技术特征:
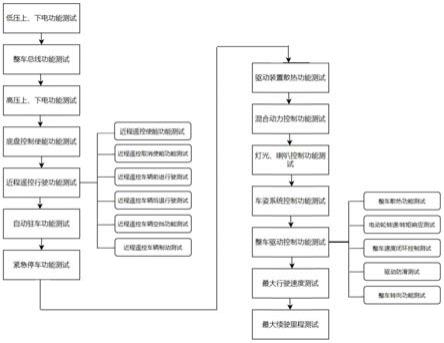
1.轮毂电驱动混合动力无人车台架试验方法,其特征在于:无人车装车完成后,将其固定在转鼓试验台上进行测试,测试流程为:步骤一:低压上、下电功能测试;步骤二:整车总线功能测试;步骤三:高压上、下电功能测试;步骤四:底盘控制使能功能测试;步骤五:近程遥控行驶功能测试;步骤六:自动驻车功能测试;步骤七:紧急停车功能测试;步骤八:驱动装置散热控制功能测试;步骤九:混合动力控制功能测试;步骤十:灯光、喇叭控制功能测试;步骤十一:车姿系统控制功能测试;步骤十二:整车驱动控制功能测试;步骤十三:无人车最大行驶速度测试;步骤十四:无人车最大续驶里程测试。2.根据权利要求1所述的轮毂电驱动混合动力无人车台架试验方法,其特征在于,所述步骤十二中,整车驱动控制功能测试流程为:1201:整车散热功能测试;1202:电动轮转速/转矩响应测试;1203:整车速度闭环控制调试与测试;1204:驱动防滑测试;1205:整车转向功能测试。3.根据权利要求2所述的轮毂电驱动混合动力无人车台架试验方法,其特征在于,所述整车散热功能测试方法为:近程遥控锁定,车辆进入近程遥控模式后,设定车辆限速值,设定电机转速模式,设定转鼓试验台道路阻力模式;正常加载,使用近程遥控器挂前进挡,推近程遥控器油门摇杆到最大,观察底盘管控界面车速是否为设定的车辆限速值,在确认无人车水泵和散热风扇都正常工作后,保持车辆前进行驶设定时间,同时观察车辆底盘各分系统控制器温度上升情况并进行记录;若出现接近控制器所能承受的最高温度,停止试验,查找整车散热系统布置结构图中对应节点。4.根据权利要求2所述的轮毂电驱动混合动力无人车台架试验方法,其特征在于,所述电动轮转速/转矩响应测试方法为:运行整车驱动控制模块,给每个电动轮发送不同的转速/转矩命令,记录测试参数,由此分析电动轮转速/转矩响应品质,所述测试参数包括:电动轮转速/转矩闭环响应上升时间、调节时间、最大超调量、稳态误差。5.根据权利要求2所述的轮毂电驱动混合动力无人车台架试验方法,其特征在于,所述整车速度闭环控制调试与测试方法为:运行整车驱动控制模块,设定电机转矩模式,设定转鼓试验台道路阻力模式,正常加
载;给整车发送不同的车速命令,首先设定pid控制器比例参数,按给定偏差计算初始值,然后通过从中间到两侧的调整参数的方法逐步调节比例参数,直到所计算的车速跟踪阶跃响应响应速度大于设定速度值、超调量小于设定值、调节时间小于设定值;然后从0开始根据设定的pid控制器比例参数对应的稳态误差值估算出的积分参数进行调试,然后通过从中间到两侧的调整参数的方法逐步调节比例参数,直到所计算的车速跟踪阶跃响应响应速度大于设定速度值、超调量小于设定值、调节时间小于设定值;然后从0开始逐步增加微分参数的值,调节车速跟踪曲线到设定指标;计算通过轮速与车速关系通过轮速估计实时车速,记录测试参数并分析车速响应品质,所述测试参数包括:车速闭环响应上升时间、调节时间、最大超调量、稳态误差。6.根据权利要求2所述的轮毂电驱动混合动力无人车台架试验方法,其特征在于,所述驱动防滑测试方法为:运行整车驱动控制模块,设定电机转矩模式,给整车发送不同的车速命令,设定转鼓试验台道路阻力模式,通过取消每个轮鼓的扭矩加载,观察对应车轮轮速与其它车轮轮速的差值;然后同时取消两个轮鼓的扭矩加载,观察对应车轮轮速与其它车轮轮速的差值。7.