1.本发明涉及半导体制造技术领域,更具体涉及一种半导体设备的载入装置以及半导体设备。
背景技术:
2.传统半导体设备的晶圆载入端(loadport),位于前端模块(equiment front end module,简称efem)的正前方,其位置为一般是固定的,并且,晶圆载入端的高度等尺寸会严格按照半导体行业的规范来执行。
3.在一些特殊工艺的制造设备当中,根据设置需求连接efem的下一站模组(例如:反应腔或真空传送装置等)时,晶圆传送接口的位置在垂直方向上会与晶圆载入端loadport和机器手臂robot有很大的落差。
4.现有efem内的机器手在垂直方向进行长距离移动时一般会超出机器手臂本身在垂直方向上的最大移动距离。为满足传送需求,会采用升降平台的方式,将机器手臂整体或部分进行垂直方向的长距离移动。由此,会带来额外的大型移动平台设备的需求而导致成本较大。另外,整体移动机器手臂会影响整体工作效率,并带来可靠性等方面的隐患。
5.有鉴于此,有必要对现有技术中的半导体设备的载入装置予以改进,以解决上述问题。
技术实现要素:
6.本发明的目的在于公开一种半导体设备的载入装置以及半导体设备,用以解决现有技术中需要额外大型移动平台设备以实现机器手臂整体或部分沿垂直方向的长距离移动而导致成本较高、效率低、可靠性存在风险的问题。
7.为实现上述目的,本发明提供了一种半导体设备的载入装置,包括:
8.载台,用于承载配置有第一活动开口的电子元件存储盒;
9.与所述电子元件存储盒相吸附的片库接口板,所述片库接口板配置有与所述第一活动开口相对的第二活动开口;以及,
10.布置于半导体设备正面的升降机构,用于在纵向移动时同时带动所述片库接口板和所述电子元件存储盒纵向移动以调节所述片库接口板的第二活动开口和所述电子元件存储盒的第一活动开口的垂直位置。
11.作为本发明的进一步改进,所述升降机构包括:
12.纵向布置于半导体设备正面的纵梁;
13.布置于所述纵梁上的移动件,所述移动件纵向移动时同时带动所述片库接口板和所述电子元件存储盒纵向移动。
14.作为本发明的进一步改进,所述升降机构还包括:
15.布置于所述移动件上的固定件,用于固定所述电子元件存储盒。
16.作为本发明的进一步改进,所述移动件配置为横置于所述纵梁上且沿所述纵梁纵
向移动的移动横梁,所述固定件配置为用于夹持所述电子元件存储盒的夹持件。
17.作为本发明的进一步改进,所述夹持件配置为一对夹板,所述电子元件存储盒的外侧布置有一对拉手,两个夹板的内壁面形成有用于固定所述拉手的固定部。
18.作为本发明的进一步改进,所述移动件配置为纵向布置于所述纵梁上的牵引件,所述固定件配置为用于固定所述电子元件存储盒的钩持件。
19.作为本发明的进一步改进,所述纵梁上构造有横向布置的定位梁,所述牵引件布置于所述定位梁上。
20.作为本发明的进一步改进,所述移动件配置为移动滑板,所述移动滑板与所述片库接口板紧贴布置,且所述载台与所述片库接口板紧贴布置,所述移动滑板沿所述纵梁纵向移动时同时带动所述片库接口板、所述电子元件存储盒以及所述载台纵向移动;
21.其中,所述移动滑板配置有与所述第二活动开口相对的窗口。
22.作为本发明的进一步改进,
23.所述纵梁形成有纵向配置的移动轨道,以使所述移动件能够沿所述移动轨道纵向移动。
24.本发明还提供一种半导体设备,包括:
25.半导体设备前端模块;以及
26.所述载入装置,所述载入装置布置于半导体设备前端模块的正面,通过所述升降机构的纵向移动同时带动所述片库接口板和所述电子元件存储盒纵向移动以调节所述片库接口板的第二活动开口和所述电子元件存储盒的第一活动开口的垂直位置。
27.与现有技术相比,本发明的有益效果是:
28.本发明的半导体设备的载入装置通过布置于半导体设备正面的升降机构的纵向移动带动片库接口板和电子元件存储盒纵向移动,以将片库接口板的第二活动开口和电子元件存储盒的第一活动开口,调节至目标位置处,例如晶圆传送接口的位置。由此可见,本发明的半导体设备的载入装置,无需使机器手臂整体或部分沿垂直方向的长距离移动,通过升降机构即可快速且有效地将电子元件存储盒的垂直位置调节至便于机器手伸入其中的目标位置,从而不仅解决了现有技术中需要额外大型移动平台设备以实现机器手臂整体或部分垂直方向的长距离移动而导致成本较高的问题,而且还提高了电子元件的传送接口与机器手臂在垂直方向上的匹配效率和可靠性。
