1.本公开总体上涉及电荷泵电源,包括但不限于诸如无线电话和媒体播放器的个人音频设备,并且更具体地,涉及用于基于由电荷泵生成的输出电压的阈值来控制电荷泵的可变开关频率的系统和方法。
背景技术:
2.个人音频设备(包括无线电话,诸如移动/蜂窝电话、无绳电话、mp3播放器和其他消费音频设备)被广泛使用。这种个人音频设备可以包括用于驱动一对头戴式受话器或一个或多个扬声器的电路系统。这种电路系统通常包括用于将音频输出信号驱动到头戴式受话器或扬声器的功率放大器,并且功率放大器通常可以是个人音频设备中的功率的主要消耗者,并且因此可能对个人音频设备的电池寿命具有最大影响。在具有用于输出级的线性功率放大器的设备中,功率在低信号电平输出期间被浪费,因为有源输出晶体管两端的电压降加上输出电压将等于恒定电源轨电压。因此,对于减少(多个)输出晶体管上的电压降并且从而减少由(多个)输出晶体管以耗散的形式浪费的功率,诸如g类和h类的放大器拓扑是期望的。
3.为了向这种功率放大器提供可改变的电源电压,可以使用电荷泵电源,例如美国专利8,311,243中公开的那种电荷泵电源,其中电路的输出处的信号电平的指示用于控制g类拓扑中的电源电压。一般而言,只要音频源中存在低信号电平的时段,上述拓扑可以提高音频放大器的效率。典型地,在这种拓扑中,多个阈值限定了用于电荷泵电源的输出信号电平相关的操作模式,其中在每个模式中,由电荷泵电源生成不同的电源电压。
4.在典型的电荷泵电源中,电荷泵可以根据电荷泵的开关周期的两个不重叠的时钟相位来操作,其中在到电荷泵的输入电源(例如,电池)、用于存储电荷的电荷泵的快速电容器和提供由电荷泵生成的电源电压的输出负载电容器之间具有不同的连接组合。
5.可以示出的是,在电荷泵中,电阻式功率损耗可以随着增加的开关频率而降低,而静态功率损耗可以随着增加的开关频率而增加。作为开关频率的函数,这些电阻式损耗和静态损耗的总和可以具有最小值,并且这个最小值可以代表功率损耗可以被最小化的最佳频率。这种最佳频率也可以随着由电荷泵在其输出处驱动的输出电流负载而变化。然而,电荷泵通常不包括测量负载电流的直接方式,并且添加这种电流检测电路系统可能是昂贵且不切实际的。
技术实现要素:
6.根据本公开的教导,可以减少或消除与电荷泵中的功率损耗相关联的某些缺点和问题。
7.根据本公开的实施例,一种用于操作具有可变开关频率的电荷泵的方法可以包括:将目标最小输出电压与在电荷泵的输出处生成的输出电压进行比较,并且基于该比较结果来控制电荷泵的开关的开关,使得可变开关频率随着由电荷泵驱动的输出电流变化而
变化。
8.根据本公开的这些和其他实施例,一种用于操作具有可变开关频率的电荷泵的系统可以包括:输入,该输入被配置为接收指示在电荷泵的输出处生成的输出电压的信号;以及控制电路,该控制电路被配置为将目标最小输出电压与在电荷泵的输出处生成的输出电压进行比较,并基于该比较结果来控制电荷泵的开关的开关,使得可变开关频率随着由电荷泵驱动的输出电流变化而变化。
9.根据本公开的这些和其他实施例,一种设备可以包括具有可变开关频率的电荷泵和控制电路,该控制电路被配置为将目标最小输出电压与在电荷泵的输出处生成的输出电压进行比较,并且基于该比较结果来控制电荷泵的开关的开关,使得可变开关频率随着由电荷泵驱动的输出电流变化而变化。
10.从本文包括的附图、描述和权利要求中,本公开的技术优点对于本领域技术人员来说是显而易见的。实施例的目的和优点将至少通过权利要求中特别指出的元件、特征和组合来实现和达到。
11.应当理解的是,前面的整体性描述和下面的详细描述都是说明性的示例,并不限制本公开中阐述的权利要求。
附图说明
12.通过结合附图参考以下描述,可以获得对示例、本实施例及其某些优点的更完整的理解,在附图中相同的附图标记表示相同的特征,并且其中:
13.图1是根据本公开的实施例的示例个人音频设备的图示;
14.图2是根据本公开的实施例的示例集成电路的所选择的组件的框图,该示例集成电路可以被实施为图1中描绘的个人音频设备或任何其他合适设备的音频集成电路;
15.图3是根据本公开实施例的示例电荷泵电源的所选择的组件的框图;
