1.本公开属于餐饮技术领域,具体来说涉及一种自动配餐系统。
背景技术:
2.随着科技的发展,餐饮领域也逐渐开始采用更智能的方式来替代人工。例如,在点餐环节,传统的方式是人工点餐,由服务员手动记录客人所点菜品,后来变为由服务员用智能设备来选择菜品,现在已经大规模使用二维码自助点餐或者直接将点餐用智能设备给客人使用,由客人自己点餐。又如,随着机器人技术的发展,当菜品做好后,可以使用移动机器人来将餐品运送到客人的餐桌前。现有技术中的上述进展减少了人工出错的可能,也降低了人力成本,同时因为减少了人员接触而降低了疾病传染的风险。但是,目前的环节中仍然存在大量的人工参与环节。
技术实现要素:
3.基于此,有必要提供一种自动配餐系统,以解决现有技术中存在的上述问题中至少一个。
4.为此,本公开提出一种自动配餐系统,包括:
5.主输送线;
6.食品容器存放单元,用于存放食品容器;
7.食品容器转运装置,用于将所述食品容器存放单元中的所述食品容器放置到所述主输送线上;
8.食品分配装置,用于将预定的食品分配到位于所述主输送线上的所述食品容器中;
9.餐盘提供装置,用于提供餐盘;
10.食品容器汇集装置,用于将装有所述预定的食品属于同一订单的食品容器汇集到同一个餐盘中。
11.根据本公开的自动配餐系统,能够实现整个配餐流程的自动化,顾客从下单预定到取餐都无需人工参与,降低了人力成本,提高了配餐效率,避免了人工配餐可能会出现的错误,也避免了人工配餐过程中与食品的接触而可能导致的卫生问题。
12.根据本公开的一个方面,所述食品容器包括餐篮,所述食品容器转运装置包括餐篮转运装置,所述餐篮转运装置用于将所述餐篮放置到所述主输送线上。根据该方面,通过设置餐篮,能够将不同种类的食品分别放置在不同的餐篮中,从而避免不同的食品彼此混合。
13.根据本公开的一个方面,所述食品容器转运装置还包括餐篮纸分配装置,所述餐篮纸分配装置用于将餐篮纸放置到位于所述主输送线上的所述餐篮中。根据该方面,通过设置餐篮纸,能够避免食品直接与餐篮接触,有利于使用完毕后餐篮的清洁。
14.根据本公开的一个方面,所述食品容器转运装置包括升降机构、旋转机构以及拾
取臂,所述升降机构与所述旋转机构连接,所述升降机构用于驱动所述旋转机构升降;所述旋转机构与所述拾取臂连接,所述旋转机构用于驱动所述拾取臂转动。根据该方面,由于在自动配餐过程中,食品容器会不断被取用以及被补充,这导致食品容器的数量及高度发生变化,因此设置升降机构能够适应食品容器的数量变化。
15.根据本公开的一个方面,还包括餐盘输送线,用于输送所述餐盘;
16.所述餐盘输送线与所述主输送线相交,所述食品容器汇集装置设置于所述餐盘输送线与所述主输送线相交处。根据该方面,能够提供餐盘的自动输送,从而使得预定了多种食品的顾客用餐盘将食品方便地取走。
17.根据本公开的一个方面,还包括检测机构,用于检测所述食品容器存放单元中存放的所述食品容器的数量。根据该方面,能够检测食品容器的数量,从而当数量不足时提醒人工进行补充或者自动补充食品容器。
