1.本发明涉及医疗器械技术领域,尤其涉及一种基于脑深部刺激电极同步刺激和记录控制系统。
背景技术:
2.深部脑刺激已在临床上广泛用于治疗帕金森病等疾病引起的运动障碍,它在难治性癫痫、顽固性强迫症等其他脑中枢神经系统疾病的治疗上也展现出良好的应用前景,申请号为cn202111030360.2的专利公开了一种基于多信号的闭环深部脑刺激系统,该系统能实现基于信号的策略性脑刺激,相较于传统的仅以颅内场电位信号为数据依据的方案,闭环刺激控制精度更高。
3.但是该基于多信号的闭环深部脑刺激系统也存在影响问题,例如多个电极在进行刺激作业过程中常常无法同步刺激,彼此之间存在时间差,从而影响刺激效果,而且电极多是直接放在头部,连接性差,在头部晃动或受到触碰时便容易松动脱落,导致电极滑落,从而无法对相应区域进行刺激。
技术实现要素:
4.基于背景技术存在刺激缺乏同步性,存在时间差,连接性差的技术问题,本发明提出了一种基于脑深部刺激电极同步刺激和记录控制系统。
5.本发明提出的一种基于脑深部刺激电极同步刺激和记录控制系统,包括刺激电极、记录模块、存储器、刺激开关、处理器和外壳,所述刺激电极、记录模块和处理器均与刺激开关双向电性连接,所述记录模块的输出端与存储器的输入端双向电性连接,所述外壳内部的顶端固定安装有电推杆,所述电推杆的输入端与刺激开关的输出端单向电性连接,所述电推杆的输出端焊接有滑杆,所述滑杆表面的右端滑动连接有滑套,所述滑套的后侧铰接有传动轮,所述传动轮的右侧啮合有传动机构,所述传动机构的内部传动连接有刺激机构,所述滑杆顶部的左端焊接有吸气机构,电推杆通过滑杆可以带动滑套转动,滑套通过传动轮可以带动传动机构转动,传动机构通过刺激机构可以对患者头部同步刺激,而且滑杆通过吸气机构可以在刺激机构内部产生负压,增强刺激机构的连接性,避免结构刺激电极出现脱落的情况。
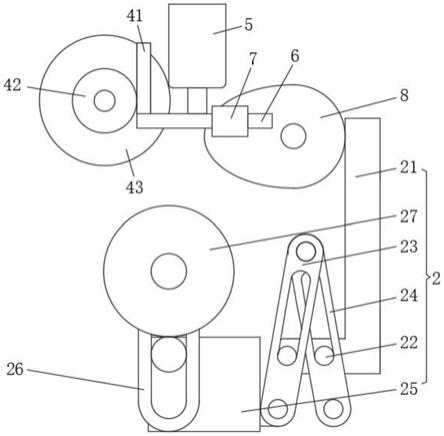
6.优选的,所述传动机构包括滑架、滑块、传动板、连接板、滑条、滑圈和主动轮,所述滑架的左侧与传动轮的右侧啮合,所述滑架的后侧与外壳的内部滑动连接,所述滑块的数量为两个,所述滑架前侧底部的两端分别与两个滑块的后侧焊接,所述传动板的顶端和连接板的顶端铰接,所述连接板的底端与外壳的内部铰接,所述传动板和连接板表面的孔洞分别与两个滑块的表面滑动连接,所述传动板的底端与滑条的右侧铰接,所述滑条的前侧与滑圈的内部滑动连接,所述滑圈的顶部与主动轮的底部焊接,所述主动轮的轴心处的与外壳的内部转动连接,所述主动轮与刺激机构传动连接,传动轮通过滑架可以带动滑块移动,滑块通过传动板和连接板可以带动滑条移动,滑条通过滑圈可以带动主动轮转动。
7.优选的,所述刺激机构包括传动带、活动轮、偏心轮、连接架和吸盘块,所述活动轮、偏心轮、连接架和吸盘块的数量均为两个,所述活动轮的后侧与偏心轮前侧的底部焊接,所述偏心轮轴心处的底部与外壳的内部转动连接,所述传动带设置在两个活动轮的内部之间,所述传动带的表面与主动轮的内部传动连接,所述偏心轮底部的滑槽与连接架的顶部滑动连接,所述连接架的底部与吸盘块顶部的凹槽粘合,所述吸盘块的表面与外壳底部的开口滑动连接,所述刺激电极的顶部与吸盘块底部的开口粘合,所述吸盘块与吸气机构连通,主动轮通过传动带可以带动活动轮转动,活动轮通过偏心轮可以带动连接架上下移动,连接架通过吸盘块可以带动刺激电极上下移动。
8.优选的,所述吸气机构包括齿条、小齿轮、被动轮、连接带、铰接轮、引导轮、铰接杆、塞杆和气罐,所述齿条的底部与滑杆顶部的左端焊接,所述齿条的左侧与小齿轮的右侧啮合,所述小齿轮的后侧与被动轮的前侧焊接,所述被动轮的轴心处与外壳的内部转动连接,所述被动轮的顶部与连接带的表面传动连接,所述铰接轮、引导轮、铰接杆、塞杆和气罐的数量均为两个,所述连接带设置在两个铰接轮的内部之间,所述铰接轮的轴心处与外壳的内部转动连接,所述引导轮的顶部与连接带的底部传动连接,所述引导轮的轴心处与外壳的内部转动连接,所述铰接杆的顶端与铰接轮的前侧铰接,所述铰接杆的底端与塞杆的顶部铰接,所述塞杆的底端延伸到气罐的内部并与气罐滑动设置,所述气罐与吸盘块连通,滑杆通过齿条可以带动小齿轮转动,小齿轮通过被动轮可以带动连接带转动,连接带通过引导轮可以带动铰接轮转动,铰接轮通过铰接杆可以带动塞杆移动,塞杆通过气罐可以对吸盘块进行吸气作业。