附图说明
29.图1为本发明一个实施例的半导体设备的载入装置的整体结构示意图;
30.图2为图1中m处的示意性放大结构图;
31.图3为本发明另一个实施例的半导体设备的载入装置的整体结构示意图;
32.图4为图3中n处的示意性放大结构图;
33.图5为本发明再一个实施例的半导体设备的载入装置的示意性结构图;
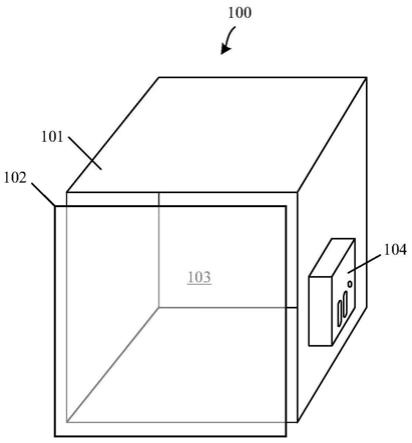
34.图6为本发明一个实施例的半导体设备的示意性结构图。
具体实施方式
35.下面结合附图所示的各实施方式对本发明进行详细说明,但应当说明的是,这些
实施方式并非对本发明的限制,本领域普通技术人员根据这些实施方式所作的功能、方法、或者结构上的等效变换或替代,均属于本发明的保护范围之内。
36.需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”、“正方向”、“负方向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术方案和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术方案的限制。
37.结合图1至图6进行说明,本发明实施例提供一种半导体设备的载入装置,包括:载台10,用于承载配置有第一活动开口301的电子元件存储盒30;与电子元件存储盒30相吸附的片库接口板20,片库接口板20配置有与第一活动开口301相对的第二活动开口201;以及,布置于半导体设备100正面100a的升降机构(升降机构40a,升降机构40b,升降机构40c),用于在纵向移动时同时带动片库接口板20和电子元件存储盒30纵向移动以调节片库接口板20的第二活动开口201和电子元件存储盒30的第一活动开口301的垂直位置。其中,电子元件可以为晶圆、氮化钾或光伏组件等片状电子元件。电子元件存储盒30具体可以为晶圆盒或者其他可以放置片状电子元件的盒体,载台10即为晶圆载入端loadport。
38.本发明实施例的半导体设备的载入装置通过布置于半导体设备100正面100a的升降机构的纵向移动带动片库接口板20和电子元件存储盒30纵向移动,以将片库接口板20的第二活动开口201和电子元件存储盒202的第一活动开口调节至目标位置处。由此可见,本发明实施例的半导体设备的载入装置无需使机器手臂进行整体或部分沿垂直方向的长距离移动,通过升降机构即可快速且有效地将电子元件存储盒的垂直位置调节至便于机器手伸入其中的目标位置,从而不仅解决了现有技术中需要额外大型移动平台设备以实现机器手臂整体或部分沿垂直方向的长距离移动而导致成本较高的问题,而且还提高了电子元件的传送接口与机器手臂在垂直方向上的匹配效率和可靠性。
39.需要说明的是,本发明实施例所限定的目标位置基于机器手的尺寸而定,以便于机器手在垂直方向可移动的范围内操作即可通过片库接口板20的第二活动开口201和电子元件存储盒30的第一活动开口301伸入至电子元件存储盒30内。
40.在上述实施例中,升降机构包括:纵向布置于半导体设备正面100a的纵梁41;布置于纵梁41上的移动件(401a,401b,401c),移动件纵向移动时同时带动片库接口板20和电子元件存储盒30纵向移动。其中,纵梁41形成有纵向配置的移动轨道410,以使移动件能够沿移动轨道410纵向移动。纵梁41配置有两个,且两个纵梁41平行间隔布置于半导体设备100正面100a的两侧,且便于机器手沿y轴方向从半导体设备100的背面100b通过片库接口板20的第二活动开口201、电子元件存储盒30的第一活动开口301伸入至电子元件存储盒30内。