18.根据本公开的一个方面,所述主输送线包括多个区段,其中,在不同区段中的所述主输送线分别包括至少一条输送线,在不同区段中的所述输送线的条数相同或者不同。根据该方面,考虑到在不同的区段中所涉及的食品的种类、数量及体积不同,且不同区段所对应的食品的需求量不同,因此设置不同的区段并在不同的区段设置根据需要来设定一定数量的输送线,能够满足不同区段的需求,避免订单积压。
19.根据本公开的一个方面,还包括餐盘纸分配装置,用于在所述餐盘上放置餐盘纸。根据该方面,能够在餐盘上放置餐盘纸,从而进一步保证餐盘的清洁。
20.根据本公开的一个方面,所述食品容器汇集装置根据所述预定的食品的预定顺序对所述食品容器进行汇集。根据该方面,能够根据订单的预定顺序来汇集食品,保证订单的先订先得,提高顾客用餐感受和满意度。
附图说明
21.从以下对优选实施例的说明以及结合附图得到本公开的其它优点、特征和细节。之前在说明书中提到的特征和特征组合以及以下在附图说明中提到的和/或在图中单独示出的特征和特征组合不仅在各自所说明的组合中、也在其它组合中或单独地可采用,而没有脱离本公开范围。在附图中:
22.图1示意性地示出了本公开的自动配餐系统的原理性构成图。
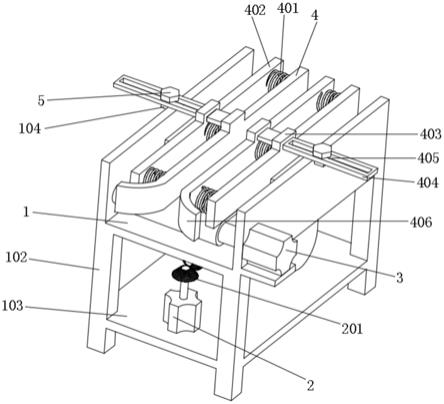
23.图2示意性地示出了本公开的自动配餐系统的餐篮转运装置的一种实施方式的立体图。
24.图3示意性地示出了本公开的自动配餐系统的餐篮转运装置的一种实施方式的俯视图。
25.图4示意性地示出了餐篮转运装置和餐篮纸分配装置集成模块的立体图。
26.附图仅是示意性的,且并不一定按比例绘制,此外它们仅示出为了阐明本公开所必需的那些部分,而其他部分可能被省略或仅仅简单提及。即,除附图中所示出的部件外,本公开还可以包括其他部件。
具体实施方式
27.虽然将参照含有本公开的较佳实施例的附图充分描述本公开,但在此描述之前应
了解本领域的普通技术人员可修改本文中所描述的公开,同时获得本公开的技术效果。因此,须了解本文中的描述对本领域的普通技术人员而言为一广泛的揭示,且其内容不在于限制本公开所描述的示例性实施例。
28.另外,在下面的详细描述中,为便于解释,阐述了许多具体的细节以提供对本公开实施例的全面理解。然而明显地,一个或多个实施例在没有这些具体细节的情况下也可以被实施。在其他情况下,公知的结构和装置以图示的方式体现以简化附图。
29.图1示出了本公开的自动配餐系统的整体结构图。根据本公开的自动配餐系统,能够实现全流程的自动化配餐。以下结合图1对本公开的自动配餐系统的整体结构进行说明。
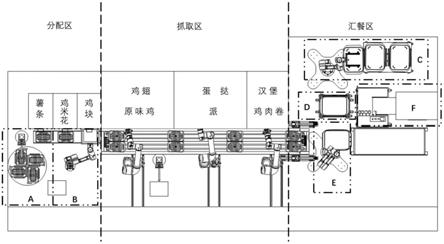
30.如图1所示,针对快餐行业的特点,本公开的自动配餐系统可以分为分配区、抓取区、汇餐区。
31.本公开的自动配餐系统从自动抓取餐篮或又称为餐盘或诸如此类的用于盛放食品的食物容器开始。在该区域中,设置有餐篮转运装置a、餐篮纸分配装置b、餐品分配装置以及输送线。在接收到订单后,餐篮转运装置将根据订单分配指定数量的餐篮,并将餐篮移动至传送装置上,餐篮纸分配装置b将餐篮纸放置到餐篮上,随后餐篮在输送线上被移动,当餐篮经过相应的食品储存点时,根据客户的订单来向餐篮中加入对应的食品。
