1.本发明涉及雷达测距技术领域,具体为一种扫描式激光雷达测距装置。
背景技术:
2.激光测距是以激光器作为光源进行测距,激光雷达中的激光器发射出一束激光脉冲,激光投射到物体上后发生漫反射,部分能量返回,激光接收器接到收漫反射光,通过激光光束在空中的飞行时间,准确计算得出目标物体到传感器间的距离。
3.激光测距仪由于激光的单色性好、方向性强等特点,加上电子线路半导体化集成化,与光电测距仪相比,不仅可以日夜作业、而且能提高测距精度,但是现在的测距装置在测量距离的时候需要辅助装置配合工作,需要将辅助装置放置在水面或水下,水面或水下的辅助装置长时间与水接触,容易出现损坏,而且在水流湍急或大风天气的影响下会使辅助装置丢失,故而提出一种扫描式激光雷达测距装置来解决上述所提出的问题。
技术实现要素:
4.针对现有技术的不足,本发明提供了一种扫描式激光雷达测距装置,具备能够独立扫描测距的优点,解决了其他测距装置在测量距离的时候需要辅助装置配合工作,需要将辅助装置放置在水面或水下,水面或水下的辅助装置长时间与水接触,容易出现损坏,而且在水流湍急或大风天气的影响下会使辅助装置丢失的问题。
5.为实现上述能够独立扫描测距的目的,本发明提供如下技术方案:
6.一种扫描式激光雷达测距装置,包括安装板,所述安装板的顶部固定连接有两个支撑板,两个所述支撑板的内部均与传动杆的外部活动连接,所述传动杆两端的外部均固定连接有转动臂,两个所述转动臂远离传动杆一端的内侧均固定连接有螺纹套筒,两个所述转动臂远离传动杆一端的外侧均固定连接有固定螺丝,所述传动杆的外部固定连接有支撑板,所述支撑板的顶部固定连接有固定架,所述固定架的顶部固定连接有支撑架,所述支撑架的顶部固定安装有供电组件,所述支撑架的底部固定安装有数据处理单元,所述安装板的顶部固定连接有位于支撑板左侧的托架,所述托架的正面和背面均固定连接有拖环,所述固定架的内部固定连接有固定套筒,所述固定套筒的内部和活动杆的右端活动连接,所述活动杆远离固定套筒一端的外侧卡接有安装片,所述活动杆远离固定套筒一端的顶部固定连接有位于安装片顶部的固定片,所述安装片的正面固定安装有雷达。
7.作为本发明再进一步的方案:两个所述转动臂和传动杆构成c状,转动臂和螺纹套筒连通。
8.作为本发明再进一步的方案:所述固定螺丝的一端贯穿转动臂和螺纹套筒并延伸至拖环的内部,所述支撑板位于两个支撑板的相对一侧。
9.作为本发明再进一步的方案:所述支撑架包括安装架和两个连接板,两个连接板左右分布在安装架的底部,支撑架和固定架为一个整体。
10.作为本发明再进一步的方案:所述托架包括放置架和两个支撑杆,两个支撑杆前
后对称分布在放置架和安装板的相对一侧。
11.作为本发明再进一步的方案:所述拖环和托架为一个整体,拖环的外侧开设有弧形卡槽,弧形卡槽和固定螺丝远离转动臂的一端卡接。
12.作为本发明再进一步的方案:所述固定套筒左端的底部固定连接有两个套环,固定套筒的内部开设有活动槽,活动槽的内侧和活动杆右端外部接触。
13.作为本发明再进一步的方案:所述雷达包括固定连接在安装片正面的保护外壳,所述保护外壳的内腔后侧壁固定安装有驱动马达,所述驱动马达的驱动轴外部固定安装有转盘,所述转盘的外侧等距离设置有滚珠,所述转盘的正面固定安装有激光组件,所述激光组件的外侧固定安装有数据传输单元。
14.作为本发明再进一步的方案:所述转盘的外侧等距离开设有多个限位槽,限位槽的内侧和滚珠接触,所述驱动马达、激光组件、数据传输单元、数据处理单元和供电组件电连接,所述激光组件包括激光发射器和激光接收器。
15.与现有技术相比,本发明提供了一种扫描式激光雷达测距装置,具备以下有益效果:
16.1、该扫描式激光雷达测距装置,通过将测距设备安装在岸边或者桥上,不需要额外将辅助装置放置在水面或者水下,维护简单,避免测距设备长期在水中影响设备使用寿命,而且能够防止测距设备丢失,本测距设备依靠的是岸的反射,然后分析得到水和岸的分界线,所以量程轻松能到100m,利用先进的算法,能做到一秒测量五次水位数据,采集快,而且在有风浪或者水面有垃圾、杂草等时,依然能工作,而且采用太阳能对锂电池进行持续供电,保证雷达的使用状态。
17.2、该扫描式激光雷达测距装置,通过缩放活动杆对雷达的横向位置进行调节,使雷达能够根据岸边的倾斜度和长度进行变化,而且能够不用拆卸安装结构就可以回缩活动杆对雷达进行维护和检测,活动杆位于水面上,采用旋转的方式对雷达位置设置,不用下水调节活动杆长度,能够在岸边完成调节,方便雷达进行定位,提高雷达的检测准确性。
附图说明
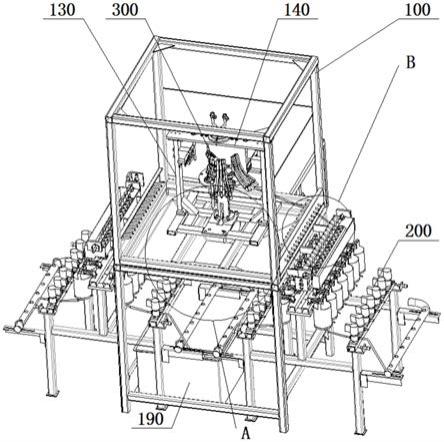
18.图1为本发明结构主视图;
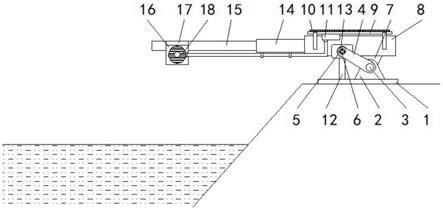
19.图2为本发明结构雷达侧视剖视图;
20.图3为本发明结构数据处理单元示意图。
