1.本公开涉及屏蔽门技术领域,具体地,涉及一种用于射频识别的屏蔽门及其门体、仓储管理系统。
背景技术:
2.射频识别(radio frequency identification,rfid)是自动识别技术的一种,通过无线射频方式进行非接触双向数据通信,利用无线射频方式对记录媒体(电子标签或射频卡)进行读写,从而达到识别目标和数据交换的目的。rfid通过无线电波不接触快速信息交换和存储技术,通过无线通信结合数据访问技术,然后连接数据库系统,加以实现非接触式的双向通信,从而达到识别的目的,用于数据交换,串联起一个极其复杂的系统。根据通信距离,可分为近场和远场,为此读/写设备和电子标签之间的数据交换方式也对应地被分为负载调制和反向散射调制。
3.完整的rfid系统包括:阅读器、天线、电子标签也就是所谓的应答器、软件系统几部分所组成。目前,在rfid实际运用中,天线基本都采用完全固定的方式,而货物上的电子标签会随着货物的移动而位置不同,但固定的天线的读取范围有限,会造成电子标签的读取率低和准确率低的情况,若需要增加固定的天线的读取范围,通常采用的手段是增大天线功率,但增大功率后容易造成串读区域扩大,导致空间浪费。
技术实现要素:
4.本公开的目的是提供一种用于射频识别的屏蔽门及其门体、仓储管理系统,该屏蔽门门体能够避免天线出现漏读,提高天线的读取率。
5.为了实现上述目的,本公开提供一种用于射频识别的屏蔽门门体,所述屏蔽门门体包括壳体,所述壳体还包括底壁和围板,所述围板围绕所述底壁的边缘设置,所述底壁用于安装天线,所述壳体包括电磁屏蔽层,所述门体包括第一门体和第二门体,所述第一门体和所述第二门体相对间隔设置,以在其间形成供货物通过的货物通道。
6.可选地,所述屏蔽门门体还包括移动机构和驱动装置,所述移动机构具有用于相对于所述壳体位置可调节的安装座,用于安装天线,所述驱动装置与所述移动机构传动相连,用于驱动所述移动机构以使得所述安装座相对于所述壳体移动。
7.可选地,所述移动机构包括竖直牵引机构和水平牵引机构,所述竖直牵引机构和水平牵引机构中的第一者可调节地设置在所述壳体上,第二者可调节地设置在所述第一者上,所述安装座设置所述第二者上,以实现所述安装座相对于所述壳体在竖直方向和水平方向上的移动。
8.可选地,所述竖直牵引机构包括活动托板、导轨和第一牵引件,所述驱动装置包括第一致动件,所述导轨布置在所述壳体上,且沿竖直方向延伸布置,所述活动托板构造为沿水平方向布置的长条板,且可移动地配合于所述导轨,所述第一致动件设置在所述导轨上,并且所述第一牵引件的一端与所述第一致动件相连,另一端与所述活动托板相连,所述第
一致动件通过所述第一牵引件带动所述活动托板相对于所述导轨移动,所述安装座沿水平方向可滑移地设置在所述活动托板上。
9.可选地,所述水平牵引机构包括第二牵引件,所述驱动装置包括第二致动件,所述第二致动件设置在所述活动托板的端部,所述第二牵引件的一端与所述第二致动件相连,另一端与所述安装座相连,所述第二致动件通过所述第二牵引件带动所述安装座相对于所述活动托板移动。
10.可选地,所述屏蔽门还包括角度调节机构,用于将所述天线安装在所述安装座上,以调节所述天线相对于所述壳体的倾斜角度。
11.可选地,所述角度调节机构包括调节基座、俯仰活动件和摆动活动件,所述调节基座设置在所述安装座上,所述俯仰活动件可竖直转动地设置在所述调节基座上,以带动所述天线沿竖直方向做俯仰运动,所述摆动活动件可水平转动地设置在所述俯仰活动件上,以带动所述天线沿水平方向做水平摆动。