9.优选的,所述处理器的输出端与刺激开关的输入端双向电性连接,所述刺激电极的输入端与记录模块的输出端双向电性连接,所述刺激电极的输入端与刺激开关的输出端单向电性连接,处理器可以控制刺激开关的启闭,从而可以控制多个刺激电极的启闭,并通过记录模块和存储器对刺激电极的作业进行记录。
10.优选的,所述传动轮的轴心处与外壳的内部转动连接,所述传动轮的左侧为椭圆结构,传动轮被外壳转动限位,让传动轮可以平稳地转动,传动轮左侧的结构方便滑套带动传动轮上下转动。
11.优选的,所述连接板的顶端向左倾斜,所述传动板的顶端向右倾斜,传动板和连接板的倾斜结构方便滑架带动传动板和连接板转动,并且通过传动板和连接板的转动可以带动滑条左右移动。
12.优选的,所述滑条的底部与外壳内部的底端滑动连接,所述滑块位于滑圈的后侧,滑条通过滑轨与外壳滑动设置,让滑条可以平稳的左右移动,滑条和滑圈的结构方便滑条带动滑圈转动。
13.优选的,所述气罐的侧面与外壳的内部栓接,所述气罐的底部与外壳内部的底端相抵,对气罐的固定增强气罐的稳定性,避免塞杆在气罐的内部滑动过程中导致气罐晃动。
14.优选的,所述连接带位于电推杆的后侧,所述被动轮位于连接带的前侧,连接带和电推杆的结构可以避免转动的连接带碰撞到达电推杆,保障结构传动的顺畅。
15.本发明的有益效果是:电推杆通过滑杆可以带动滑套转动,滑套通过传动轮可以带动传动机构转动,传动机构通过刺激机构可以对患者头部同步刺激,而且滑杆通过吸气机构可以在刺激机构内部产生负压,增强刺激机构的连接性,避免结构刺激电极出现脱落
的情况。
附图说明
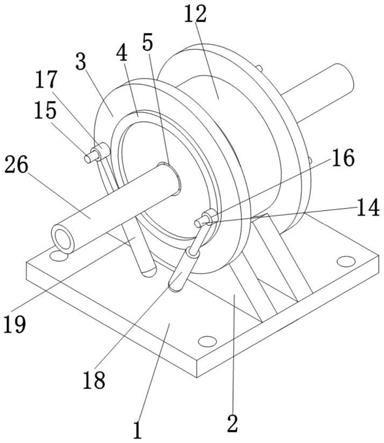
16.图1为本发明提出的一种基于脑深部刺激电极同步刺激和记录控制系统的正视结构示意图;
17.图2为本发明提出的一种基于脑深部刺激电极同步刺激和记录控制系统的传动轮结构示意图;
18.图3为本发明提出的一种基于脑深部刺激电极同步刺激和记录控制系统的主动轮结构示意图;
19.图4为本发明提出的一种基于脑深部刺激电极同步刺激和记录控制系统的电推杆立体示意图;
20.图5为本发明提出的一种基于脑深部刺激电极同步刺激和记录控制系统的齿圈立体示意图;
21.图6为本发明提出的一种基于脑深部刺激电极同步刺激和记录控制系统的系统框图。
22.图中:1、外壳;2、传动机构;21、滑架;22、滑块;23、传动板;24、连接板;25、滑条;26、滑圈;27、主动轮;3、刺激机构;31、传动带;32、活动轮;33、偏心轮;34、连接架;35、吸盘块;4、吸气机构;41、齿条;42、小齿轮;43、被动轮;44、连接带;45、铰接轮;46、引导轮;47、铰接杆;48、塞杆;49、气罐;5、电推杆;6、滑杆;7、滑套;8、传动轮;9、刺激电极;10、记录模块;11、存储器;12、刺激开关;13、处理器。
具体实施方式
23.下面结合具体实施例对本发明作进一步解说。
24.实施例
