1.本发明涉及人工影响天气中的安全射界技术领域,具体而言,涉及一种安全射界图有效射界区域分析方法及系统。
背景技术:
2.实践证明,在一定条件下,人工影响天气作业可以有效进行防雹增雨,多年来人工增雨在抗旱、水库蓄水、森林防灭火、降低大气污染等方面发挥了重要作用,赢得了历届领导的赞扬和广大市民的欢迎;因此,在目前极端天气频发高发的形势下建立反应快速、科学作业、高效安全的人影标准化固定作业站点,并按照国家规范绘制人工影响天气火箭作业点安全射界图,以提高人工影响天气的应急能力,减轻或避免因干旱或冰雹等自然灾害造成的经济损失和人员伤亡很有必要。
3.目前,气象局通过定期更新绘制纸质射界图,没有通过gis技术手段,缺乏有效的误差控制;且其绘制过程都是手动完成,然后通过人工直观判别射界范围,未必能够获取最佳方案;且手动绘制过程中由于发射点固定,不仅绘制效率低,还会因为缺乏灵活性导致无法应对紧急情况。
技术实现要素:
4.本发明提供一种安全射界图有效射界区域分析方法及系统,旨在通过引入gis技术手段,通过信息技术更准确的控制误差,快速获取任意发射点的最佳射界方案,以解决现有技术中手动绘制过程由于发射点固定,绘制效率低,缺乏灵活性导致无法应对紧急情况的问题。
5.本发明的实施例通过以下技术方案实现:一种安全射界图有效射界区域分析方法,包括如下步骤:
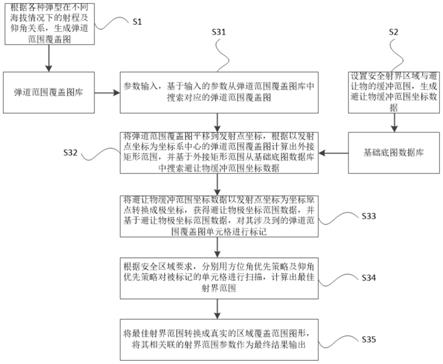
6.s1.根据各种弹型在不同海拔情况下的射程及仰角关系,构建弹道范围覆盖图库;
7.s2.设置安全射界区域与避让物的缓冲范围,生成避让物缓冲范围坐标数据,构建基础底图数据库;
8.s3.参数输入,在弹道范围覆盖图库和基础设施数据库中搜索所述参数对应的数据,基于gis技术对所述参数进行分析获取有效射界区域;所述参数包括发射点坐标、海拔以及弹型;
9.步骤s3具体包括:
10.s31.参数输入,基于输入的参数从所述弹道范围覆盖图库中搜索对应的弹道范围覆盖图;
11.s32.将所述弹道范围覆盖图平移到发射点坐标,根据以发射点坐标为坐标系中心的所述弹道范围覆盖图计算出外接矩形范围,并基于所述外接矩形范围从所述基础底图数据库中搜索避让物缓冲范围坐标数据;
12.s33.将所述避让物缓冲范围坐标数据以发射点坐标为坐标原点转换成极坐标,获
得避让物极坐标范围数据,并基于所述避让物极坐标范围数据,对其涉及到的弹道范围覆盖图单元格进行标记;
13.s34.根据安全区域要求,分别用方位角优先策略及仰角优先策略对被标记的单元格进行扫描,计算出最佳射界范围;
14.s35.将所述最佳射界范围转换成真实的区域覆盖范围图形,将其相关联的射界范围参数作为最终结果输出。
15.根据一种优选实施方式,步骤s32中将所述弹道范围覆盖图平移到发射点坐标具体包括:
16.使用坐标转换方法,将以(0,0)为坐标系中心的弹道范围覆盖图转换到以发射点坐标为坐标系中心。
17.进一步的,步骤s33之前还包括:
18.以正北为起点,顺时针360度等分所述弹道范围覆盖图,将其划分为若干个子扇形单元格,若干个所述子扇形单元格中每个单元格角度相差一度,半径相差弹型参数仰角增加1度。
19.根据一种优选实施方式,步骤s34中根据安全区域要求,分别用方位角优先策略及仰角优先策略对被标记的单元格进行扫描具体包括:
20.s341.计算出所有不满足标记原则的连续单元格区域,得到射界范围区间;
21.s342.分别用方位角优先策略及仰角优先策略,对不符合策略要求的所述射界范围区间进行过滤;其中所述方位角优先策略的要求为方位角不小于15度;所述仰角优先策略的要求为仰角不小于10度。
22.根据一种优选实施方式,步骤s34中计算出最佳射界范围具体包括:
23.s343.对比方位角优先策略及仰角优先策略的扫描结果,按排列组合的方式得到两种扫描结果所形成的所有组合方式,生成候选方案;
24.s344.按照区域无相互覆盖及覆盖范围最大原则筛选所述候选方案,得到符合要求的最佳射界范围方案。
25.本发明同时还提供一种安全射界图有效射界区域分析系统,应用到上述所述的方法,包括:
26.第一数据预处理模块,用以根据各种弹型在不同海拔情况下的射程及仰角关系,构建弹道范围覆盖图库;
27.第二数据预处理模块,用以设置安全射界区域与避让物的缓冲范围,生成避让物缓冲范围坐标数据,构建基础底图数据库;
28.分析模块,与所述弹道范围覆盖图库以及基础底图数据库连接,用以根据输入的参数,在弹道范围覆盖图库和基础设施数据库中搜索所述参数对应的数据,基于gis技术对所述参数进行分析获取有效射界区域;所述参数包括发射点坐标、海拔以及弹型。
29.本发明同时还提供一种安全射界图有效射界区域分析装置,包括存储器和处理器;
30.所述存储器用于存储计算机程序;
31.所述处理器用于执行所述计算机程序实现上述所述的方法。
