矩在第二阈值之下时,增加所述速度设定点;并且所述第二阈值低于所述第一阈值。23.根据权利要求21或22所述的非暂时性机器可读介质,其中所述方法还包括,在所述等待之后,确定所述所施加的力或扭矩是否继续处于所述最大阈值之上;以及在所述所施加的力或扭矩继续处于所述最大阈值之上时指示失败。24.根据权利要求21或22所述的非暂时性机器可读介质,其中所述方法还包括,在所述
等待之后,确定所述所施加的力或扭矩是否继续处于所述最大阈值之上;以及在所述所施加的力或扭矩继续处于所述最大阈值之上时将所述速度设定点设定回零并再次等待。25.根据权利要求21或22所述的非暂时性机器可读介质,其中所述方法还包括,在所述等待之后,在所述所施加的力或扭矩继续处于所述最大阈值之上时使所述末端执行器的驱动反向。
技术总结
本申请涉及用于可变速度手术器械的系统和方法,并公开一种计算机辅助医疗设备中的手术器械的可变速度控制的系统和方法,该手术器械包含位于器械的远端处的末端执行器、致动器,以及用于将来自所述致动器的力或扭矩耦合到末端执行器的驱动机构。为了用器械执行操作,计算机辅助医疗设备将致动器的速度设定点设定为初始速度、监测通过致动器施加的力或扭矩、在所施加的力或扭矩在第一阈值之上时减小速度设定点、在所施加的力或扭矩在第二阈值之下时增加速度设定点、在所施加的力或扭矩在最大阈值之上时将速度设定点减小至零,并且基于速度设定点来驱动致动器。第一阈值和第二阈值低于最大阈值。低于最大阈值。低于最大阈值。
技术研发人员:M
受保护的技术使用者:直观外科手术操作公司
技术研发日:2017.01.27
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。