12.可选地,所述俯仰活动件包括第一活动主体、第一转轴和俯仰致动件,所述调节基座构造为分别位于所述第一活动主体两侧的板状,所述第一转轴的两端分别固定在所述调节基座上且沿水平方向布置,所述第一活动主体可转动地设置在所述第一转轴上,所述俯仰致动件用于驱动所述第一活动主体相对于所述第一转轴转动。
13.可选地,所述调节基座上形成有第一弧形滑道,所述第一弧形滑道的圆心与所述第一转轴重合,所述俯仰致动件固定在所述调节基座上,所述第一活动主体上还设置有第一拨杆和第一摇臂,所述第一拨杆穿过所述第一弧形滑道并与所述第一摇臂的一端相连,所述第一摇臂的另一端与所述俯仰致动件的输出端相连,所述俯仰致动件通过所述第一摇臂带动所述第一拨杆沿所述第一弧形滑道来回移动。
14.可选地,所述摆动活动件包括第二活动主体、第二转轴和摆动致动件,所述俯仰活动件上还设置有分别位于所述第二活动主体两侧的支撑部,所述第二转轴的两端分别固定在所述支撑部上且沿竖直方向布置,所述第二活动主体可转动地设置在所述第二转轴上,所述摆动致动件用于驱动所述第二活动主体相对于所述第二转轴转动。
15.可选地,所述第二活动主体上形成有第二弧形滑道,所述第二弧形滑道的圆心与所述第二转轴重合,所述摆动致动件固定在所述第二活动主体上,所述第二活动主体上还设置有第二拨杆和第二摇臂,所述第二拨杆固定在所述支撑部并穿过所述第二弧形滑道与所述第二摇臂的一端相连,所述第二摇臂的另一端与所述摆动致动件的输出端相连,所述摆动致动件通过所述第二摇臂带动所述第二拨杆沿所述第二弧形滑道来回移动。
16.可选地,所述第二活动主体上还形成有固定部,所述固定部上开设有过线孔,所述过线孔用于限位所述天线的线束,以将所述天线固定在所述固定部上。
17.可选地,所述门体还包括高度传感器和位置传感器,所述高度传感器沿竖直方向设置在所述门体的所述围板上,用于检测所述货物通道中的货物的高度,所述位置传感器沿水平方向布置在所述壳体上,用于检测所述货物通道中的货物的位置。
18.可选地,所述门体还包括走线支架,所述走线支架包括布线横梁和分别位于所述布线横梁两端的第一安装支脚和第二安装支脚,所述第一安装支脚高度可调地设置在所述第一门体的顶部,所述第二安装支脚高度可调地设置在所述第二门体的顶部。
19.本公开的另一方面还提供一种用于射频识别的屏蔽门,所述屏蔽门包括如上所述
的用于射频识别的屏蔽门门体,所述屏蔽门还包括天线和阅读器,所述天线设置在所述移动机构上,所述阅读器设置在所述壳体的外侧面并与所述天线信号相连,所述天线用于获取经过所述屏蔽门的货物上的电子标签的信号并将所述信号传递给所述阅读器。
20.本公开的又一方面还提供一种仓储管理系统,所述仓储管理系统包括托运容器、传送装置和如上所述的用于射频识别的屏蔽门,所述托运容器用于承托货物,所述货物上设置有电子标签,所述传送装置设置在经过所述屏蔽门的通道上,所述托运容器设置在所述传送装置上,所述传送装置用于将所述托运容器从所述屏蔽门的门体的识别起始侧运送至识别终止侧。
21.通过上述技术方案,本公开实施例中的屏蔽门门体的壳体构造为盒状结构,且整个壳体包括电磁屏蔽层,能够从天线的后面和侧面屏蔽天线的信号以及屏蔽外部信号对天线的影响,使天线的信号从门体的正面发出,避免出现天线串读的现象。第一门体和第二门体相对设置,能够将天线发出的信号限制在货物通道内,且可以避免外部信号对天线发出的信号的影响,提高读取准确率。两个门体内的天线均可以读取经过货物通道8的货物,且两个门体读取的货物的信号可以相互比对,以判断是否出现误读等现象。
22.本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