41.在一个具体实施例中,结合图1和图2进行说明,升降机构40a还包括:布置于移动件401a上的固定件402a,用于固定电子元件存储盒30。移动件401a配置为横向布置于纵梁41上且沿纵梁41纵向移动的移动横梁,固定件402a配置为用于夹持电子元件存储盒30的夹持件。
42.具体地,夹持件配置为一对夹板,电子元件存储盒30的外侧布置有一对拉手302,两个夹板的内壁面形成有用于固定拉手302的固定部403。两个夹板靠近顶端的侧部均紧贴
移动横梁的外侧。当然,可通过将两个夹板的顶端布置于移动横梁的底面实现夹板与移动横梁的连接。移动横梁的底面是指在垂直方向(即z轴方向)上移动横梁中朝向电子元件存储盒30的一面。其中,可移动横梁上布置一对或多对夹板,以夹持一个或多个电子元件存储盒30,通过升降机构40a实现对一个或多个电子元件存储盒30的升降调节。
43.值得注意的是,本发明实施例的升降机构40a中通过移动横梁纵向移动时,载台10的位置固定,比如,升降机构40a带动电子元件存储盒30由位置p’移动至位置p时,载台10仍位于位置p’处。当然,在部分实施例中,移动横梁纵向移动时夹持件同时带动存储盒30和载台10进行纵向移动。
44.如此,本发明实施例通过移动横梁沿着纵梁41上配置的移动轨道410纵向移动时,带动片库接口板20和电子元件存储盒30进行纵向移动,以快速且有效地将片库接口板20的第二活动开口201和电子元件存储盒30的第一活动开口301调整至目标位置处,便于机器手伸入电子元件存储盒30中。可见,本发明实施例的升降机构40a结构简单,便于操作,不仅能够快速、稳定且有效地将电子元件的传送接口(即电子元件存储盒30的第一活动开口301与对应的片库接口板20的第二活动开口201)移动至便于机器手操作的位置,而且节约了设备制造成本。
45.结合图3和图4进行说明,在另一个具体实施例中,升降机构40b中的移动件401b配置为纵向布置于纵梁41上的牵引件,升降机构40b中的固定件402b配置为布置于牵引件上且用于固定电子元件存储盒30的钩持件,具体地,钩持件通过钩持电子元件存储盒30的拉手302实现对电子元件存储盒30的固定。纵梁41上构造有横向布置的定位梁404,牵引件布置于定位梁404上。
46.本发明实施例的牵引件可以为牵引绳、牵引链等,以通过牵引件的牵引实现片库接口板20和电子元件存储盒30的纵向移动。需要说明的是,本发明实施例的升降机构40b可与安装于半导体设备100的半导体设备前端模块efem顶端的微型空中走行式无人搬送(overhead hoist transfer,简称oht)系统进行互动连接,以通过oht系统控制牵引件对片库接口板20和电子元件存储盒30的位置进行升降调节。其中,本发明实施例可配置有多组牵引件,以通过多组牵引件实现对多个电子元件存储盒30的升降调节。
47.可以理解的是,牵引件带动片库接口板20和电子元件存储盒30纵向移动,电子元件存储盒30的第一活动开口301以及对应的第二活动开口201移动至p1位置(当然也可以是p1与p1’之间的任意位置)时,载台10仍然位于p1’位置处。即与图1中的实施例相同部分的是,牵引件带动电子元件存储盒30纵向移动时载台10的位置固定。当然,在部分实施例中,电子元件存储盒30和载台10均可与牵引件连接,以通过牵引件同时带动片库接口板20、电子元件存储盒30与载台10进行纵向移动。
48.如此,本发明实施例通过牵引件带动电子元件存储盒30在位置p1与位置p1’之间纵向移动,以快速有效地将片库接口板20的第二活动开口201和电子元件存储盒30的第一活动开口301调整至目标位置处,便于机器手伸入电子元件存储盒30中。可见,本发明实施例的升降机构40b结构简单,便于操作,能够快速、稳定且有效地将电子元件的传送接口(即电子元件存储盒30的第一活动开口301移动至便于机器手操作的位置,而且还节约了设备制造成本。
49.如图5所示,在再一个具体实施例中,升降机构40c中的移动件401c配置为移动滑
板,移动滑板与片库接口板20紧贴布置,且载台10与片库接口板20紧贴布置,移动滑板沿纵梁41纵向移动时同时带动片库接口板20、电子元件存储盒30以及载台10纵向移动。其中,移动滑板配置有与第二活动开口201相对的窗口201’。