16.图4a和图4b是根据本公开的实施例的所选择的波形相对于时间的曲线图的图示,描绘了电荷泵电源在电荷泵电源的转移和充电阶段期间的操作;
17.图5a至图5d是根据本公开的实施例的所选择的波形相对于由电荷泵电源生成的输出电流的曲线图的图示;
18.图6示出了根据本公开实施例的用于使用电荷泵电源的阈值最小输出电压来控制电荷泵电源中的开关频率的示例方法的流程图;
19.图7是根据本公开实施例的由电荷泵电源生成的目标最小输出电压和时间指数之间的示例关系的曲线图的图示;
20.图8a至图8c是根据本公开的实施例的所选择的波形相对于时间的曲线图的图示,描绘了响应于电荷泵电源的负载电流的阶跃的电荷泵电源的操作;
21.图9示出了根据本公开实施例的用于为由电荷泵电源生成的输出电压设置可变目标最小电压的示例方法的流程图;
22.图10示出了根据本公开的实施例的用于为由电荷泵电源生成的输出电压设置连续可变目标最小电压的示例方法的流程图,其中连续可变目标最小电压在电荷泵电源的充电阶段期间连续更新;
23.图11是根据本公开实施例的用于图10中描述的可变目标最小电压方法的电源电
压和最小电压的示例波形的图示;
24.图12示出了根据本公开的实施例的用于为由电荷泵电源生成的输出电压设置连续可变目标最小电压的示例方法的流程图,其中连续可变目标最小电压在电荷泵电源的充电阶段和转移阶段期间连续更新;
25.图13是根据本公开实施例的用于图12中描述的连续可变目标最小电压方法的电源电压和最小电压的示例波形的图示;以及
26.图14是根据本公开的实施例的所选择的波形相对于时间的曲线图的图示,描绘了具有频率和占空比控制的电荷泵电源的操作。
具体实施方式
27.图1是根据本公开的实施例的示例个人音频设备1的图示。个人音频设备1是其中可以采用根据本公开的实施例的技术的设备的示例,但是应当理解,为了实践权利要求中所述的主题,并不需要在所示的个人音频设备1中或者在随后的图示中所描绘的电路中包含的所有元件或配置。个人音频设备1可以包括换能器(诸如扬声器5),该换能器再现由个人音频设备1接收的远程语音以及其他本地音频事件,诸如铃声、所存储的音频节目材料、用于提供平衡的对话感知的近端语音(即,个人音频设备1的用户的语音)的注入、以及需要由个人音频设备1再现的其他音频(诸如来自由个人音频设备1接收的网页或其他网络通信的源)、以及音频指示(诸如低电量指示)和其他系统事件通知。附加地或替代性地,耳机3可以耦合到个人音频设备1,用于生成音频。如图1所示,耳机3可以呈一对耳塞扬声器8a和8b的形式。插头4可以提供耳机3到个人音频设备1的电端子的连接。图1中描绘的耳机3和扬声器5仅仅是示例,并且应当理解的是,个人音频设备1可以与各种音频换能器结合使用,包括但不限于,专属或集成扬声器、头戴式受话器、耳塞、入耳式耳机和外部扬声器。
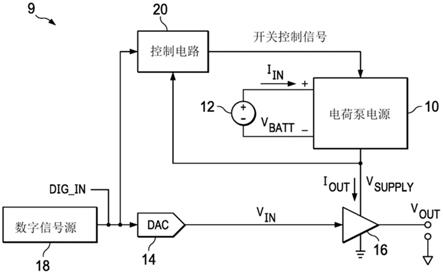
28.个人音频设备1可以向用户提供显示,并使用触摸屏2接收用户输入,或者替代性地,标准lcd可以与设置在个人音频设备1的面和/或侧部上的各种按钮、滑动件和/或拨号盘相组合。同样如图1所示,个人音频设备1可以包括音频集成电路(integrated circuit,ic)9,用于生成模拟音频信号以传输到耳机3、扬声器5和/或另一音频换能器。
29.图2是根据本公开的实施例的示例ic 9的所选择的组件的框图,该示例ic9可以被实施为个人音频设备1或任何其他合适设备的音频ic 9。如图2所示,数字信号源18(例如,处理器、数字信号处理器、微控制器、测试装备或其他合适的数字信号源)可以向数模转换器(digital-to-analog converter,adc)14提供数字输入信号dig_in,该数模转换器又可以将数字输入信号dig_in转换成等效的模拟输入信号v
in
,并将模拟输入信号v
in
传送到功率放大器级16,该功率放大器级可以放大或衰减模拟输入信号v
in
并提供输出信号v
out
,在其中数字输入信号dig_in、模拟输入信号v
in
和输出信号v
out