23.附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
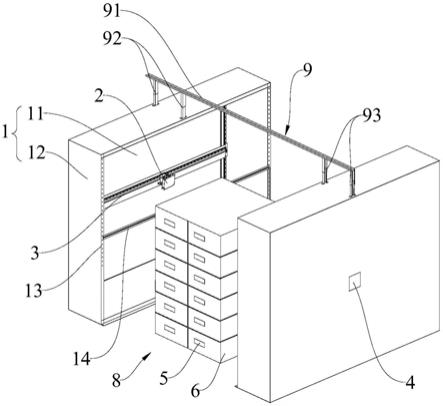
24.图1是本公开实施例中的仓储管理系统的结构示意图;
25.图2是本公开实施例中的用于射频识别的屏蔽门门体的结构示意图;
26.图3是图2中区域a的局部放大图;
27.图4是图2中区域b的局部放大图;
28.图5是本公开实施例中的角度调节机构和天线的结构示意图;
29.图6是本公开实施例中的角度调节机构和天线的爆炸示意图。
30.附图标记说明
31.1、壳体;11、底壁;12、围板;13、高度传感器;14、位置传感器;2、天线;21、螺纹柱;3、移动机构;31、安装座;32、竖直牵引机构;321、活动托板;322、第一致动件;323、第一牵引件;33、水平牵引机构;331、第二致动件;332、第二牵引件;34、导轨;4、阅读器;5、电子标签;6、托运容器;7、角度调节机构;71、调节基座;711、第一弧形滑道;72、俯仰活动件;721、第一活动主体;722、第一拨杆;723、第一摇臂;724、第一转轴;725、俯仰致动件;726、支撑部;73、摆动活动件;731、第二活动主体;732、第二转轴;733、摆动致动件;734、第二拨杆;735、第二摇臂;736、固定部;737、过线孔;738、第二弧形滑道;8、货物通道;9、走线支架;91、布线横梁;92、第一安装支脚;93、第二安装支脚。
具体实施方式
32.以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
33.在本公开中,在未作相反说明的情况下,使用的方位词如术语名词“竖直方向、水
平方向”是以地面为基准定义的,竖直方向是指平行于重力的方向,水平方向是指垂直于重力的方向。“上、下”是指产品处于使用时惯常摆放的方位或位置关系,可以理解为沿重力方向的上、下,也与竖直方向相对应。“内、外”是指相对于部件或结构本身轮廓的“内、外”。此外,需要说明的是,所使用的术语如“第一”“第二”等是为了区别一个要素和另一个要素,不具有顺序性和重要性。另外,在参考附图的描述中,不同附图中的同一标记表示相同的要素。
34.本公开实施例提供一种用于射频识别的屏蔽门门体,如图1至图6所示,该屏蔽门门体包括壳体1,壳体1包括底壁11和围板12,围板12围绕底壁11的边缘设置,底壁11用于安装天线2,壳体1包括电磁屏蔽层,门体包括第一门体和第二门体,第一门体和第二门体相对间隔设置,以在其间形成供货物通过的货物通道8。
35.通过上述技术方案,壳体1构造为盒状结构,且整个壳体1包括电磁屏蔽层,能够从天线2的后面和侧面屏蔽天线2的信号以及屏蔽外部信号对天线2的影响,使天线2的信号从门体的正面发出,避免出现天线2串读的现象。第一门体和第二门体相对设置,能够将天线2发出的信号限制在货物通道8内,且可以避免外部信号对天线2发出的信号的影响,提高读取准确率。两个门体内的天线2均可以读取经过货物通道8的货物,且两个门体读取的货物的信号可以相互比对,以判断是否出现误读等现象。
36.其中,第一门体和第二门体结构和高度或宽度尺寸可以相同,也可以不同,本公开对此不作限制。上述电磁屏蔽层可以是壳体1本身由电磁屏蔽材料制成,也可以是在壳体1上贴覆的具有电磁屏蔽的覆膜层,本公开对此不作限制。
37.在本公开实施例中,该屏蔽门门体包括移动机构3和驱动装置,移动机构3具有用于相对于壳体1位置可调节的安装座31,用于安装天线2,驱动装置与移动机构3传动相连,用于驱动移动机构3以使得安装座31相对于壳体1移动。
