1.本发明涉及气动光学研究领域,具体地,涉及一种波前特性分析方法及系统。
背景技术:
2.飞机或导弹流场高度非均匀和高频脉动,当光束在这种流场中传输时,波前会发生畸变,引起光束质量退化,这称为气动光学效应。气动光学效应对光电探测系统或空基激光定向能武器系统性能会造成严重干扰,因此,气动光学效应或波前的特性研究是一项重点研究内容,通过对波前特性的分析,评估气动光学效应的主要相差和统计特征等,据此有针对性地发展流动控制技术、自适应光学ao校正技术等,用于抑制气动光学效应影响。
3.对于时间变化序列波前特性研究,pod本征正交分解方法具有自身的独特优势。pod本征正交分解方法在波前数据分析中应用广泛,它能够从上万帧时间序列变化波前数据中找到波前主要模态,并用前少数几阶模态就基本复原波前的复杂波面形状,比较适合于波前的主要特征以及占主导作用的相差分析。pod本征正交分解方法的这些优势有助于流动控制技术、自适应光学ao校正技术等的研制,从而在气动光学效应的抑制领域发挥独特作用。
4.在传统的波前模态pod本征正交分解中,有直接法和“散斑照相”法,它们均是基于波前本身的分解方法。对于直接法,波前空间离散点数为m,则需要求解m
×
m阶矩阵的特征值和特征向量,以1024
×
1024像素的波前采样为例,需要求解1048576
×
1048576阶矩阵的特征值和特征向量,这对计算机硬件内存占用量和计算量均是巨大挑战,难于甚至基本无法操作实现。sirovich由此提出“散斑照相”法,采用约200帧的散斑抽样,由此只需要求解200
×
200阶矩阵的特征值和特征向量,使计算量和内存占用花销大为降低,也让波前模态的pod本征正交分解具有实际可操作性。但是,“散斑照相”法采用约200帧的波前抽样,对于高速变化的时间序列波前,当采用不同的帧频速度,200帧波前数据就会位于时间序列波前的不同位置,对于周期性变化的时间序列波前,可能小于一个周期,或者分布在一个或多个周期上,必然导致pod本征正交分解获取的波前模态是不同的,同时约200帧的有限抽样也无法充分反映波前变化的时间统计特性。
技术实现要素:
5.本发明的目的正是为了解决pod本征正交分解直接法难于用于波前空间离散点数太多的波前模态分解以及“散斑照相”法的有限采样帧频无法充分反映时间变化序列波前的统计特性等问题。
6.为实现上述目的,本发明提供了一种波前特性分析方法,所述方法包括:
7.步骤1:获取基于时间序列的第一波前wn(x,y),n=1,2,
…
,n,其中,n为采样帧频总数,x和y分别为横坐标和纵坐标;
8.步骤2:基于泽尼克多项式和第一泽尼克多项式加权系数cn(k)构建所述wn(x,y)的第一波前表达式,求解所述第一波前表达式获得基于时间序列的所述cn(k),k=1,2,
…
,k,
k为所述泽尼克多项式的阶数;
9.步骤3:构建所述cn(k)的实对称正定空间关联矩阵r,计算所述r的k个特征值λ
p
,以及所述λ
p
对应特征向量p=1,2,
…
,k;所述cn(k)在所述上的加权系数为dn(p),基于所述得到第二泽尼克多项式加权系数
10.其中,
11.步骤4:基于泽尼克多项式和所述第二泽尼克多项式加权系数构建第二波前的第二波前表达式;
12.步骤5:基于所述第二波前表达式获得第二波前数据,基于所述第二波前数据进行波前特性分析。
13.其中,本发明通过引入基于zernike多项式的波前重构环节,对时间序列的zernike多项式加权系数而非波前本身进行pod本征正交直接分解。设k是zernike多项式的阶数(通常取k=128),则只需要求解128
×
128阶矩阵的特征值和特征向量,计算量和内存占用量由此大为降低。本发明能够用于上万帧、高像素时间序列波前的pod本征正交分解,因此,本发明能够保证波前pod本征正交分解具备足够的空间分辨率和时间统计特性,便于进行后续的波前特性分析。
14.优选的,所述步骤1具体包括:
15.获得基于时间序列的原始波前;
16.去除所述原始波前的倾斜相差获得所述基于时间序列的第一波前wn(x,y)。
17.其中,波前通常含有较大成分的倾斜相差,这部分倾斜相差会弱化波前高阶相差的分布以及在时间上的变化情况。通过去除所述原始波前的倾斜相差可以消除上述不利影响。