是音频信号的实施例中,该输出信号可以操作扬声器、头戴式受话器换能器和/或线路级信号输出。然而,如图2所描绘的ic 9的应用可以不限于音频应用,并且可以应用于其他类型的应用,包括但不限于振动触觉致动器或其他致动器。此外,虽然放大器级16被描绘为生成单端音频输出信号v
out
的单端输出,但是在一些实施例中,放大器级16可以包括差分输出,并且因此可以提供差分音频输出信号v
out
。
30.电荷泵电源10可以向放大器16提供电源电压v
supply
的电源轨输入,并且可以接收
通常来自电池12或其他电源的电源输入,其可以向电荷泵电源10提供输入电压v
batt
。控制电路20可以向电荷泵电源10供应开关控制信号(例如,呈脉宽调制信号的形式),以便控制由电荷泵电源10生成的电源电压v
supply
。这种开关控制信号还可以限定荷泵电源10的所选择的操作模式,以便根据放大器16的输出处的预期和/或实际信号电平来调节由电荷泵电源10生成的电源电压v
supply
。当在放大器输出v
out
处存在和/或预期低信号电平时,模式控制电路20可以通过根据输出信号v
out
或指示输出信号v
out
的信号(例如,数字输入信号dig_in)改变电源电压v
supply
来提高音频ic 9的功率效率。因此,为了保持功率效率,在任何给定时间,控制电路20可以从多个操作模式中选择操作模式,每个操作模式利用开关控制信号控制电荷泵电源10的开关,以在不同的电源电压v
supply
下操作电荷泵电源10,其中一个操作模式下的电源电压v
supply
可以是其他操作模式的电源电压的有理倍数或比值。
31.图3是根据本公开实施例的示例电荷泵电源10的所选择的组件的框图。如图3所示的电荷泵电源10可以被配置为在两种模式下操作:第一模式,其中由电荷泵电源10输出的电源电压v
supply
等于输入电压v
batt
,以及第二模式,其中由电荷泵电源10输出的电源电压v
supply
等于输入电压v
batt
的两倍。如图3所示,电荷泵电源10可以包括开关32、34、36和38、快速电容器40和电荷泵输出电容器42。
32.每个开关32、34、36和38可以包括任何合适的设备、系统或装置,用于响应于由开关接收的控制信号,当开关被启用(例如,闭合或接通)时在电路中建立连接并且当开关被禁用(例如,开路或断开)时断开连接。为了清楚和说明的目的,没有描绘开关32、34、36和38的开关控制信号,尽管这种控制信号将存在用于选择性地启用和禁用开关32、34、36和38。在一些实施例中,开关32、34、36和38可以包括n型金属氧化物半导体场效应晶体管。在这些和其他实施例中,开关32、34、36和38可以包括p型金属氧化物半导体场效应晶体管。开关32可以耦合在电荷泵电源10的正输入端子和快速电容器40的第一端子之间。开关34可以耦合在电荷泵电源10的正输入端子和快速电容器40的第二端子之间。开关36可以耦合在电荷泵电源10的负输入端子和快速电容器40的第二端子之间。开关38可以耦合在快速电容器40的第一端子和电荷泵输出电容器42的第一端子之间。
33.快速电容器40和电荷泵输出电容器42可以各自包括用于在电场中静电存储能量的无源双端子电气组件,其可以响应于电容器两端的时变电压而生成电流(反之亦然)。电荷泵输出电容器42可以耦合在电荷泵电源10的输出端子之间,并且因此可以存储由电荷泵电源10输出的电源电压v
supply
。
34.在第一或“1x”模式中,电荷泵电源10可以以单相操作,其中在操作期间开关34可以被禁用并且开关32、36和38可以被启用,从而将电荷泵输出电容器42上的电压v
supply
充电到输入电压v
batt
。因此,在1x模式中,电荷泵电源10的开关可能不在周期性频率下换向。在第二或“2x”模式中,电荷泵电源10可以顺序地在充电阶段和转移阶段中操作,在该充电阶段中,开关32和36被启用并且开关34和38被禁用,从而允许电荷从电池12转移到快速电容器40,在该转移阶段中开关32和36被禁用并且开关34和38被启用,从而提升快速电容器40上的电压并允许电荷从快速电容器40转移到电荷泵输出电容器42。因为电荷泵电源10的开关的周期性开关可以在“2x”阶段期间周期性开关,所以可能期望以最佳频率操作这种开关,以减少电荷泵电源10中的电阻性功率损耗和静态功率损耗的总和,如以上背景技术部分所述。