32.本发明同时还提供一种存储介质,所述存储介质存储有计算机程序,所述计算机
程序被处理器运行时实现上述所述的方法。
33.本发明实施例的技术方案至少具有如下优点和有益效果:气象局通过定期更新绘制纸质射界图,没有通过gis技术手段,缺乏有效的误差控制;且其绘制过程都是手动完成,然后通过人工直观判别射界范围,未必能够获取最佳方案;且手动绘制过程中由于发射点固定,不仅绘制效率低,还会因为缺乏灵活性导致无法应对紧急情况。本发明提出的安全射界图有效射界区域分析方法通过引入gis技术手段,通过信息技术更准确的控制误差,能够快速分析获取任意发射点的最佳射界方案。相较于纸质射界图,具有更高的时效性以及灵活性。
附图说明
34.图1为本发明实施例1提供的安全射界图有效射界区域分析方法流程示意图;
35.图2为本发明实施例1提供的分析步骤流程示意图;
36.图3为本发明实施例1提供的安全射界图有效射界区域分析系统结构框图;
37.图4为本发明实施例1提供的区域覆盖范围图形示意图;
38.图标:100-第一数据预处理模块,200-第二数据预处理模块,300-分析模块,400-基础底图数据库,500-弹道范围覆盖图库。
具体实施方式
39.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
40.实施例1
41.参阅图1所示,图1为本发明实施例提供的安全射界图有效射界区域分析方法流程示意图。
42.需要说明的是,目前气象局通过定期更新绘制纸质射界图,没有通过gis技术手段,缺乏有效的误差控制;且其绘制过程都是手动完成,然后通过人工直观判别射界范围,未必能够获取最佳方案;且手动绘制过程中由于发射点固定,不仅绘制效率低,还会因为缺乏灵活性导致无法应对紧急情况。所以,本发明实施例提供了安全射界图有效射界区域分析方法。具体内容如下所述:
43.首先,对本实施例具体预处理步骤进行说明:
44.获取弹型及弹道参数,以及不同弹型在不同海拔下的发射仰角和射程的关系,以及该弹型火箭弹的最大、最小射程数据;
45.根据上述获得的数据中各种弹型在不同海拔情况下的射程及仰角关系,计算出各种弹型在不同海拔范围下的弹道范围覆盖图并存储,构建弹道范围覆盖图库。其中,对于弹道范围覆盖图还需要进行网格划分处理,具体为:以正北为起点,顺时针360度等分所述弹道范围覆盖图,将其划分为若干个子扇形单元格,若干个所述子扇形单元格中每个单元格角度相差一度,半径相差弹型参数仰角增加1度。
46.进一步的,获取避让物数据,包括厂矿、飞机场、加油站、居名点、军事设施、文物古
迹、学校等一系列基础设施数据,以及影像数据及dem数据等参考底图。
47.为进一步降低人影误差产生的事故概率,在本实施例中对上述获取的避让物数据中厂矿、飞机场、加油站、居名点、军事设施、文物古迹、学校等需要避让设施200米内的范围进行避让;进而就需要对安全射界区域与避让物进行200米缓冲区范围进行计算,计算得到避让物缓冲范围坐标数据并保存,构建基础底图数据库;需要注意的是,避让物数据更新需要在基础底图数据库中对其对应的避让物缓冲范围坐标数据进行同步更新。
48.需要说明的是,在本实施例上述步骤中,将已确定变动较少的关键性分析数据进行预处理,以使得在分析过程中能够直接调用,提高了分析执行效率,缩短了分析时间。
49.参阅图2所示,以下对本实施例基于gis技术对数据进行分析获取有效射界区域的具体分析步骤进行说明:
50.首先,输入分析过程中必要的三个输入参数,分别为发射点坐标、海拔和弹型;进而根据弹型和海拔在弹道范围覆盖图库中直接检索到对应的弹道范围覆盖图数据,以此能够省去计算过程,大大提高分析效率。
51.进一步的,将所述弹道范围覆盖图平移到发射点坐标,具体为:使用坐标转换方法,将以(0,0)为坐标系中心的弹道范围覆盖图转换到以发射点坐标为坐标系中心。
52.根据以发射点坐标为坐标系中心的所述弹道范围覆盖图计算出外接矩形范围,并基于所述外接矩形范围从所述基础底图数据库中搜索避让物缓冲范围坐标数据。
53.进一步的,将所述避让物缓冲范围坐标数据以发射点坐标为坐标原点转换成极坐标,获得避让物极坐标范围数据;具体的,在本实施例中,将上一步搜索获得的避让物缓冲范围坐标数据由原坐标为(x,y)坐标,转换成一发射点坐标为坐标原点的极坐标(a,r),其中,a是角度,r是半径。具体转换过程如下:
54.通过如下公式计算出极坐标角度a,公示表示为:
55.tana=(y-y0)/(x-x0)
56.上式中,(x0,y0)指发射点坐标;
57.计算半径r,公式表示为:
58.r2=(x-x0)2 (y-y0)259.将避让物的每个坐标点按照上述方法进行坐标转换。
60.进一步的,基于所述避让物极坐标范围数据,对其涉及到的弹道范围覆盖图单元格(每个单元格角度相差一度,半径相差弹型参数倾角增加一度对应的射程差)进行标记(是或者否),是则需要避让,否则不需要避让。在本实施例中,具体通过如下方式确定是否需要标记:
61.计算出避让物覆盖范围集合cd,cd={(0,1),(0,2),(1,1),(1,2),......},(0,1)为及坐标位置索引;
62.将所有避让物覆盖范围在弹型覆盖范围图上进行标记,得到集合cd和安全范围集合cs。
63.进一步的,根据安全区域要求,分别用方位角优先策略及仰角优先策略对被标记的单元格进行扫描,具体为:计算出所有不满足标记原则的连续单元格区域,得到射界范围区间;分别用方位角优先策略及仰角优先策略,对不符合策略要求的所述射界范围区间进行过滤;其中所述方位角优先策略的要求为方位角不小于15度;所述仰角优先策略的要求
为仰角不小于10度。
64.进而,通过对比方位角优先策略及仰角优先策略的扫描结果,按排列组合的方式得到两种扫描结果所形成的所有组合方式,生成候选方案;按照区域无相互覆盖及覆盖范围最大原则筛选所述候选方案,得到符合要求的最佳射界范围方案,计算出最佳射界范围。具体步骤如下:
65.首先,将方位角优先策略下的区域列表与倾角优先测量下的区域列表合并成一个列表,例如:
66.c
方位角优先策略
=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
,
……
]
[0067]c倾角优先策略
=[scope
r1
,scope
r2
,scope
r3
,scope
r4
,scope
r5
,
……
]
[0068]
则,c
全部区域
=c
方位角优先策略
c
倾角优先策略
=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
,scope
r4
,scope
r5
……
]
[0069]
进一步的,从n个不同元素组成的c
全部区域
集合中取出m个不同元素的排列种,当m<n时,这个排列称为选排列;当m=n时,这个排列称为全排列。n个元素的全排列的个数记为pn,由此得到排列集合pn:
[0070]
pn=n(n-1)(n-2)...3
×2×
1=n
[0071]
其中,p1=[scope
a1
]
[0072]
p2=[scope
a1
,scope
a2
]
[0073]
p3=[scope
a1
,scope
a2
,scope
a3
]
[0074]
p4=[scope
a1
,scope
a2
,scope
a3
,scope
a4
]
[0075]
p5=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
]
[0076]
p6=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
]
[0077]
p7=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
]
[0078]
p8=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
]
[0079]
p9=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
,scope
r4
]
[0080]
p
10
=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
,scope
r4
,scope
r5
]
[0081]
p
11
=[scope
a1
,scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
,scope
r4
,scope
r5
,
……
]
[0082]
p
12
=[scope
a2
]
[0083]
p
13
=[scope
a2
,scope
a3
]
[0084]
p
14
=[scope
a2
,scope
a3
,scope
a4
]
[0085]
p
15
=[scope
a2
,scope
a3
,scope
a4
,scope
a5
]
[0086]
p
16
=[scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
]
[0087]
p
17
=[scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
]
[0088]
p
18
=[scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
]
[0089]
p
19
=[scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
,scope
r4
]
[0090]
p
20