18.优选的,第tn时刻的第一波前wn(x,y)的倾斜相差为anx bny,其中,an和bn分别为x向和y向倾斜因子,利用最小二乘法计算倾斜因子an和bn,并把倾斜相差anx bny从第tn时刻的波前wn(x,y)中扣除。
19.优选的,采用以下公式计算倾斜因子an和bn:
[0020][0021][0022]
其中,其中,和分别为相应微分算子。
[0023]
优选的,所述第一波前表达式为:第一波前在空间上的离散点数为m,将所述第一波前表达式转为第一矩阵表达式:w=zc,w是由wn(x,y)组成的列向量,维数为m,z是由泽尼克多项式组成的矩阵,维数k
×
m,c是由cn(k)组成的列向量,维数为k;利用最小二乘法计算获得所述第一矩阵表达式的最小范数解得到在tn时刻wn(x,y)的第一泽尼克多项式加权系数cn(k),其中,c=(z
t
z)-1zt
w,t为转置矩阵。
[0024]
优选的,所述步骤3具体包括:
[0025]
构建所述cn(k)的实对称正定空间关联矩阵r,r=u
t
u/n,其中t为转置矩阵,
[0026]
r的特征值组成的k
×
k阶对角矩阵为λ,由特征向量转置组成的k
×
k阶矩阵为φ,则有:rφ=λφ;
[0027]
特征值λ
p
依照大小排序λ1≥λ2≥λ
p
≥
…
≥λk,特征向量为k维行向量,构建λ和φ的第一矩阵表达式:
[0028][0029]
求解所述第一矩阵表达式得到矩阵r的k个特征值λ
p
和特征向量
[0030]
将特征向量进行正交化和单位化处理,获得cn(k)的pod模态;其中,需满足:
[0031][0032][0033]
其中,q=1,2,
…
,k;
[0034]
特征值λ
p
代表第p阶模态所占总能量的百分比,则前p阶模态所占总能量百分比ratio为:
[0035][0036]
设在tn时刻的cn(k)在每个模态上的加权系数为dn(p),则满足:
[0037]
[dn(1),dn(2),
…
,dn(k)]=[cn(1),cn(2),
…
,cn(k)]φ
[0038]
在tn时刻的cn(k)使用前p阶模态重构得到系数
[0039]
优选的,本方法采用jacobi方法求解所述第一矩阵表达式。
[0040]
优选的,本方法采用schmidt方法对所述特征向量进行正交化处理。
[0041]
本发明还提供了一种波前特性分析系统,所述系统包括:
[0042]
第一波前获取单元,用于获取基于时间序列的第一波前wn(x,y),n=1,2,
…
,n,其
中,n为采样帧频总数,x和y分别为横坐标和纵坐标;
[0043]
第一波前表达式构建单元,用于基于泽尼克多项式和第一泽尼克多项式加权系数cn(k)构建所述wn(x,y)的第一波前表达式,求解所述第一波前表达式获得基于时间序列的所述cn(k),k=1,2,
…
,k,k为所述泽尼克多项式的阶数;
[0044]
第二泽尼克多项式加权系数获得单元,用于构建所述cn(k)的实对称正定空间关联矩阵r,计算所述r的k个特征值λ
p
,以及所述λ
p
对应特征向量p=1,2,
…
,k;所述cn(k)在所述上的加权系数为dn(p),基于所述得到第二泽尼克多项式加权系数其中,
[0045]
第二波前表达式构建单元,用于基于泽尼克多项式和所述第二泽尼克多项式加权系数构建第二波前的第二波前表达式;
[0046]
波前特性分析单元,用于基于所述第二波前表达式获得第二波前数据,基于所述第二波前数据进行波前特性分析。
[0047]
本发明提供的一个或多个技术方案,至少具有如下技术效果或优点:
[0048]
1.本发明中,相对于传统的波前模态pod本征正交分解方法,引入基于zernike多项式的波前重构步骤,最终只对zernike多项式加权系数而非波前本身开展pod本征正交分解,内存占用量和计算量随之显著降低。
[0049]
2.本发明中,给出波前用最小二乘法去波前倾斜相差、基于zernike多项式的波前重构及用最小二乘最小范数解获取zernike多项式加权系数、基于zernike多项式加权系数的pod本征正交分解、用jacobi方法求实对称正定矩阵特征值和特征向量、基函数即模态的schmidt方法正交化与单位化、基于pod本征正交分解的zernike多项式系数的波前重构等步骤或方法的详细内容,因此,本发明技术路径较为系统、全面,具有实际可操作性。