35.尽管图3描绘了电荷泵电源10的特定实施方式,该电荷泵电源被配置为在第一模式和第二模式之间切换,在该第一模式中,电源电压v
supply
和输入电压v
batt
的升压比是1,在该第二模式中电源电压v
supply
和输入电压v
batt
的升压比是2,但是本文中的系统和方法通常可以应用于具有多于两种操作模式和/或除了1或2的升压比(例如,1.5、3等)的电荷泵电源。此外,尽管图3描绘了具有开关32至38、单个快速电容器40和电荷泵输出电容器42的电荷泵电源10的特定实施方式,但是本文中的系统和方法通常可以应用于具有任何合适的开关拓扑、一个或多个回扫电容器以及一个或多个负载电容器的电荷泵电源。
36.为了在2x模式下以最佳频率操作电荷泵电源10,使得功率损耗最小化,控制电路20可以基于由电荷泵电源10生成的电源电压v
supply
的阈值来确定电荷泵电源10的开关的开关时间。电源电压v
supply
的阈值的这种定义又可以使得控制电路20以可变开关频率操作电荷泵电源10,以便最小化功率损耗,如下面更详细描述的那样。
37.图4a和图4b是根据本公开的实施例的所选择的波形相对于时间的曲线图的图示,描绘了电荷泵电源10在电荷泵电源10的转移和充电阶段期间的操作。图4a描绘了由控制电路20生成的开关控制信号(数字化为“0”或“1”)随时间在电荷泵电源10的转移阶段和充电阶段之间切换。图4b描绘了在电荷泵电源10的开关周期内由电荷泵电源10生成的电源电压v
supply
,示出了在转移阶段开始时电源电压v
supply
增加,随后是在转移阶段和充电阶段电源电压v
supply
的降低,直到电源电压v
supply
降低到最小电压v
min
,在该最小电压下电荷泵电源10可以从充电阶段切换到转移阶段。
38.图5a至图5d是根据本公开的实施例的所选择的波形相对于由电荷泵电源10生成的输出电流i
out
的曲线图的图示。图5a描绘了用于三种不同情况的最小电压v
min
相对于输出电流i
out
的变化:(a)固定的开关频率fs(例如,fs=2mhz);(b)最佳开关频率fs,在该最佳开关频率下电荷泵电源10中功率损耗被最小化;以及(c)固定的最小电压v
min
(但是被限制处于最大频率,例如,fs=2mhz)被设置为近似最佳开关频率fs的阈值。图5b描绘了用于这三种情况(a)至(c)的功率效率相对于输出电流i
out
。图5c描绘了用于这三种情况(a)至(c)的开关频率fs相对于输出电流i
out
。图5d描述了用于两种情况(b)和(c)相对于情况(a)的功率益处。图5d的曲线表明,在输出电流i
out
的较低的负载下,设置目标最小电压v
min
可以是有效的,尽管具有其简洁性。图5d的曲线还示出,在输出电流i
out
的较高的负载下,以最佳开关频率fs操作可以导致显著更高的功率益处。
39.因此,控制电路20可以被配置为实施滞后控制策略,由此控制电路20可以监控电源电压v
supply
,并且当电源电压v
supply
穿过低于被选择来优化开关频率fs和功率损耗的目标最小电压v
min
时,改变电荷泵电源10的开关状态(例如,从转移阶段到充电阶段)。控制电路20可以实施用于选择目标最小电压v
min
的至少两种方法中的一个:(a)将目标最小电压v
min
设置为固定值,该固定值可以近似电流i
out
的较低的负载下的最佳开关频率fs;以及(b)随着时间改变目标最小电压v
min
,以更接近地近似最佳开关频率fs,特别是在电流i
out
的中到高负载下。
40.这种方法可能有许多优点。例如,这样的方法可以简单并且相当容易地在控制电路20内实施,这样的实施方式可以主要在数字域内。作为另一示例,这些方法提供了有源反馈控制,该有源反馈控制可以独立于放大器16、耦合在放大器16输出处的负载以及电池12。而且,这些方法可以对输出电流i
out
的变化提供快速反应,这可以防止在开关频率fs变化太
慢的情况下可能出现的电流的尖峰。
41.图6示出了根据本公开的实施例的用于使用电荷泵电源10的阈值最小电源电压v
min