38.该屏蔽门门体可以应用于检测和扫描经过屏蔽门的货物,在应用时,屏蔽门门体的安装座31能够承装天线2,天线2用于向货物发送信号,驱动装置能够驱动安装座31相对于壳体1移动,这样可以使得安装座31上的天线2更靠近货物,或者跟随货物移动,提高读取率。
39.通过上述技术方案,本公开实施例中的屏蔽门门体设置有移动机构3和驱动装置,驱动装置能够驱动移动机构3移动,移动机构3具有安装天线2的安装座31,能够带动天线2跟随经过屏蔽门的货物并读取其信息,避免出现漏读等现象,提高天线2的读取率。由于移动机构3能够带动天线2移动,则通过一个天线2即可满足屏蔽门的读取要求,可以减少不必要的天线2数量,降低天线2功率,并且一个天线2不会出现串读现象,提高场地的利用率。
40.在本公开实施例中,如图1和图2所示,移动机构3包括竖直牵引机构32和水平牵引机构33,竖直牵引机构32和水平牵引机构33中的第一者可调节地设置在壳体1上,第二者可调节地设置在第一者上,安装座31设置第二者上,以实现安装座31相对于壳体1在竖直方向和水平方向上的移动。其中,第一者是指竖直牵引机构32和水平牵引机构33中的任一者,第二者是指竖直牵引机构32和水平牵引机构33中的另一者。通过竖直牵引机构32单独作用能够驱动安装座31沿竖直方向移动,水平牵引机构33单独作用能够驱动安装座31沿水平方向移动,竖直牵引机构32和水平牵引机构33共同作用可以驱动安装座31相对于壳体1做平面移动,例如,可以驱动安装座31在水平方向上做正弦波移动。通过竖直牵引机构32和水平牵
引机构33能够实现安装座31的大部分移动轨迹,并在跟随货物移动的过程中还能对货物上下进行扫描,使天线2的读取信号的范围能够覆盖货物的高度,有利于提高读取率。
41.在本公开的一种示例中,上述竖直牵引机构32可以可调节地设置在壳体1上,水平牵引机构33可以可调节地设置在竖直牵引机构32上;在本公开的另一种示例中,上述水平牵引机构33可以可调节地设置在壳体1上,竖直牵引机构32可以可调节地设置在水平牵引机构33上,本公开对此不作限制。
42.下面将结合图2至图4详细介绍竖直牵引机构32和水平牵引机构33。具体地,如图2和图3所示,竖直牵引机构32包括活动托板321、导轨34和第一牵引件323,驱动装置包括第一致动件322,导轨34布置在壳体1上,且沿竖直方向延伸布置,活动托板321构造为沿水平方向布置的长条板,且可移动地配合于导轨34,第一致动件322设置在导轨34上,并且第一牵引件323的一端与第一致动件322相连,另一端与活动托板321相连,第一致动件322通过第一牵引件323带动活动托板321相对于导轨34移动,安装座31沿水平方向可滑移地设置在活动托板321上。活动托板321能够沿导轨34在竖直方向移动,从而带动活动托板321上的安装座31沿竖直方向移动,通过设置第一牵引件323和第一致动件322,能够实现活动托板321的自动移动,无需人工参与调节,使用方便。
43.示例地,在本公开实施例中,导轨34可以为两条,分别设置在活动托板321的两端,使活动托板321的两端只具有竖直方向的自由度,能够提高活动托板321移动的平稳性。但在本公开其他实施方式中,导轨34也可以为其他数量,例如一条导轨34、三条导轨34、四条导轨34等,分别间隔设置在壳体1上,使活动托板321与导轨34有一个或多个配合点,本公开对此不作限制。