[0050]
3.本发明中,传统的波前模态pod本征正交分解的直接法,无法用于波前空间离散点数太多的波前pod本征正交分解。例如,波前采样像素是1024
×
1024,则需要求解104856
×
104856矩阵的特征值和特征向量,内存占用量和计算量太大,难于甚至根本无法在计算机上操作实现,而本方法内存占用量和计算量较低能够在计算机上容易实现。
[0051]
4.本发明中,传统的波前模态pod本征正交分解的“散斑照相”法,通常用约200帧随机抽样波前数据开展pod本征正交分解,由于采样帧数有限,这些帧数可能位于时间变化序列波前的不同位置,比如对于周期性变化的时间序列波前,这些帧数可能在一个周期内或者位于两个或多个周期中,必然导致用pod本征正交分解法获取的波前模态存在差异,同时用约200帧的有限波前数据无法很好地反映波前随时间变化的统计特性,而本发明对波前离散点数和采样帧频数均没有特别限制,具有较高的波前空间分辨率,同时能够充分反映时间变化序列波前的统计特性。
[0052]
5.本发明中,相对于传统的波前模态pod本征正交分解的直接法和“散斑照相”法,引入了基于zernike多项式的波前重构环节,对于任意复杂波面通常用约100阶的zernike多项式就能够基本复原波面形状,因此,若采用128阶zernike多项式进行波前重构,则在波前模态的pod本征正交分解中,只需要对128
×
128矩阵求特征值和特征向量,内存占用量和计算量随之显著降低,并在计算机也容易实现。因此,本发明相对于传统的波前模态pod本
征正交分解的直接法和“散斑照相”法,对波前离散点数和采样帧频数均没有特别限制,具有较高的波前空间分辨率,同时能够充分反映时间变化序列波前的统计特性。
附图说明
[0053]
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本发明的一部分,并不构成对本发明实施例的限定;
[0054]
图1是本发明实施例中波前特性分析方法的流程示意图;
[0055]
图2是本发明实施例中的两万帧波前重构的zernike多项式系数示意图;
[0056]
图3是本发明实施例中的波前模态能量百分比示意图;
[0057]
图4是本发明实施例中波前特性分析系统的组成示意图。
具体实施方式
[0058]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在相互不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
[0059]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述范围内的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0060]
实施例一
[0061]
本实施例提供了一种波前特性分析方法,通过对波前特性的分析,评估气动光学效应的主要相差和统计特征等,据此有针对性地发展流动控制技术、自适应光学ao校正技术等,用于抑制气动光学效应影响。pod本征正交分解方法在波前数据分析中应用广泛,它能够从上万帧时间序列变化波前数据中找到波前主要模态,并用前少数几阶模态就基本复原波前的复杂波面形状,比较适合于波前的主要特征以及占主导作用的相差分析。pod本征正交分解方法的这些优势有助于流动控制技术、自适应光学ao校正技术等的研制,从而在气动光学效应的抑制领域发挥独特作用,对于具体的波前特性分析本实施例不进行具体的赘述。
[0062]
本实施例中方法的具体步骤如下:
[0063]
1)时间序列波前扣除倾斜相差
[0064]
本步骤并不是必须的环节,但波前通常含有较大成分的倾斜相差,这部分倾斜相差会弱化波前高阶相差的分布以及在时间上的变化情况。设时间序列波前为wn(x,y)(n=1,2,
…
,n),其中n是采样帧频总数,在tn时刻波前含有的倾斜相差为anx bny,这里an和bn分别是x向和y向倾斜因子,则利用最小二乘原理:
[0065][0066]