来控制电荷泵电源10中的开关频率的示例方法的流程图。根据一些实施例,方法50可以开始于步骤52。如上所述,本公开的教导可以以音频ic 9的各种配置实施。由此,方法50的优选初始化点和包括方法50的步骤的顺序可以取决于所选择的实施方式。
42.在步骤52,控制电路20可以在电荷泵电源10的充电阶段开始时启动定时器t(例如,t=0)并开始定时。在步骤54,控制电路20可以确定电源电压vsupply是否小于目标最小电压v
min
。如果电源电压v
supply
小于目标最小电压v
min
,方法50可以前进到步骤56。否则,方法50可以前进到步骤58。
43.在步骤56,响应于电源电压v
supply
小于目标最小电压v
min
,控制电路20可以确定定时器t是否已经超过最小相位时间t
min
。最小相位时间t
min
的存在实际上可以为电荷泵电源10设置最大开关频率fs。如果定时器t已经超过最小相位时间t
min
,方法50可以前进到步骤60。否则,方法50可以再次前进到步骤54。
44.在步骤58,响应于电源电压v
supply
超过目标最小电压v
min
,控制电路20可以确定定时器t是否已经超过最大相位时间t
max
。最大相位时间t
max
的存在实际上可以为电荷泵电源10设置最小开关频率fs。如果定时器t已经超过最大相位时间t
max
,方法50可以前进到步骤60。否则,方法50可以再次前进到步骤54。
45.在步骤60,控制电路20可以存储定时器t的当前值t
count
。如下所见,控制电路20可以使用持续时间t
count
来控制电荷泵电源10,使得转移阶段的持续时间近似等于其紧接着的充电阶段。在步骤62,控制电路20可以使电荷泵电源10转换到转移阶段中。
46.在步骤64,控制电路20可以在转移阶段开始时启动定时器t(例如,t=0)并开始定时。在步骤66,控制电路20可以确定定时器t是否小于充电阶段的持续时间t
count
。如果定时器t小于充电阶段的持续时间t
count
,方法50可以前进到步骤68。否则,方法50可以前进到步骤72。
47.在步骤68,响应于定时器t小于充电阶段的持续时间t
count
,控制电路20可以确定定时器t是否超过最小阶段时间t
min
。如果计时器t超过最小相位时间t
min
,方法50可以前进到步骤70。否则,方法50可以再次前进到步骤66。
48.在步骤70,响应于定时器t超过最小相位时间t
min
,控制电路20可以确定电源电压v
supply
是否小于目标最小电压v
min
。如果电源电压v
supply
小于目标最小电压v
min
,方法50可以前进到步骤72。这种确定可以提供转移阶段期间发生的欠压的故障安全确定。
49.在步骤72,响应于转移阶段的持续时间满足前一充电阶段的持续时间(例如,当定时器t满足或超过持续时间t
count
时所指示的)或者响应于传送转移期间发生的欠压状况(例如,电源电压v
supply
下降到目标最小电压v
min
以下并且定时器t超过最小相位时间t
min
),控制电路20可以使电荷泵电源10转变到转移阶段。在完成步骤72之后,方法50可以再次前进到步骤52。
50.尽管图6公开了关于方法50要采取的特定数量的步骤,但是方法50可以利用比图6中描述的步骤更多或更少的步骤来执行。此外,尽管图6公开了关于方法50采取的步骤的特定顺序,但是包括方法50的步骤可以以任何合适的顺序完成。
51.方法50可以使用控制电路20或可操作来实施方法50的任何其他系统来实施。在某
些实施例中,方法50可以部分或全部在实现在计算机可读介质中的软件和/或固件中实施。
52.值得注意的是,当欠压状况在转移阶段发生时,后续充电阶段可能仅持续最小相位时间t
min
,随后是仅持续最小相位时间t
min
的下一转移阶段。因此,当欠压状况在转移阶段期间发生时,可能发生电荷泵电源10在其最大频率下的至少一个操作周期。
53.在一些实施例中,控制电路20可以施加固定的目标最小电压v
min
。在其他实施例中,控制电路20可以施加可变的目标最小电压v
min
。例如,在一些实施例中,控制电路20可以将时间索引t
index