根据权利要求2所述的轮毂电驱动混合动力无人车台架试验方法,其特征在于,所述整车转向功能测试方法为:运行整车驱动控制模块,近程遥控锁定,车辆进入近程遥控模式后,在底盘管控程序中设定车辆限速值,设定电机转速模式,关闭转鼓试验台,使得各转鼓处于自由状态,使用近程遥控器挂前进挡,缓推近程遥控器油门摇杆,同时向左把转向达到最大,观察无人车各驱动轮的转速,确认左侧驱动轮的转速是否低于右侧驱动轮的转速;设定电机转矩模式,关闭转鼓试验台,使得各转鼓处于自由状态,使用近程遥控器挂前进挡,缓推近程遥控器油门摇杆,同时向左把转向达到最大,观察无人车各驱动轮的转速,确认左侧驱动轮的转速是否低于右侧驱动轮的转速;然后恢复车辆到静止状态,设定电机转速模式,使用近程遥控器挂前进挡,缓推近程遥控器油门摇杆,同时向右把转向达到最大,观察无人车各驱动轮的转速,确认左侧驱动轮的转速是否高于右侧驱动轮的转速;设定电机转矩模式,使用近程遥控器挂前进挡,缓推近程遥控器油门摇杆,同时向右把转向达到最大,观察无人车各驱动轮的转速,确认左侧驱动轮的转速是否高于右侧驱动轮的转速。8.根据权利要求1或2所述的轮毂电驱动混合动力无人车台架试验方法,其特征在于,还包括异常状态安全控制功能测试,测试流程为:步骤十五:近程遥控有关的异常状态安全控制功能测试:测试内容为:在近程遥控驾驶模式下机动行驶时,当近程遥控器无线信号受到干扰中断时,无人车是否能自动紧急停车;在远程操控/自主驾驶模式下机动行驶时,当近程遥控器无线信号中断时,无人车是否不自动紧急停车;当近程遥控器接收机不在线时,无人车是否能自动紧急停车;在远程操控/自主驾驶模式下,当近程遥控器接收机不在线时,无人车是否不自动紧急停车;步骤十六:制动控制系统有关的异常状态安全控制功能测试;测试内容为:
在近程遥控、远程操控、自主驾驶模式机动行驶时,当制动控制器总线不在线时,无人车是否能自动紧急停车;当制动控制器上报蓄能器和制动传感器故障时,无人车是否能自动紧急停车;当蓄能器压力低于设定阈值时,无人车是否能自动紧急停车;步骤十七:bms电源管理系统有关的异常状态安全控制功能测试;测试内容为:在近程遥控、远程操控、自主驾驶模式机动行驶时,当bms不在线时,无人车是否能自动紧急停车;当bms上报1级故障时,无人车是否能自动紧急停车;当bms上报总电压过充、总电压过放、单体电压过充、单体电压过放、最高温度过高、最低温度过低为1级报警时,无人车是否能自动紧急停车;步骤十八:驱动电机有关的异常状态安全控制功能测试;测试内容为:在近程遥控、远程操控、自主驾驶模式机动行驶时,驱动电机控制器总线不在线时,无人车是否能自动紧急停车;当驱动电机上报1级故障时,无人车是否能自动紧急停车;步骤十九:底盘控制有关的异常状态安全控制功能测试,测试内容为:当制动控制器收不到底盘控制指令时,无人车是否能自动紧急停车并驻车,且制动控制器的判断时间是否超过设定时间;当电机控制器收不到底盘控制指令时,是否能立即取消驱动;在近程遥控模式下,底盘控制器收不到近程遥控指令时,无人车是否能自动紧急停车;在远程遥控、自主驾驶模式下,底盘控制器收不到远程操控、自主指令时是否能立即停车,且判断时间是否超过设定时间。
技术总结
本发明提供一种轮毂电驱动混合动力无人车台架试验方法,通过对轮毂电驱动混合动力无人车的整车台架试验流程进行设计,能够有效指导轮毂电驱动混合动力无人车的台架试验,加快新车调试进度。该台架试验方法用于在轮毂电驱动混合动力无人车装车完成后,对无人车依次进行如下测试:低压上、下电功能测试;整车总线功能测试;高压上、下电功能测试;底盘控制使能功能测试;近程遥控行驶功能测试;自动驻车功能测试;紧急停车功能测试;驱动装置散热控制功能测试;混合动力控制功能测试;灯光、喇叭控制功能测试;车姿系统控制功能测试;整车驱动控制功能测试;无人车最大行驶速度测试;无人车最大续驶里程测试。最大续驶里程测试。最大续驶里程测试。
技术研发人员:李胜飞 汪洋 于华超 程文 赵熙俊 崔星 高天云 苏波
受保护的技术使用者:中国北方车辆研究所
技术研发日:2021.11.15
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。