25.参考图1-6,本实施例中提出了一种基于脑深部刺激电极同步刺激和记录控制系统,包括刺激电极9、记录模块10、存储器11、刺激开关12、处理器13和外壳1,刺激电极9采用市面上成熟的电极产品,可以通过脉冲器和电极片等进行刺激,刺激电极9、记录模块10和处理器13均与刺激开关12双向电性连接,刺激开关12可以控制电源的启闭,从而控制刺激电极9、记录模块10和存储器11的启闭,记录模块10的输出端与存储器11的输入端双向电性连接,存储器11采用自动存储设备,自动对记录模块10检测记录到的信息进行存储,记录模块10可以用于检测心电图等信息,处理器13的输出端与刺激开关12的输入端双向电性连接,处理器13可以控制刺激开关12的启闭,刺激电极9的输入端与记录模块10的输出端双向电性连接,刺激电极9的输入端与刺激开关12的输出端单向电性连接,处理器13可以控制刺激开关12的启闭,从而可以控制多个刺激电极9的启闭,并通过记录模块10和存储器11对刺激电极9的作业进行记录,外壳1内部的顶端固定安装有电推杆5,电推杆5采用电动伸缩杆,电推杆5的输入端与刺激开关12的输出端单向电性连接,刺激开关12可以控制电推杆5的启闭,电推杆5的输出端焊接有滑杆6,滑杆6表面的右端滑动连接有滑套7,电推杆5可以带动滑杆6上下移动,滑杆6可以带动滑套7上下移动,滑套7在滑杆6的表面左右滑动,滑套7的后侧铰接有传动轮8,滑套7可以带动传动轮8转动,传动轮8的轴心处与外壳1的内部转动连
接,传动轮8的左侧为椭圆结构,传动轮8被外壳1转动限位,让传动轮8可以平稳地转动,传动轮8左侧的结构方便滑套7带动传动轮8上下转动,传动轮8的右侧啮合有传动机构2,传动轮8可以带动传动机构2转动,传动机构2的内部传动连接有刺激机构3,传动机构2可以带动刺激机构3转动,滑杆6顶部的左端焊接有吸气机构4,吸气机构4与刺激机构3连通,滑杆6可以带动吸气机构4转动,传动机构2包括滑架21、滑块22、传动板23、连接板24、滑条25、滑圈26和主动轮27,滑架21呈l型结构,滑架21的左侧与传动轮8的右侧啮合,传动轮8可以带动滑架21上下移动,滑架21的后侧与外壳1的内部滑动连接,滑架21通过滑轨与外壳1滑动设置,滑块22的数量为两个,滑架21前侧底部的两端分别与两个滑块22的后侧焊接,滑架21可以带动滑块22上下移动,传动板23的顶端和连接板24的顶端铰接,连接板24的底端与外壳1的内部铰接,传动板23和连接板24表面的孔洞分别与两个滑块22的表面滑动连接,滑块22可以带动传动板23和连接板24转动,连接板24的顶端向左倾斜,传动板23的顶端向右倾斜,传动板23和连接板24的倾斜结构方便滑架21带动传动板23和连接板24转动,并且通过传动板23和连接板24的转动可以带动滑条25左右移动,传动板23的底端与滑条25的右侧铰接,滑条25的前侧与滑圈26的内部滑动连接,传动板23可以带动滑条25左右移动,滑条25可以带动滑圈26转动,滑条25的底部与外壳1内部的底端滑动连接,滑块22位于滑圈26的后侧,滑条25通过滑轨与外壳1滑动设置,让滑条25可以平稳的左右移动,滑条25和滑圈26的结构方便滑条25带动滑圈26转动,滑圈26的顶部与主动轮27的底部焊接,滑圈26可以带动主动轮27转动,主动轮27的轴心处的与外壳1的内部转动连接,主动轮27与刺激机构3传动连接,传动轮8通过滑架21可以带动滑块22移动,滑块22通过传动板23和连接板24可以带动滑条25移动,滑条25通过滑圈26可以带动主动轮27转动,刺激机构3包括传动带31、活动轮32、偏心轮33、连接架34和吸盘块35,活动轮32、偏心轮33、连接架34和吸盘块35的数量均为两个,活动轮32的后侧与偏心轮33前侧的底部焊接,活动轮32可以带动偏心轮33转动,偏心轮33轴心处的底部与外壳1的内部转动连接,传动带31设置在两个活动轮32的内部之间,传动带31可以带动两个活动轮32转动,传动带31的表面与主动轮27的内部传动连接,主动轮27可以带动传动带31转动,偏心轮33底部的滑槽与连接架34的顶部滑动连接,偏心轮33可以带动连接架34上下移动,连接架34的底部与吸盘块35顶部的凹槽粘合,连接架34可以带动吸盘块35上下移动,吸盘块35的表面与外壳1底部的开口滑动连接,吸盘块35通过滑轨与外壳1滑动设置,刺激电极9的顶部与吸盘块35底