设置为等于在紧接在前的充电阶段期间记录的持续时间t
count
,并且时间索引t
index
可以被用作计算或查找相对应的目标最小电压v
min
的索引。例如,图7是根据本公开实施例的目标最小电压v
min
和时间指数t
index
之间的示例关系的曲线图的图示。在一些实施例中,这种关系可以基于表征和测试来计算,以确定作为时间指数t
index
的函数的最佳目标最小电压v
min
。因此,在操作中,控制电路20可以使用呈查找表或公式的形式的关系(诸如图7所示的关系),并且基于从紧接在前的充电阶段期间记录的持续时间t
count
导出的时间指数t
index
来确定目标最小电压v
min
。
54.在一些实施例中,控制电路20可以对目标最小电压v
min
的连续确定的值应用滤波,以便平滑所使用的目标最小电压v
min
的值。为了进一步示出这种平滑,图8a至图8c是根据本公开的实施例的所选择的波形对时间的曲线图,描绘了电荷泵电源10响应于输出电流i
out
的阶跃的操作。图8b描绘了由控制电路20生成的开关控制信号(数字化为“0”或“1”)随时间在电荷泵电源10的转移阶段和充电阶段之间切换。图8c描绘了对于可变目标最小电压v
min
(在被留置为不平滑化的情况下)、可变目标最小电压v
min
(在被平滑化的情况下)和响应于用于电荷泵电源10的控制的经平滑化的可变目标最小电压v
min
的电源电压v
supply
的示例波形。
55.在使用可变目标最小电压v
min
的这种方法下,即使在平滑化可变目标最小电压v
min
的情况下,被实施用于确定可变目标最小电压v
min
的控制回路也可能经历不稳定性,从而导致开关频率fs的振荡。为了克服这种不稳定性,时间指数t
index
可以基于定时器t的当前值连续更新,并且这种连续更新的时间指数t
index
又可以用于在充电阶段期间连续更新可变目标最小电压v
min
。例如,在充电阶段期间,时间索引t
index
可以等于紧接在前的充电阶段期间记录的持续时间t
count
和定时器t的当前值中的较高者。因此,一旦定时器t超过紧接在前的充电阶段期间记录的持续时间t
count
,时间索引t
index
的值可以在充电阶段的剩余部分期间连续更新,并且用于在充电阶段的剩余部分期间连续更新可变目标最小电压v
min
。
56.图9示出了根据本公开实施例的用于设置可变目标最小电压v
min
的示例方法80的流程图。根据一些实施例,方法80可以开始于步骤82。如上所述,本公开的教导可以以音频ic 9的各种配置实施。由此,方法80的优选初始化点和包括方法80的步骤的顺序可以取决于所选择的实施方式。
57.在步骤82,控制电路20可以在充电阶段开始时,将时间指数t
index
设置为等于在紧接在前的充电阶段期间记录的持续时间t
count
。在步骤84,控制电路20可以基于时间索引t
index
来确定可变目标最小电压v
min
(例如,通过计算或被编入索引的查找,如上所述)。在步骤86,控制电路20可以对所确定的可变目标最小电压v
min
应用滤波。
58.在步骤88,控制电路20可以确定电荷泵电源10是否仍在充电阶段操作。如果电荷泵电源10仍在充电阶段操作,方法80可以前进到步骤90。否则,方法80可以结束。
59.在步骤90,控制电路20可以确定定时器t的值是否超过紧接在前的充电阶段期间记录的持续时间t
count
。如果定时器t超过了紧接在前的充电阶段记录的持续时间t
count
,方法80可以进行到步骤92。否则,方法80可以再次前进到步骤88。
60.在步骤92,响应于定时器t的值超过紧接在前的充电阶段期间记录的持续时间t
count
,控制电路20可以将时间索引t
index
的值更新为等于定时器t的值。在完成步骤92之后,方法80可以再次前进到步骤84。
61.尽管图9公开了关于方法80要采取的特定数量的步骤,但是方法80可以利用比图9中描述的步骤更多或更少的步骤来执行。此外,尽管图9公开了关于方法80采取的步骤的特定顺序,但是包括方法80的步骤可以以任何合适的顺序完成。