44.另外,上述第一牵引件323可以是同步带、链条、齿轮齿条或丝杠螺母等,只要是能够将第一致动件322的输出运动转换为活动托板321的直线运动即可,本公开对此不作限制。上述第一致动件322可以是电机、马达等,本公开对此不作限制。
45.如图2和图4所示,在本公开实施例中,水平牵引机构33包括第二牵引件332,驱动装置包括第二致动件331,第二致动件331设置在活动托板321的端部,第二牵引件332的一端与第二致动件331相连,另一端与安装座31相连,第二致动件331通过第二牵引件332带动安装座31相对于活动托板321移动。通过第二牵引件332和第二致动件331能够实现安装座31自动水平移动,操作方便。结合上述竖直牵引机构32,通过控制第一致动件322和第二致动件331的工作速度可以控制安装座31的移动轨迹,自动化程度高。
46.与竖直牵引机构32类似的,上述第二牵引件332可以是同步带、链条、齿轮齿条或丝杠螺母等,只要是能够将第二致动件331的输出运动转换为活动托板321的直线运动即可,本公开对此不作限制。上述第二致动件331可以是电机、马达等,本公开对此不作限制。
47.在本公开实施例中,安装座31可以构造为任意合适的形状,也可以通过任意合适的方式与活动托板321配合,本公开对此不作限制。在本公开的一种示例中,如图5和图6所示,安装座31可以构造为板状,且在安装座31的上端和下端分别形成有限位翻边,该限位翻边分别与活动托板321的上边缘和下边缘限位配合,以使得安装座31仅沿活动托板321的水平方向移动。在本公开的其他实施方式中,安装座31和活动托板321之间也可以通过滑块滑槽的方式配合在一起,本公开对此不作限制。
48.如图5和图6所示,屏蔽门还包括角度调节机构7,用于将天线2安装在安装座31上,
以调节天线2相对于壳体1的倾斜角度。这样,安装座31能够带动天线2偏转到正对货物的方向,能够提高读取货物上的信号的准确率。应理解的是,上述角度调节机构7能够调节天线2的任意方位的角度,也就是能够允许天线2朝向任意方位倾斜。
49.在本公开的一种实施方式中,角度调节机构7包括调节基座71、俯仰活动件72和摆动活动件73,调节基座71设置在安装座31上,俯仰活动件72可竖直转动地设置在调节基座71上,以带动天线2沿竖直方向做俯仰运动,摆动活动件73可水平转动地设置在俯仰活动件72上,以带动天线2沿水平方向做水平摆动。俯仰活动件72和摆动活动件73可以单独运行,也可以同时运行,其中,当两者同时运行时,角度调节机构7的俯仰运动和摆动运动合成,以使得天线2朝向任意倾角转动。
50.在本公开其他实施方式中,俯仰活动件72和摆动活动件73的安装方式可以灵活设计,例如,调节基座71设置在安装座31上,摆动活动件73可竖直转动地设置在调节基座71上,以带动天线2沿水平方向做水平摆动,俯仰活动件72可水平转动地设置在摆动活动件73上,以带动天线2沿竖直方向做俯仰运动,本公开对此不作限制。
51.如图5和图6所示,俯仰活动件72包括第一活动主体721、第一转轴724和俯仰致动件725,调节基座71构造为分别位于第一活动主体721两侧的板状,第一转轴724的两端分别固定在调节基座71上且沿水平方向布置,第一活动主体721可转动地设置在第一转轴724上,俯仰致动件725用于驱动第一活动主体721相对于第一转轴724转动。俯仰活动件72整体传动结构简单,操作方便,且通过第一转轴724连接,通过俯仰致动件725驱动其转动,不容易出现卡滞等现象。