由此得到倾斜因子an和bn,并把倾斜相差anx bny从tn时刻波前wn(x,y)中扣除。遍历所有时间序列波前wn(x,y)(n=1,2,
…
,n),在以下波前pod本征正交分解步骤中,波前均
扣除了倾斜相差。
[0067]
2)基于zernike多项式的波前重构
[0068]
zernike多项式代表的相差物理意义明确,并且只需要约100阶左右的zernike多项式就能够重构波前的复杂波面形状。在圆域内,在zernike多项式阶数k给定情况下,若tn时刻的波前wn(x,y)已知,则各阶zernike多项式的加权系数cn(k)是唯一确定的,反之,加权系数cn(k)确定,则在tn时刻的波前wn(x,y)也随之确定,因此,波前wn(x,y)与各阶zernike多项式的加权系数cn(k)之间是一一对应的。设zk(x,y)是zernike多项式,其前9阶的形式和代表的物理涵义如表1所示:
[0069]
表格1前9阶zernike多项式的物理意义
[0070]
模阶数极坐标zk(ρ,θ)直角坐标zk(x,y)相差意义1ρcosθxx方向倾斜2ρsinθyy方向倾斜32ρ
2-12(x2 y2)-1离焦4ρ2cos2θx
2-y2像散5ρ2sin2θ2xy像散6(3ρ
3-2ρ)cosθ3x(x2 y2)-2x彗差7(3ρ
3-2ρ)sinθ3y(x2 y2)-2y彗差8ρ3cos3θx(x
2-3y2)彗差9ρ3sin3θy(3x
2-y2)彗差
[0071]
其中,ρ和θ分别对应极坐标的矢径和极角;
[0072]
在tn时刻的wn(x,y)波前基于zernike多项式重构为:
[0073][0074]
上述(2)式中不包含倾斜相差,其中k=1代表第3阶zernike多项式。
[0075]
设波前在空间上的离散点数为m,(2)式可以写成矩阵形式:
[0076]
w=zc
ꢀꢀꢀ
(3)
[0077]
其中,w是由波前wn(x,y)组成的列向量,维数为m;z是由zernike多项式组成的矩阵,维数k
×
m;c是由加权系数cn(k)组成的列向量,维数为k。它们的具体形式如下:
[0078][0079]
方程组(3)的最小二乘最小范数解:
[0080]
c=(z
t
z)-1ztwꢀꢀꢀ
(5)
[0081]
由此得到在tn时刻波前wn(x,y)的zernike多项式加权系数cn(k)。遍历所有时间序列波前wn(x,y)重构,则获取时间序列加权系数cn(k)(n=1,2,
…
,n)。
[0082]
3)基于时间序列zernike多项式加权系数的pod本征正交直接法分解
[0083]
时间序列zenike多项式系数cn(k),采样数为n、选用zernike多项式阶数为k,即n=1,2,
…
,n和k=1,2,
…
,k,写成矩阵形式如下:
[0084][0085]
相应地,得到实对称正定空间关联矩阵:
[0086]
r=u
t
u/n
ꢀꢀꢀ
(7)
[0087]
其中,矩阵r是k
×
k阶的实对称正定方阵,所有特征值均为非负实数。设矩阵r的特征值组成的k
×
k阶对角矩阵为λ,由特征向量转置组成的k
×
k阶矩阵为φ,则有:
[0088]
rφ=λφ
ꢀꢀꢀ
(8)
[0089]
设矩阵r的k个特征值为λ
p
和特征向量为p=1~k和k=1~k,特征值λ
p
依照大小排序λ1≥λ2≥λ
p
≥
…
≥λk,特征向量是k维行向量,则:
[0090][0091]
上式(9)可以采用jacobi方法求解,分别得到矩阵r的k个特征值λ
p
和特征向量特征向量需要采用schmidt方法进行正交化(jacobi方法和schmidt方法可参考文献《计算方法引论》,徐萃薇编,高等教育出版社,1982,pp.175-184),并进行单位化处理,由此组成一组两两正交的单位基函数,又称为由zernike多项式加权系数cn(k)(n=1,2,
…
,n;k=1,2,
…
,k)的pod模态,它们两两之间互不相关。标准正交基函数或模态满足:
[0092][0093]
特征值λ
p
代表第p阶模态所占总能量的百分比,则前p阶模态(包含第p阶模态)所占总能量百分比ratio为:
[0094][0095]
设在tn时刻的zernike多项式系数cn(k)在每个模态上的投影即加权系数为dn(p),其中p=1~k,则满足:
[0096]
[dn(1),dn(2),
…
,dn(k)]=[cn(1),cn(2),
…
,cn(k)]φ
ꢀꢀꢀ
(12)
[0097]
设在tn时刻的zernike多项式系数cn(k)用前p阶模态重构得到系数1≤p≤k,上划线
“‑”
是区别于原始的zernike多项式系数cn(k),则:
[0098][0099]
4)基于pod本征正交分解的系数重构波前wn(x,y)
[0100]
在tn时刻,由pod本征正交分解前p阶模态重构获取的zernike多项式系数为采用与基于zernike多项式的波前重构同样方法,据此系数重构得到在tn时刻的波前上划线
“‑”
是为区别于原始的波前wn(x,y):
[0101][0102]
实施例二
[0103]
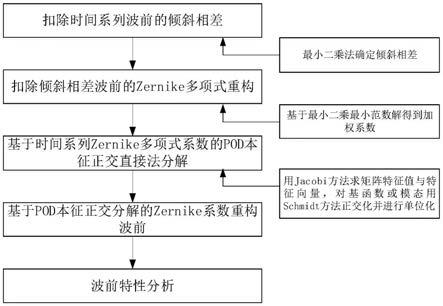
如图1所示,本发明实施例提供了一种波前模态pod本征正交分解新方法,其包括如下步骤:
[0104]
步骤一:扣除时间系列波前的倾斜相差,采用最小二乘法,遍历所有时间系列波前wn(x,y)(n=1,2,
…
,n),确定每帧波前包含的倾斜相差anx bny,并从各帧波前wn(x,y)中扣除;
[0105]
步骤二:扣除倾斜相差波前的zernike多项式重构,建立在tn时刻波前重构的系数矩阵w=zc,并基于最小二乘最小范数解c=(z
t
z)-1zt
w,得到第tn时刻的波前的各阶zernike多项式加权系数cn(k)(k=1,2,
…
,k),遍历所有时间系列波前,得到所有时间系列的加权系数cn(k)(n=1,2,
…
,n);
[0106]
步骤三:时间系列zernike多项式系数的pod本征正交直接法分解,根据波前zernike多项式的加权系数cn(k)(n=1,2,
…
,n;k=1,2,
…
,k),采用pod本征正交分解直接法,得到加权系数cn(k)的实对称正定空间关联矩阵rk×k,用jacobi方法计算矩阵rk×k的k个非负实特征值λ
p
和对应特征向量按照由大到小顺序λ1≥λ2≥
…
≥λk对特征值λ
p
和特征向量重新排序,特征向量是k维行向量即用schmidt方法对k个特征向量进行正交化和单位化处理,满足进行正交化和单位化处理,满足由此组成两两正交的单位基函数,又称为zernike多项式加权系数的pod模态;
[0107]
设在tn时刻的zernike多项式系数cn(k)在各阶模态上的加权系数为dn(p),其中p=1~k,则满足[dn(1),dn(2),
…
,dn(k)]=[cn(1),cn(2),
…
,cn(k)]φ,φ是由标准基函数转置组成的k
×
k阶矩阵,由此用前p阶模态重构得到zernike多项式加权系数1≤p≤k,上划线
“‑”
是区别于原始的zernike多项式系数cn(k);
[0108]
步骤四:基于pod本征正交分解的zernike多项式系数重构波前,由前p阶模态
重构得到的第tn时刻zernike多项式加权系数采用基于zernike多项式的波前重构的同样方法,得到在tn时刻的波前上划线
“‑”
是为区别于原始的波前wn(x,y)。
[0109]
本实施例采用非定常数值仿真方法开展马赫数m=0.3的圆柱绕流数值仿真,圆柱绕流在尾迹产生近似周期性的卡门涡街结构,利用几何光学的光线追迹方法计算气动光学效应,据此得到2万帧的时间系列波前数据;
[0110]
圆柱尾迹产生卡门涡街结构,光学观察窗口位于圆柱尾迹流动中,波前在空间上的离散点数采用101
×
101共计10201,若采用波前模态pod本征正交分解的直接法,需要求解10201
×
10201空间关联矩阵的特征值和特征向量,计算量和存储量大,难于甚至无法在计算机上操作实现;
[0111]
在实际例子中,由于圆柱尾迹流动卡门涡街等结构随时间发展变化,位于尾迹流动中的观察窗的波前分布也随时间发展变化,本发明采用2万帧时间系列波前开展pod本征正交分解,若采用“散斑照相”法,也采用2万帧的波前抽样,则需要求解20000
×
20000阶矩阵的特征值和特征向量,必然导致计算量和存储量较大而难于甚至无法在计算上操作实现,而采用约200帧的波前抽样,又会丢失波前随时间变化的大部分统计特征,并且采样帧频速度不同,这些波前帧数会位于2万帧波前的不同位置,pod本征正交分解得到的结果必然会有不同;