50.当然,移动滑板上还可布置有固定板405,片库接口板20布置于固定板405上,且固定板405配置有与第二活动开口201相对的窗口405’,以供机器手伸入至电子元件存储盒30。需要说明的是,固定板405可以固定一个或多个电子元件存储盒30,以通过升降机构40c的升降操作实现对一个或多个电子元件存储盒30的升降调节。固定板405以及移动滑板中与各个电子元件存储盒30的第一活动开口301的相对位置处对应布置窗口405’,窗口201’,以便于机器手分别伸入至各个电子元件存储盒30中对电子元件执行抓取等操作。
51.如此,本发明实施例通过移动滑板沿着纵梁41上配置的移动轨道410纵向移动(在位置p2与位置p2’之间移动)时,布置于移动滑板上的固定板405同时带动片库接口板20、电子元件存储盒30以及载台10进行纵向移动,以快速且有效地将片库接口板20的第二活动开口201和电子元件存储盒30的第一活动开口301调节至目标位置处,便于机器手伸入电子元件存储盒30中。可见,本发明实施例的升降机构40c结构简单,便于操作,不仅能够快速、稳定且有效地将电子元件的传送接口(即电子元件存储盒30的第一活动开口301)、电子元件载入端(即载台10)移动至便于机器手操作的位置,而且还节约了设备制造成本。
52.需要说明的是,本发明实施例中所涉及的纵向或垂直均是指图1、图3、图5中的z轴方向,本发明实施例中的横向方向是指图1、图3、图5中的x轴方向。
53.结合1至图6进行说明,本发明实施例还提供一种半导体设备100,包括:半导体设备前端模块100’;以及,上述任一项实施例所述的载入装置,载入装置布置于半导体设备前端模块100’的正面100a,通过升降机构(升降机构40a,升降机构40b,升降机构40c)的纵向移动同时带动片库接口板20和电子元件存储盒30纵向移动以调节片库接口板20的第二活动开口201和电子元件存储盒30的第一活动开口301的垂直位置。
54.应理解,半导体设备前端模块100’的正面100a配置设有窗口1000的正面门板100a’以及可以上下移动的片库接口板20;片库接口板20配置有与电子元件存储盒30的第一活动开口301相对的第二活动开口201,片库接口板20的第二活动开口201处配置有第二门板(图中未示出),第二门板与电子元件存储盒30的第一活动开口301处配置的第一门板(图中未示出)相吸附,以使片库接口板20与电子元件存储盒30同时在升降机构的作用下实现纵向移动,从而通过升降机构将片库接口板20的第二活动开口201和电子元件存储盒30的第一活动开口301调节至目标位置处,以便于机器手从半导体设备前端模块100’的背面100b通过正面门板100a’的窗口1000、片库接口板20的第二活动开口201、电子元件存储盒30的第一活动开口301伸入电子元件存储盒30内抓取电子元件。
55.其中,机器手通过升降机构中所设置的与片库接口板20的第二活动开口201对应的窗口伸入至电子元件存储盒30的详细过程可参见上述实施例中关于半导体设备的载入装置的实施例部分,在此不再详细赘述。
56.由此可见,本发明实施例的半导体设备100通过载入装置中升降机构即可快速且有效地将电子元件存储盒30的垂直位置调节至便于机器手伸入其中的目标位置。不仅解决了现有技术中需要额外大型移动平台设备以实现机器手臂整体或部分沿垂直方向的长距离移动而导致成本较高的问题,而且还提高了电子元件的传送接口与机器手臂在垂直方向
上的匹配效率和可靠性。
57.需要说明的是,本发明实施例的半导体设备100中与上述任一项实施例所述的半导体设备的载入装置相同或相似的部分,可参见上述实施例中关于半导体设备的载入装置,在此不做详细赘述。
58.上文所列出的一系列的详细说明仅仅是针对本发明的可行性实施方式的具体说明,它们并非用以限制本发明的保护范围,凡未脱离本发明技艺精神所作的等效实施方式或变更均应包含在本发明的保护范围之内。
59.此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。