技术特征:
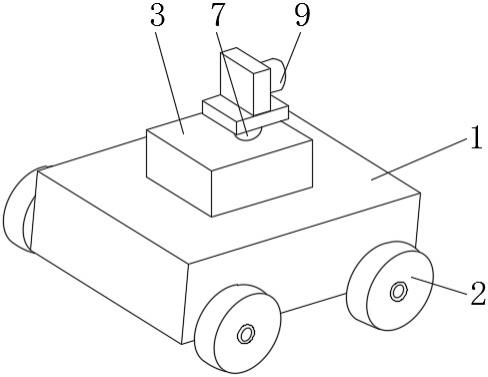
1.具备蓝牙控制的救灾道路探索车,包括车体(1),其特征在于:所述车体(1)正面和背面的两侧均固定连接有移动轮(2),所述车体(1)的顶部固定连接有调节盒(3),所述调节盒(3)的右侧固定连接有辅助照明灯(4),所述调节盒(3)内腔底部的左侧固定连接有调节电机(5),所述调节电机(5)输出端的顶部固定连接有第一齿轮(6),所述调节盒(3)内腔的底部且位于调节电机(5)的右侧活动连接有旋转杆(7),所述旋转杆(7)的表面套设有第二齿轮(8),所述第二齿轮(8)的左侧与第一齿轮(6)啮合,所述旋转杆(7)的顶部贯穿至调节盒(3)的顶部并固定连接有摄像头(9);所述摄像头(9)的输出端单向电连接有控制器模块(10),所述控制器模块(10)的输出端分别与调节电机(5)和辅助照明灯(4)的输入端单向电连接,所述控制器模块(10)的输出端分别单向电连接有电机驱动模块(11)和语音播报模块(13),所述电机驱动模块(11)的输出端单向电连接有驱动电机(12),所述控制器模块(10)的输入端单向电连接有电压比较模块(14),所述电压比较模块(14)的输入端单向电连接有放大模块(15),所述放大模块(15)的输入端单向电连接有滤波模块(16),所述滤波模块(16)的输入端单向电连接有环境检测模块(17),所述环境检测模块(17)包括烟雾检测模块(18)、温湿度检测模块(19)、红外火焰传感器(20)和可燃气体浓度检测模块(21),所述控制器模块(10)的输出端分别双向电连接有蓝牙通信模块(22)、避障模块(23)、gps定位模块(24)和数据存储模块(25),所述蓝牙通信模块(22)的输入端双向电连接有远程控制终端(26),所述远程控制终端(26)包括控制按键模块(27)、oled液晶显示模块(28)和语音输入模块(29),所述避障模块(23)包括超声波避障传感器(30)和红外光电传感器(31)。2.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:所述控制器模块(10)的型号为stm32rct6,所述摄像头(9)的型号为ov7670。3.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:所述电机驱动模块(11)的型号为am2857,所述语音输入模块(29)为麦克风,所述语音播报模块(13)为扬声器。4.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:所述烟雾检测模块(18)为mq-2烟雾检测传感器,所述温湿度检测模块(19)为dht11温湿度传感器,所述可燃气体浓度检测模块(21)为可燃气体浓度检测传感器。5.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:所述放大模块(15)为电信号放大器,所述滤波模块(16)为电信号滤波器。6.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:所述数据存储模块(25)为固态存储器,所述gps定位模块(24)为gps定位器。7.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:所述控制器模块(10)的输入端单向电连接有继电器(32),所述继电器(32)的输入端单向电连接有电源模块(33)。8.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:所述驱动电机(12)为直流减速电机,所述移动轮(2)为麦克纳姆轮。9.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:所述旋转杆(7)的表面与调节盒(3)的连接处通过轴承活动连接,所述旋转杆(7)的表面与第二齿轮(8)固定连接。
10.根据权利要求1所述的具备蓝牙控制的救灾道路探索车,其特征在于:其控制方法包括以下步骤:a、使用者操作远程控制终端(26),通过蓝牙通信模块(22)的配合向控制器模块(10)发送控制信号,控制器模块(10)通过电机驱动模块(11)的配合控制驱动电机(12)开启能够带动移动轮(2)转动,移动轮(2)转动可以使车体(1)进行移动;b、摄像头(9)可以拍摄现场画面,环境检测模块(17)中的烟雾检测模块(18)、温湿度检测模块(19)、红外火焰传感器(20)和可燃气体浓度检测模块(21)可以检测现场的环境数据,避障模块(23)中的超声波避障传感器(30)和红外光电传感器(31)可以对障碍物进行检测,方便车体(1)进行避障,这些数据通过控制器模块(10)和蓝牙通信模块(22)的配合可以反馈至远程控制终端(26),最后通过oled液晶显示模块(28)进行显示,方便操作人员远程了解现场信息;c、使用者通过gps定位模块(24)的配合可以了解车体(1)实时位置信息,通过语音播报模块(13)可以播放语音数据,对灾难现场的人员进行提醒,方便远程操作人员快速找到现场人员;d、需要调节摄像头(9)角度时,操作远程控制终端(26),通过蓝牙通信模块(22)和控制器模块(10)的配合向调节电机(5)发送控制信号,调节电机(5)开启通过第一齿轮(6)和第二齿轮(8)的配合带动旋转杆(7)转动,旋转杆(7)转动会带动摄像头(9)进行调节,可以方便远程操作人员更全面的了解现场。
技术总结
本发明公开了具备蓝牙控制的救灾道路探索车,包括车体,所述车体正面和背面的两侧均固定连接有移动轮。本发明通过车体、移动轮、辅助照明灯、摄像头、控制器模块、电机驱动模块、驱动电机、电压比较模块、放大模块、滤波模块、环境检测模块、烟雾检测模块、温湿度检测模块、红外火焰传感器、可燃气体浓度检测模块、蓝牙通信模块、避障模块、GPS定位模块、数据存储模块、远程控制终端、超声波避障传感器和红外光电传感器,解决了目前不方便对灾难现场进行探索,不能够保证操作人员安全的问题,该救灾道路探索车,具备可以采集路况信息,基本满足实验要求,实现了操作人员的远程控制与监测,进一步保障了操作人员安全的优点。一步保障了操作人员安全的优点。一步保障了操作人员安全的优点。
技术研发人员:李早刚 龚凡 何榕旺 罗志锋
受保护的技术使用者:广州理工学院
技术研发日:2021.12.24
技术公布日:2022/3/25
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。