部的开口粘合,吸盘块35与吸气机构4连通,主动轮27通过传动带31可以带动活动轮32转动,活动轮32通过偏心轮33可以带动连接架34上下移动,连接架34通过吸盘块35可以带动刺激电极9上下移动,吸气机构4包括齿条41、小齿轮42、被动轮43、连接带44、铰接轮45、引导轮46、铰接杆47、塞杆48和气罐49,齿条41的底部与滑杆6顶部的左端焊接,滑杆6可以带动齿条41上下移动,齿条41的左侧与小齿轮42的右侧啮合,齿条41可以带动小齿轮42转动,小齿轮42的后侧与被动轮43的前侧焊接,小齿轮42可以带动被动轮43转动,被动轮43的轴心处与外壳1的内部转动连接,被动轮43的顶部与连接带44的表面传动连接,被动轮43可以带动连接带44转动,铰接轮45、引导轮46、铰接杆47、塞杆48和气罐49的数量均为两个,连接带44设置在两个铰接轮45的内部之间,连接带44可以同步带动两个铰接轮45转动,连接带44位于电推杆5的后侧,被动轮43位于连接带44的前侧,连接带44和电推杆5的结构可以避免转动的连接带44碰撞到达电推杆5,保障结构传动的顺畅,铰接轮45的轴心处与外壳1的内部转动连接,引导轮46的顶部与连接带44的底部传
动连接,引导轮46对连接带44进行引导,引导轮46的轴心处与外壳1的内部转动连接,铰接杆47的顶端与铰接轮45的前侧铰接,铰接轮45可以带动铰接杆47上下移动,铰接杆47的底端与塞杆48的顶部铰接,铰接杆47可以带动塞杆48上下移动,塞杆48的底端延伸到气罐49的内部并与气罐49滑动设置,塞杆48在气罐49的内部滑动可以进行吸气作业,气罐49与吸盘块35连通,滑杆6通过齿条41可以带动小齿轮42转动,小齿轮42通过被动轮43可以带动连接带44转动,连接带44通过引导轮46可以带动铰接轮45转动,铰接轮45通过铰接杆47可以带动塞杆48移动,塞杆48通过气罐49可以对吸盘块35进行吸气作业,气罐49的侧面与外壳1的内部栓接,气罐49的底部与外壳1内部的底端相抵,对气罐49的固定增强气罐49的稳定性,避免塞杆48在气罐49的内部滑动过程中导致气罐49晃动,电推杆5通过滑杆6可以带动滑套7转动,滑套7通过传动轮8可以带动传动机构2转动,传动机构2通过刺激机构3可以对患者头部同步刺激,而且滑杆6通过吸气机构4可以在刺激机构3内部产生负压,增强刺激机构3的连接性,避免结构刺激电极9出现脱落的情况。
26.工作原理:需要刺激时,处理器13控制刺激开关12开启,刺激开关12接通刺激电极9、记录模块10、存储器11和电推杆5的电源,电推杆5带动滑杆6下移,滑杆6带动滑套7下移,滑套7带动传动轮8逆时针转动,传动轮8带动滑架21向上滑动,滑架21通过两个滑块22带动传动板23和连接板24转动,让传动板23和连接板24向外打开,传动板23带动滑条25向左滑动,滑条25带动滑圈26顺时针转动,滑圈26带动主动轮27顺时针转动,主动轮27带动传动带31顺时针转动,传动带31带动活动轮32顺时针转动,活动轮32带动偏心轮33顺时针转动,偏心轮33顶部的凸起部位向下转动,从而带动连接架34向下移动,连接架34带动吸盘块35下移,吸盘块35带动刺激电极9靠近刺激部位,与此同时,下移的滑杆6带动齿条41下移,齿条41带动小齿轮42顺时针转动,小齿轮42带动被动轮43顺时针转动,被动轮43带动连接带44转动,连接带44经过引导轮46的引导带动铰接轮45转动,铰接轮45带动铰接杆47向上移动,铰接杆47带动塞杆48向上移动,塞杆48在气罐49的内部滑动,并从吸盘块35的底部产生吸力,使得吸盘块35牢牢吸附在患者的头部,并且刺激电极9同步接触到患者的头部,同步进行刺激,记录模块10对刺激电极9的作业进行记录,存储器11对记录模块10的信息进行保存。
27.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。