[0112]
在扣除倾斜相差后,并采用126阶zernike多项式(不含倾斜相差)重构得到的5帧时间系列波前,扣除倾斜相差前后的波前结果差异并不明显,说明波前中含有倾斜相差较小,同时用126阶的zernike多项式已经足以重构本发明实施例中的复杂波面形状;
[0113]
在实际应用中,可以获得本实施例中的两万帧波前的统计平均、pv与mse结果。
[0114]
如图2所示,本实施例采用126阶zernike多项式(不含倾斜相差),对2万帧扣除倾斜相差的时间系列波前进行重构,各阶zernike多项式的加权系数绝对值|cn(k)|的分布情况,加权系数随阶数增加而呈现下降趋势,在不同tn时刻差异大,说明波前以低阶相差为主,高阶相差成分占比不高,波前随时间发展变化大。
[0115]
本发明实施例可以获得波前的前五阶pod模态分布情况,基于2万帧波前的zernike多项式的加权系数cn(k)(n=1,2,
…
,20000;k=1,2,
…
,126),采用pod本征正交分解直接法进行分解,求解加权系数cn(k)的126
×
126阶空间关联矩阵r
126
×
126
的特征值λ
p
和特征向量其中p=1,2,
…
,126,λ
p
和已按照λ1≥λ2≥
…
≥λ
126
大小顺序排序,同时还采用schmidt方法正交化和单位化处理,然后分别采用前五阶模态重构zernike多项式的加权系数再由加权系数重构得到相应的波前模态波前一阶模态与波前统计平均值(稳态相差)分布接近,二阶与三阶、四阶与五阶模态相互对应;
[0116]
请参考图3,本实施例获得126阶波前模态能量的百分比分布曲线,通过观察曲线获得波前能量主要集中在前5阶模
态,其中第1阶模态能量占比最大,约71.8%,前5阶模态能量之和占比达到99.6%,因此pod本征正交分解的最大优势是只需要前少数几阶模态就能够基本复原波前的复杂波面形状;
[0117]
本发明实施例采用不同阶模态重构的5帧系列波前,对应5帧系列,加权系数部分采用前4阶模态重构即p=4,部分采用前10阶模态重构即p=10,部分采用完整的126阶模态重构即p=126,前4阶模态已经能够基本复原波前波面形状,前10阶模态与全126阶模态重构的波前差异不明显,126阶模态重构的波前与时间系列波前(扣除了倾斜相差)吻合很好,进一步证明pod本征正交分解方法只需要少数几阶模态就能够重构波前复杂波面形状,同时验证了本发明的一种波前模态pod本征正交分解新方法的可靠性。
[0118]
实施例三
[0119]
请参考图4,图4为波前特性分析系统的组成示意图,本发明实施例三还提供了一种波前特性分析系统,所述系统包括:
[0120]
第一波前获取单元,用于获取基于时间序列的第一波前wn(x,y),n=1,2,
…
,n,其中,n为采样帧频总数,x和y分别为横坐标和纵坐标;
[0121]
第一波前表达式构建单元,用于基于泽尼克多项式和第一泽尼克多项式加权系数cn(k)构建所述wn(x,y)的第一波前表达式,求解所述第一波前表达式获得基于时间序列的所述cn(k),k=1,2,
…
,k,k为所述泽尼克多项式的阶数;
[0122]
第二泽尼克多项式加权系数获得单元,用于构建所述cn(k)的实对称正定空间关联矩阵r,计算所述r的k个特征值λ
p
,以及所述λ
p
对应特征向量p=1,2,
…
,k;所述cn(k)在所述上的加权系数为dn(p),基于所述得到第二泽尼克多项式加权系数其中,
[0123]
第二波前表达式构建单元,用于基于泽尼克多项式和所述第二泽尼克多项式加权系数构建第二波前的第二波前表达式;
[0124]
波前特性分析单元,用于基于所述第二波前表达式获得第二波前数据,基于所述第二波前数据进行波前特性分析。
[0125]
尽管已描述了本发明的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本发明范围的所有变更和修改。
[0126]
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。