52.在本公开的示例中,调节基座71上形成有第一弧形滑道711,第一弧形滑道711的圆心与第一转轴724重合,俯仰致动件725固定在调节基座71上,第一活动主体721上还设置有第一拨杆722和第一摇臂723,第一拨杆722穿过第一弧形滑道711并与第一摇臂723的一端相连,第一摇臂723的另一端与俯仰致动件725的输出端相连,俯仰致动件725通过第一摇臂723带动第一拨杆722沿第一弧形滑道711来回移动。当俯仰致动件725运行时,能够带动第一摇臂723转动,第一摇臂723拨动第一拨杆722在第一弧形滑道711来回移动,从而带动第一活动主体721相对于第一转轴724转动,实现第一活动主体721的俯仰运动。其中,俯仰致动件725可以是电机或马达等能够输出扭矩的致动件,本公开对此不作限制。
53.如图6所示,第一活动主体721的两侧形成有用于与调节基座71配合的板状,该板状结构形成有与第一转轴724对应的过孔,以及形成有第一拨杆722安装点,第一拨杆722固定在该安装点并穿过第一弧形滑道711与俯仰致动件725相连。
54.如图5和图6所示,本公开实施例中的摆动活动件73包括第二活动主体731、第二转轴732和摆动致动件733,俯仰活动件72上还设置有分别位于第二活动主体731两侧的支撑部726,第二转轴732的两端分别固定在支撑部726上且沿竖直方向布置,第二活动主体731可转动地设置在第二转轴732上,摆动致动件733用于驱动第二活动主体731相对于第二转轴732转动。该摆动活动件73结构也相对简单,操作方便,且通过第二转轴732连接,通过摆动致动件733驱动其转动,不容易出现卡滞等现象。
55.其中,如图6所示,俯仰活动件72的支撑部726可以构造为板状,分别位于第二活动主体731的两侧。
56.另外,如图5和图6所示,第二活动主体731上形成有第二弧形滑道738,第二弧形滑
道738的圆心与第二转轴732重合,摆动致动件733固定在第二活动主体731上,第二活动主体731上还设置有第二拨杆734和第二摇臂735,第二拨杆734固定在支撑部726并穿过第二弧形滑道738与第二摇臂735的一端相连,第二摇臂735的另一端与摆动致动件733的输出端相连,摆动致动件733通过第二摇臂735带动第二拨杆734沿第二弧形滑道738来回移动。当摆动致动件733运行时,能够带动第二摇臂735转动,第二摇臂735拨动第二拨杆734在第二弧形滑道738来回移动,从而带动第二活动主体731相对于第二转轴732转动,实现第二活动主体731的摆动运动。其中,摆动致动件733可以是电机或马达等能够输出扭矩的致动件,本公开对此不作限制。
57.其中,第二活动主体731上形成有与上述俯仰活动件72对接的耳板,第二活动主体731上的第二弧形滑道738形成在该耳板上。
58.在本公开实施例中,如图5和图6所示,第二活动主体731上还形成有固定部736,固定部736上开设有过线孔737,过线孔737用于限位天线2的线束,以将天线2固定在固定部736上。也就是说,天线2的信号线、供电线等各种线束可以穿过该过线孔737,避免角度调节机构7在调整角度的过程中牵扯到线束或者使线束和其他构件发生缠绕等现象,从而保护线束。
59.在本公开实施例中,为了更好的驱动天线2跟随货物移动,如图1和图2所示,门体还包括高度传感器13和位置传感器14,高度传感器13沿竖直方向设置在门体的围板12上,用于检测货物通道8中的货物的高度,位置传感器14沿水平方向布置在壳体1上,用于检测货物通道8中的货物的位置。通过高度传感器13和位置传感器14能够根据货物的高度和移动位置适应性调整天线2的移动轨迹,使天线2的读取范围能够覆盖整个货物,避免货物信息遗漏。
