1.本发明涉及墙壁抹灰机械技术领域,更具体的是涉及一种双轴抹灰机器人。
背景技术:
2.当需要对建筑物墙面抹水泥、刮腻子时,通常是先将水泥或者腻子喷涂在墙面上,然后通过抹灰机器人在固定在距离墙面一定的位置处,通过装有刮刀的升降装置带动刮刀进行垂直移动,从而将墙面抹平。
3.现有的墙壁抹灰机械在使用的时候,不能有效改变平台的角度位置,这样在使用的时候,机械臂容易出现变形的情况,从而会影响整体垂直度的问题。
技术实现要素:
4.本发明的目的在于:为了解决上述技术问题,本发明提供一种双轴抹灰机器人。
5.本发明为了实现上述目的具体采用以下技术方案:一种双轴抹灰机器人,包括平台底座和调节平台,所述调节平台安装固定在平台底座的上端位置上,所述调节平台的上方设置有角度感知器,所述平台底座的后端设置有后侧万向轮,所述平台底座的下端中间设置有中间调节轮,所述平台底座的前端两侧设置有前侧移动轮,所述调节平台的上端中间设置有金属机械臂,所述金属机械臂的前端位于两个前侧移动轮之间设置有金属机架,所述金属机架的前端设置有前侧限位架,所述金属机架的后端内侧设置有减速电机,所述减速电机的输出轴外端设置有钢丝收卷盘,所述钢丝收卷盘的周侧设置有拉扯钢丝,所述金属机架的上端设置有顶部限位轮,所述前侧限位架的上端中间设置有顶部定轮,所述顶部定轮的外侧位于前侧限位架上设置有侧边气弹簧,所述前侧限位架的前端套接设置有抹灰刮刀,所述拉扯钢丝穿过顶部限位轮和顶部定轮和抹灰刮刀相连接,所述调节平台的周侧位于平台底座上设置有箱体外壳,所述箱体外壳的上端设置有控制面板。
6.通过上述步骤,因箱体外壳上端的控制面板,从而便于控制使用,因调节平台上端的金属机械臂,从而便于支撑前侧限位架和金属机架,这样便于稳定放置使用,抹灰时,因金属机架后端内侧的钢丝收卷盘,从而钢丝收卷盘因外端的减速电机便于转动收卷使用,这样便于缠绕拉扯拉扯钢丝,使得拉扯钢丝拉动抹灰刮刀在前侧限位架上进行抹灰移动,因拉扯钢丝穿过顶部限位轮和顶部定轮和抹灰刮刀相连接,从而拉扯钢丝在拉扯的时候更加稳定便利,这样便于抹灰进行使用。
7.进一步的:所述调节平台的两侧位于箱体外壳上设置有倒置电动缸,且所述倒置电动缸呈对称状态。
8.通过上述步骤,因两个倒置电动缸的倒置安装,这样有效减轻金属机械臂的下端支撑,并且使得调节平台的安装位置与平台底座更接近,这样金属机械臂的位置也下降到了最低,这样当抹灰刮刀对刀时,金属机械臂下端受力,从而可以避免金属机械臂的变形,有效确保垂直度。
9.进一步的:所述后侧万向轮的两个轮子通过十字轴与轮架相连,轮子可左右灵活
倾斜5
°
。
10.通过上述步骤,因后侧万向轮的两个轮子通过十字轴与轮架相连,轮子可左右灵活倾斜5
°
,这样当地面不平时可保证两个轮子都能接触地面,从而保证底盘的平衡,并且在转向时,后侧万向轮的转动方向是互相反向的,可以使机器不用有较大的幅度调整转向,而就地灵活的改变方向。
11.进一步的:所述金属机架和钢丝收卷盘通过螺钉固定连接,且所述金属机架和钢丝收卷盘的连接处外侧处于同一直线上。
12.通过上述步骤,因金属机架和钢丝收卷盘通过螺钉固定连接,这样钢丝收卷盘便于安装拆卸更换使用,而且金属机架和钢丝收卷盘的连接处外侧处于同一直线上,从而在使用的时候不会发生阻碍。
13.进一步的:所述调节平台和平台底座通过电动缸和万向轴相连接。