32.在图1中最左侧的分配区,主要用于分装小块的产品,如薯条、鸡米花、鸡块等。如果本公开的自动配餐系统并不用于快餐业而是用于其他餐饮业例如中餐馆,则分配区可以分配例如炒花生米、宫保鸡丁等菜品。分配食物的装置可以采用多种形式,例如采用片状结构来拨动食品,或者采用勺状部件来盛取对应数量的食品,当然也可以采用倾斜食品存储装置的方式来实现,只要能够实现对食物的定量分配即可。
33.当餐篮在输送线上被移动到抓取区后,对应的食品被放置到餐篮中。抓取区用于较大的餐品配餐,例如是炸鸡翅、汉堡、鸡排等,或者例如是馒头、花卷、包子、鸡蛋或者其他形式的可以抓取的食品。本区由餐品存放装置、餐篮纸分配装置、传送装置、餐品取拿装置组成。餐品存放装置分为不同区域,用于存放不同餐品。当输送线上的餐篮移动到指定餐品存放装置处后,餐篮纸分配装置给指定餐篮铺上餐篮纸,取拿装置到指定存放位置进行餐品取拿,并将餐品放置于指定餐篮内。
34.当然,在抓取区也可以不设置餐篮纸分配装置,而是可以由分配区的餐篮纸分配装置在分配区就将放置在输送线上的所有餐篮中都放置好餐篮纸。
35.在图1中,分配区的输送线为单线形式的输送装置,在抓取区则采用双线形式的输送装置。这是考虑到分配区作为刚开始分配食品的地方,对订单依次处理,只需单线即可,而到了抓取区,需要输送的食品数量增加,因此设置成双线形式。这仅仅是一种示例性的方式,本领域技术人员可以根据订单数量、配餐区域面积等来进行适应性调整。
36.随后,输送线上的餐篮被输送至汇餐区,以便汇集已经配好的餐品,将其汇集到一个餐盘中,以提供给相应的客人。在本区中设置有餐盘分配区域c、餐盘纸分配区域d、餐篮汇集区域e组成。餐盘分配装置用于分配餐盘,餐纸分配装置用于将餐纸铺至餐盘内。同一订单的餐品备好后,汇集于汇餐区,并由汇集装置将餐篮推进于指定餐盘内。
37.可选地,在汇餐区还可以包括饮料分配区域f,用于根据客户的订单信息来分配饮料,并将饮料放置到餐盘中。
38.配好餐品的餐盘由输送线送至出餐区,供客人取用。
39.进一步地,还可以将输送线上的餐盘直接输送到移动机器人上,并有移动机器人将餐盘运送至相应的餐桌处。
40.以上是对本公开的自动配餐系统的核心构思的说明。下面针对各个部分的可行的具体实施方式进行说明。
41.图2是本公开的自动配餐系统的餐篮转运装置的一种实施方式的立体图,图3则示出了图2中的餐篮转运装置的俯视图。结合图2和图3可以看出,众多数量的餐篮4堆叠设置在支撑部件2上,为了在有限的空间内放置更多数量的餐篮4,餐篮4被摆放成多摞。具体地,图3示出了4摞堆叠的餐盘41、42、43和44。在支承部件2的旁边设置有转运单元1,用于从堆叠设置的多个餐盘4中拾取餐盘,并将其运送至目标位置,也就是图3中所示的输送线5。转运单元1例如可以包括升降机构、旋转机构以及拾取臂,通过升降机构降低拾取臂,以使得拾取臂的一端与餐篮4接触;随后将拾取臂与餐篮4固定,例如可以通过采用吸盘吸附或者电磁铁吸附等形式来将餐篮固定到该端,随后旋转机构驱动拾取臂旋转,当餐篮被运送到输送线上时,拾取臂将餐篮放下。
42.作为一种具体的实施方式,所述升降机构与所述旋转机构连接,用于驱动所述旋转机构升降;所述旋转机构与所述拾取臂连接,并用于驱动所述拾取臂转动。
43.餐篮转运装置还包括底座3,该底座用于支撑和固定转运单元1和支承部件2。转运单元1和支承部件2例如可拆卸地安装在该底座上,这样在现场可以不用重新调整尺寸,只需将转运单元1和支承部件2直接安装在底座上即可,因而有利于餐篮转运装置的模块化,并降低在现场的布置成本。