60.如图1所示,两个门体分别需要设置各种信号线束或电源线束,或者两个门体之间也可以彼此建立信号连接,因此,门体还包括走线支架9,走线支架9包括布线横梁91和分别位于布线横梁91两端的第一安装支脚92和第二安装支脚93,第一安装支脚92高度可调地设置在第一门体的顶部,第二安装支脚93高度可调地设置在第二门体的顶部。布线横梁91可以用于固定和引导线束的走向,第一安装支脚92和第二安装支脚93的高度可以调节,以根据实际情况调整布线横梁91的高度,避免布线横梁91对比较高的货物顶部造成阻挡。通过在门体的顶部设置走线支架9,一方面更容易整理线束,另一方面避免地面走线对货物造成止挡,同时避免地面移动物体损坏线束。
61.本公开的另一实施例还提供一种用于射频识别的屏蔽门,继续如图1至图6所示,该屏蔽门包括如上所述的用于射频识别的屏蔽门门体,屏蔽门还包括天线2和阅读器4,天线2设置在移动机构3上,阅读器4设置在壳体1的外侧面并与天线2信号相连,天线2用于获取经过屏蔽门的货物上的电子标签5的信号并将信号传递给阅读器4。由于移动机构3能够驱动天线2相对于门体移动,使天线2能够跟随货物并向货物上的电子标签5发送信号,电子标签5存储有货物信息,电子标签5能够将货物信息反馈给天线2,天线2获取该货物信息后将该货物信息传递给阅读器4进行处理,从而对经过货物通道8的货物进行统计和管理。
62.在本公开的实施例中,天线2形成为平板状,天线2的周缘设置有多个螺纹柱21,天线2通过螺纹柱21可调节地设置在第二活动主体731上,这样,可以通过调节螺纹柱21的连接长度来调节天线2相对于第二活动主体731的间距。
63.本公开的又一实施例还提供一种仓储管理系统,如图1所示,该仓储管理系统包括托运容器6、传送装置和如上所述的用于射频识别的屏蔽门,托运容器6用于承托货物,货物上设置有电子标签5,传送装置设置在经过屏蔽门的通道上,托运容器6设置在传送装置上,传送装置用于将托运容器6从屏蔽门的门体的识别起始侧运送至识别终止侧。
64.其中,托运容器6可以是箱体、托盘、框体等容器,电子标签5可以设置在容器上,也可以设置在货物上,只要能够从容器中露出即可。传送装置可以是传输带、运输小车或其他能够带动货物移动的机构,本公开对此不作限制。
65.此外,为了智能化管理该仓储管理系统,该仓储管理系统还可以包括控制器,以控制移动机构3、天线2、高度传感器13、位置传感器14、传送装置等结构的运行。
66.该仓储管理系统的工作过程大致为:
67.第一步,将货物放置在托运容器6中,传送装置将托运容器6朝向货物通道8运送;
68.第二步,高度传感器13和位置传感器14启动,不断检测货物高度和位置,并将该信息发送至控制器;
69.第三步,控制器控制移动机构3和天线2启动,移动机构3根据货物个高度和位置信息规划跟随路径,并且角度调节机构7根据天线2和货物的位置关系自动调节偏转角度,使天线2朝向货物的电子标签5发送信号;
70.第四步,电子标签5将货物信息反馈至天线2,天线2获取到货物信息后传输给阅读器4;
71.第五步,位置传感器14检测到所有货物通过货物通道8后,控制天线2和移动装置停止工作。
72.以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
73.另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合。为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
74.此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。