14.通过上述步骤,因调节平台和平台底座通过电动缸和万向轴相连接,这样因调节平台的电动缸便于调整整体的角度,而且调节平台因万向轴的固定,从而调节平台在调节的时候更加稳定,并且调节平台在改变时,这样有效被角度感知器所感知,从而因控制面板的指令控制,使得调节平台的电动缸运动,这样有效控制调节平台的x轴及y轴的姿态,进而保证金属机械臂的垂直状态,使得金属机械臂外端的前侧限位架和金属机架便于稳定放置,这样抹灰刮刀可以有效保持水平姿态。
15.进一步的:所述金属机械臂位于调节平台的上端中间,且所述金属机械臂的两端呈对称状态。
16.通过上述步骤,金属机械臂在支撑时,因金属机械臂位于调节平台的上端中间,并且金属机械臂的两端呈对称状态,从而金属机械臂便于稳定支撑使用,使得金属机械臂支撑更加稳定。
17.本发明的有益效果如下:
18.1:因两个倒置电动缸的倒置安装,这样有效减轻金属机械臂的下端支撑,并且使得调节平台的安装位置与平台底座更接近,这样金属机械臂的位置也下降到了最低,这样当抹灰刮刀对刀时,金属机械臂下端受力,从而可以避免金属机械臂的变形,有效确保垂直度。
19.2:因调节平台和平台底座通过电动缸和万向轴相连接,这样因调节平台的电动缸便于调整整体的角度,而且调节平台因万向轴的固定,从而调节平台在调节的时候更加稳定,并且调节平台在改变时,这样有效被角度感知器所感知,从而因控制面板的指令控制,使得调节平台的电动缸运动,这样有效控制调节平台的x轴及y轴的姿态,进而保证金属机械臂的垂直状态,使得金属机械臂外端的前侧限位架和金属机架便于稳定放置,这样抹灰刮刀可以有效保持水平姿态。
20.3:因后侧万向轮的两个轮子通过十字轴与轮架相连,轮子可左右灵活倾斜5
°
,这样当地面不平时可保证两个轮子都能接触地面,从而保证底盘的平衡,并且在转向时,后侧万向轮的转动方向是互相反向的,可以使机器不用有较大的幅度调整转向,而就地灵活的改变方向。
附图说明
21.图1是本发明中的后侧立体结构示意图;
22.图2是本发明中的前侧立体结构示意图;
23.图3是本发明中的侧边平面结构示意图;
24.图4是本发明中的底部剖面结构示意图;
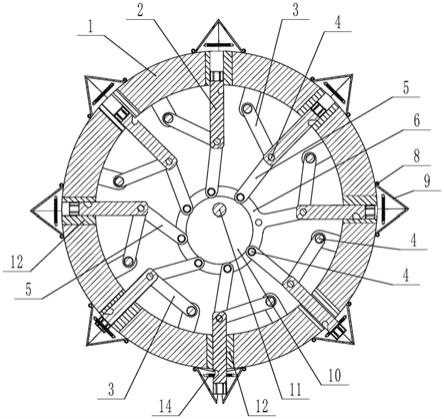
25.图5是本发明中的正面剖面结构示意图。
26.附图标记:11、顶部限位轮;12、拉扯钢丝;13、金属机械臂;14、减速电机;15、控制面板;16、箱体外壳;17、平台底座;18、侧边气弹簧;19、金属机架;20、前侧限位架;21、钢丝收卷盘;22、前侧移动轮;23、抹灰刮刀;24、中间调节轮;25、顶部定轮;27、后侧万向轮;28、倒置电动缸;29、调节平台;30、角度感知器。
具体实施方式
27.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
28.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.实施例1
30.如图1-图5所示,本实施例提供一种双轴抹灰机器人,包括平台底座17和调节平台29,调节平台29安装固定在平台底座17的上端位置上,调节平台29的上方设置有角度感知器30,平台底座17的后端设置有后侧万向轮27,平台底座17的下端中间设置有中间调节轮24,平台底座17的前端两侧设置有前侧移动轮22,调节平台29的上端中间设置有金属机械臂13,金属机械臂13的前端位于两个前侧移动轮22之间设置有金属机架19,金属机架19的前端设置有前侧限位架20,金属机架19的后端内侧设置有减速电机14,减速电机14的输出轴外端设置有钢丝收卷盘21,钢丝收卷盘21的周侧设置有拉扯钢丝12,金属机架19的上端设置有顶部限位轮11,前侧限位架20的上端中间设置有顶部定轮25,顶部定轮25的外侧位于前侧限位架20上设置有侧边气弹簧18,前侧限位架20的前端套接设置有抹灰刮刀23,拉扯钢丝12穿过顶部限位轮11和顶部定轮25和抹灰刮刀23相连接,调节平台29的周侧位于平台底座17上设置有箱体外壳16,箱体外壳16的上端设置有控制面板15。