21.图中:1安装板、2支撑板、3传动杆、4转动臂、5螺纹套筒、6固定螺丝、7支撑板、8固定架、9支撑架、10供电组件、11数据处理单元、12托架、13拖环、14固定套筒、15活动杆、16安装片、17固定片、18雷达、181保护外壳、182驱动马达、183转盘、184滚珠、184滚珠、185激光组件、186数据传输单元。
具体实施方式
22.以下结合附图对本发明的优选实施例进行说明,应当理解,并不用于限定本发明。
23.需要说明的是,这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
24.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
25.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
26.请参阅图1-3,一种扫描式激光雷达测距装置,包括安装板1,安装板1的顶部固定连接有两个支撑板2,两个支撑板2的内部均与传动杆3的外部活动连接,传动杆3两端的外部均固定连接有转动臂4,两个转动臂4远离传动杆3一端的内侧均固定连接有螺纹套筒5,两个转动臂4远离传动杆3一端的外侧均固定连接有固定螺丝6,固定螺丝6的一端贯穿转动臂4和螺纹套筒5并延伸至拖环13的内部,传动杆3的外部固定连接有支撑板7,支撑板7位于两个支撑板2的相对一侧,支撑板7的顶部固定连接有固定架8,固定架8的顶部固定连接有支撑架9,支撑架9包括安装架和两个连接板,两个连接板左右分布在安装架的底部,支撑架9和固定架8为一个整体,支撑架9的顶部固定安装有供电组件10,供电组件10包括太阳能板组件和锂电池,支撑架9的底部固定安装有数据处理单元11,安装板1的顶部固定连接有位于支撑板2左侧的托架12,托架12包括放置架和两个支撑杆,两个支撑杆前后对称分布在放置架和安装板1的相对一侧,托架12的正面和背面均固定连接有拖环13,拖环13和托架12为一个整体,拖环13的外侧开设有弧形卡槽,弧形卡槽和固定螺丝6远离转动臂4的一端卡接,固定架8的内部固定连接有固定套筒14,固定套筒14左端的底部固定连接有两个套环,固定套筒14的内部开设有活动槽,活动槽的内侧和活动杆15右端外部接触,固定套筒14的内部和活动杆15的右端活动连接,活动杆15远离固定套筒14一端的外侧卡接有安装片16,活动杆15远离固定套筒14一端的顶部固定连接有位于安装片16顶部的固定片17,安装片16的正面固定安装有雷达18,雷达18和数据处理单元11通过网线通信连接,雷达18包括固定连接在安装片16正面的保护外壳181,保护外壳181的内腔后侧壁固定安装有驱动马达182,驱动马达182的驱动轴外部固定安装有转盘183,转盘183的外侧等距离设置有滚珠184,转盘183的正面固定安装有激光组件185,激光组件185包括激光发射器和激光接收器,激光组件185的外侧固定安装有数据传输单元186,转盘183的外侧等距离开设有多个限位槽,限位槽的内侧和滚珠184接触,驱动马达182、激光组件185、数据传输单元186、数据处理单元11和供电组件10电连接,从而达到了能够独立扫描测距的目的。
27.本发明的工作原理是:旋转转动臂4带动传动杆3外部的支撑板7和固定架8同时旋转,使固定套筒14与地面垂直,向外抽出活动杆15使雷达18移动至合适测距位置,操作数据处理单元11启动激光组件185,激光组件185内的激光发射器发出激光向外投射,激光接触到水岸后反射,激光接收器接收到反射激光,激光接触到水时激光不会反射,驱动马达182带动转盘183在保护外壳181的内部旋转,激光组件185可以360
°
旋转,激光组件185旋转一周4000个点,激光组件185一共有16线,最多能找到16个水岸分界点,然后将这几个水岸分界点的垂直高度合成,最终输出一个垂直高度,即激光组件185旋转一周,可以得到一个16*
4000大小的全景画,这个叫一帧,激光组件185持续旋转,转速为5hz,即成像是一秒五帧,在多帧的情况下,会有一个类似超分辨率成像的效果,得到一幅三维的点云信息,激光组件185采集的点云信息通过网线送到数据处理单元11,数据处理单元11对激光组件185测量的数据进行滤波,去抖等,使得点云信息更加清晰稳定,切割点云寻找水和岸的分界点,只有水岸才会有反射,水没有反射,设备使用太阳能加上锂电池供电,可以实现自给自足,无需人工充电,后期会使用人工智能(深度学习),使得对水岸切割,高度计算更精确,以及能适应更多场景,如小雨、大风和小雪等,
28.从而解决了现在的激光雷达在测量距离的时候需要辅助装置配合工作,需要将辅助装置放置在水面或水下,水面或水下的辅助装置长时间与水接触,容易出现损坏,而且在水流湍急或大风天气的影响下会使辅助装置丢失的问题。
29.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
30.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。