44.餐篮纸分配装置也可以采用类似结构的来实现。当然,在图1中,餐篮转运装置a和餐篮纸分配装置b采用了单独的模块。在具体实施时,也可以将餐篮转运装置a和餐篮纸分配装置b设置成一个共同的模块。图4示出了一种示意性的结构。
45.参见图4,餐篮转运装置a和餐篮纸分配装置b被集成为一个模块。具体地,转运单元1上设置有第一拾取臂101和第二拾取臂102,第一拾取臂101可以用于拾取餐篮4,而第二拾取臂102则可以用于拾取餐篮纸7。在第二拾取臂102上设置有餐篮纸拾取装置6,用于拾取餐篮纸7。餐篮纸拾取装置6可以采用吸盘的形式。考虑到餐篮纸的柔性结构,在图4中示出了4个吸盘以拾取餐篮纸。
46.在工作时,首先旋转机构带动拾取臂沿一个方向转动至第一位置处,然后通过升降机构降低拾取臂,由第一拾取臂101拾取位于第一位置处的餐篮4;然后旋转机构带动拾取臂继续沿该方向转动至第二位置处,以将所拾取的餐篮4释放到第二位置处;随后旋转机构带动拾取臂反向转动至第三位置处,然后通过升降机构降低拾取臂,由第二拾取臂102拾取位于第三位置处的垫纸7,最后旋转机构带动拾取臂继续反向转动至第四位置处,以将所拾取的垫纸释放到由第一拾取臂101释放的餐篮4中。
47.根据本公开的一个优选实施方式,可以将对餐篮和餐篮纸的数量进行检测,当数量少于预设值时,通过声光提示的方式提醒工作人员补充相应的餐篮或餐篮纸。这可以通过设置重量传感器来检测餐篮或餐篮纸的重量、设置光电传感器来检测餐篮或餐篮纸的高度等方式来实现。
48.在抓取区的食品可以通过机械手抓取。由于餐篮和餐篮纸已经就位,因此在该区域直接将所抓取的食品根据订单来放置到相应的餐篮上即可。当然,考虑到某些食品例如
汉堡等可能已经被装载包装盒内,因此不需要餐篮纸,在分配区时并不一定需要所有的餐篮中都放置餐篮纸。
49.此外,也可以在抓取区设置另外的餐篮转运装置,以应对客户订单中仅包含抓取区的食品的情况。在此情况下,可以直接从抓取区拾取餐篮,而无需等待餐篮从分配区输送过来。相应地,该区域也可以设置餐篮纸分配装置。
50.当餐篮进入汇餐区后,分属相同订单的多个餐篮将被放置到同一个餐盘中。由图1可知,在餐盘分配区域c中将餐盘移动到输送线上,并在餐盘纸分配区域d中通过餐盘纸分配装置将餐盘纸分配到餐盘上,当餐盘被运送到餐篮汇集区域e时,分属相同订单的多个餐篮将被放置到同一个餐盘中。
51.移动餐盘的装置和分配餐盘纸的装置可以采用与移动餐篮和移动餐篮纸类似的装置。
52.另外,如前所述,还可以设置饮料分配区域f,以将客人所点的饮料运送到餐盘上。
53.本领域的技术人员可以理解,上面所描述的实施例都是示例性的,并且本领域的技术人员可以对其进行修改,各种实施例中所描述的结构在不发生结构或者原理方面的冲突的情况下可以进行自由组合。
54.在详细说明本公开的较佳实施例之后,熟悉本领域的技术人员可清楚地了解,在不脱离随附权利要求的保护范围与精神下可进行各种变化与改变,且本公开亦不受限于说明书中所举示例性实施例的实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。