31.在实施例中,使用时,平台底座17因下端的中间调节轮24、前侧移动轮22和后侧万向轮27,从而便于稳定放置和移动使用,因箱体外壳16的包裹,从而有效防护调节平台29和ck150t型号的角度感知器30,因箱体外壳16上端的控制面板15,从而便于控制使用,因调节平台29上端的金属机械臂13,从而便于支撑前侧限位架20和金属机架19,这样便于稳定放置使用,抹灰时,因金属机架19后端内侧的钢丝收卷盘21,从而钢丝收卷盘21因外端的减速电机14便于转动收卷使用,这样便于缠绕拉扯拉扯钢丝12,使得拉扯钢丝12拉动抹灰刮刀23在前侧限位架20上进行抹灰移动,因拉扯钢丝12穿过顶部限位轮11和顶部定轮25和抹灰
刮刀23相连接,从而拉扯钢丝12在拉扯的时候更加稳定便利,这样便于抹灰进行使用。
32.实施例2
33.如图1、图2、图4和图5所示,调节平台29的两侧位于箱体外壳16上设置有倒置电动缸28,且倒置电动缸28呈对称状态,因两个倒置电动缸28的倒置安装,这样有效减轻金属机械臂13的下端支撑,并且使得调节平台29的安装位置与平台底座17更接近,这样金属机械臂13的位置也下降到了最低,这样当抹灰刮刀23对刀时,金属机械臂13下端受力,从而可以避免金属机械臂13的变形,有效确保垂直度。
34.其中,调节平台29和平台底座17通过电动缸和万向轴相连接。
35.在实施例中,使用时,因调节平台29和平台底座17通过电动缸和万向轴相连接,这样因调节平台29的电动缸便于调整整体的角度,而且调节平台29因万向轴的固定,从而调节平台29在调节的时候更加稳定,并且调节平台29在改变时,这样有效被角度感知器30所感知,从而因控制面板15的指令控制,使得调节平台29的电动缸运动,这样有效控制调节平台29的x轴及y轴的姿态,进而保证金属机械臂13的垂直状态,使得金属机械臂13外端的前侧限位架20和金属机架19便于稳定放置,这样抹灰刮刀23可以有效保持水平姿态。
36.实施例3
37.如图1、图2和图3所示,金属机械臂13位于调节平台29的上端中间,且金属机械臂13的两端呈对称状态。
38.其中,金属机架19和钢丝收卷盘21通过螺钉固定连接,且金属机架19和钢丝收卷盘21的连接处外侧处于同一直线上。
39.其中,后侧万向轮27的两个轮子通过十字轴与轮架相连,轮子可左右灵活倾斜5
°
。
40.在实施例中,使用时,因金属机架19和钢丝收卷盘21通过螺钉固定连接,这样钢丝收卷盘21便于安装拆卸更换使用,而且金属机架19和钢丝收卷盘21的连接处外侧处于同一直线上,从而在使用的时候不会发生阻碍,金属机械臂13在支撑时,因金属机械臂13位于调节平台29的上端中间,并且金属机械臂13的两端呈对称状态,从而金属机械臂13便于稳定支撑使用,使得金属机械臂13支撑更加稳定,因后侧万向轮27的两个轮子通过十字轴与轮架相连,轮子可左右灵活倾斜5
°
,这样当地面不平时可保证两个轮子都能接触地面,从而保证底盘的平衡,并且在转向时,后侧万向轮27的转动方向是互相反向的,可以使机器不用有较大的幅度调整转向,而就地灵活的改变方向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。