=[scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
,scope
r4
,scope
r5
]
[0091]
p
21
=[scope
a2
,scope
a3
,scope
a4
,scope
a5
,scope
r1
,scope
r2
,scope
r3
,scope
r4
,scope
r5
,
……
]
[0092]
p......=[
………………………………………
]
[0093]
进一步的,按照区域无相关覆盖及覆盖最大原则,对所有候选方案进行计算筛选,得到符合要求的一组方案作为最佳射界范围方案。
[0094]
示例的,可以通过调用for循环方法来对所有候选方案进行计算筛选。具体可以为:
[0095]
通过调用for循环方法for(i=1;i《pn.length;i )方法,可将在长度pn.length范围内的候选方案中的所有元素以数组的方式进行依次遍历解析。
[0096]
在for循环方法中,i为候选方案中的元素的游标位置,i 表示按游标位置依次加1的形式进行遍历。同时,可将获取到的字符数据标记为pn[i].length,以进行嵌套循环的下一步判断。
[0097]
进一步的,通过调用for循环方法
[0098]
for(smin=0;s min《pn[i].length-1;s min )方法,可将在长度pn[i].length-1范围内的候选方案中的所有元素以数组的方式进行依次遍历解析。
[0099]
在for循环方法中,smin为候选方案中的元素的最底层的游标位置,smin 表示按游标位置依次加1的形式进行遍历。
[0100]
进一步的,通过调用for循环方法
[0101]
for(smax=s min 1;s max《pn[i].length;s max )方法,可将在长度pn[i].length范围内的候选方案中的所有元素以数组的方式进行依次遍历解析。
[0102]
在for循环方法中,smax为候选方案中的smin 1的游标位置,smax 表示按游标位置依次加1的形式进行遍历。
[0103]
进一步的,若isoverlap(pn[i][smin],pn[i][s max])返回的是true,
[0104]
表明(pn[i][smin],pn[i][s max])区间存在完全覆盖,则结束循环;
[0105]
如果hasoverlap(pn[i][smin],pn[i][s max])返回的是true,
[0106]
表面(pn[i][smin],pn[i][s max])区间存在相互覆盖,则结束循环;
[0107]
进一步的,如果上述排列方式的所有区间不存在相互覆盖,则统计最大覆盖面积的排列方式;
[0108]
示例的,以按游标位置i获取到的字符数据tempcellcount定义总的区间字符数据sumcellcount(pn[i]),进一步统计最大覆盖面积的排列方式,当最大覆盖面积maxcellcount等于tempcellcount时,以对应的pn[i]作为最佳射界方案。
[0109]
以下附上相关语法:
[0110]
[0111][0112]
最终,将所述最佳射界范围转换成真实的区域覆盖范围图形,将其相关联的射界范围参数作为最终结果输出。区域覆盖范围图形如图4所示。
[0113]
参阅图3所示,本发明实施例还提供一种安全射界图有效射界区域分析系统,包括:
[0114]
第一数据预处理模块,用以根据各种弹型在不同海拔情况下的弹道参数,构建弹道范围覆盖图库,在本实施例中弹道参数包括射程及仰角关系;
[0115]
第二数据预处理模块,用以根据获取的避让物数据,设置安全射界区域与避让物的缓冲范围,生成避让物缓冲范围坐标数据,构建基础底图数据库;在本实施例中,避让物数据包括基础设施数据、影像数据以及dem数据。
[0116]
分析模块,与所述弹道范围覆盖图库以及基础底图数据库连接,用以根据输入的参数,在弹道范围覆盖图库和基础设施数据库中搜索所述参数对应的数据,基于gis技术对所述参数进行分析获取有效射界区域,输出射界范围参数;所述参数包括发射点坐标、海拔以及弹型。在本实施例中射界范围参数包括:方位角以及仰角。需要说明的是,分析模块的
具体分析方法如安全射界图有效射界区域分析方法所示。
[0117]
本发明实施例还提供一种安全射界图有效射界区域分析装置,包括存储器和处理器;所述存储器用于存储计算机程序;所述处理器用于执行所述计算机程序实现上述安全射界图有效射界区域分析方法。
[0118]
本发明实施例还提供一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器运行时实现安全射界图有效射界区域分析方法。
[0119]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