62.方法80可以使用控制电路20或可操作来实施方法80的任何其他系统来实施。在某些实施例中,方法80可以部分或全部在实现在计算机可读介质中的软件和/或固件中实施。
63.图10示出了根据本公开的实施例的用于为由电荷泵电源生成的输出电压设置连续可变目标最小电压的示例方法100的流程图,其中连续可变目标最小电压在电荷泵电源的充电阶段期间连续更新。图11是根据本公开实施例的用于由方法100描述的可变目标最小电压方法的电源电压和最小电压的示例波形的图示。
64.根据一些实施例,方法100可以开始于步骤102。如上所述,本公开的教导可以以音频ic 9的各种配置实施。由此,方法100的优选初始化点和包括方法100的步骤的顺序可以取决于所选择的实施方式。
65.在步骤102,控制电路20可以在充电阶段开始时重置定时器t。在步骤104,控制电路20可以将时间索引t
index
的值更新为等于定时器t的值。在步骤106,控制电路20可以基于时间索引t
index
来确定可变目标最小电压v
min
(例如,通过模拟方法、数字计算或被编入索引的查找,如上所述)。在步骤108,控制电路20可以对所确定的可变目标最小电压v
min
应用滤波,尽管在一些实施例中,控制电路20可以不应用滤波,并且可以省略步骤108。在步骤110,控制电路20可以确定电荷泵电源10的充电阶段是否已经结束。例如,当电源电压v
supply
等于或小于可变目标最小电压v
min
时,可以确定充电阶段已经结束。如果电荷泵电源10的充电阶段已经结束,方法100可以再次前进到步骤102,使得控制电路20为电荷泵电源10的下一充电阶段确定可变目标最小电压v
min
。否则,方法100可以再次前进到步骤104,并且可变目标最小电压v
min
可以基于定时器t在电荷泵电源10的当前开关周期中再次更新。
66.尽管图10公开了关于方法100要采取的特定数量的步骤,但是方法100可以利用比图10中描述的步骤更多或更少的步骤来执行。此外,尽管图10公开了关于方法100采取的步骤的特定顺序,但是包括方法100的步骤可以以任何合适的顺序完成。
67.方法100可以使用控制电路20或可操作来实施方法100的任何其他系统来实施。在某些实施例中,方法100可以部分或全部在实现在计算机可读介质中的软件和/或固件中实施。
68.图12示出了根据本公开的实施例的用于为由电荷泵电源生成的输出电压设置连续可变目标最小电压的示例方法120的流程图,其中可变目标最小电压在电荷泵电源的充电阶段和转移阶段期间连续更新。图13是根据本公开实施例的用于由方法100描述的可变目标最小电压方法的电源电压和最小电压的示例波形的图示。
69.在步骤122,控制电路20可以在充电或转移阶段开始时重置定时器t。在步骤124,
控制电路20可以将时间索引t
index
的值更新为等于定时器t的值。在步骤126,控制电路20可以基于时间索引t
index
来确定可变目标最小电压v
min
(例如,通过模拟方法、数字计算或被编入索引的查找,如上所述)。在步骤128,控制电路20可以对所确定的可变目标最小电压v
min
应用滤波,尽管在一些实施例中,控制电路20可以不应用滤波,并且可以省略步骤128。在步骤130,控制电路20可以确定电荷泵电源10的充电或转移阶段是否已经结束。如果电荷泵电源10的充电或传送阶段已经结束,方法120可以再次前进到步骤122,使得控制电路20为电荷泵电源10的下一阶段确定可变目标最小电压v
min
。否则,方法120可以再次前进到步骤124,并且可变目标最小电压v
min
可以基于定时器t在电荷泵电源10的当前阶段中再次更新。
70.尽管图12公开了关于方法120要采取的特定数量的步骤,但是方法120可以利用比图12中描述的步骤更多或更少的步骤来执行。此外,尽管图12公开了关于方法120采取的步骤的特定顺序,但是包括方法120的步骤可以以任何合适的顺序完成。
71.方法120可以使用控制电路20或可操作来实施方法120的任何其他系统来实施。在某些实施例中,方法120可以部分或全部在实现在计算机可读介质中的软件和/或固件中实施。
72.如上参考图10至图13所述的使用连续可变目标最小电压v
min
的方法可以类似于在某些类型的电感开关转换器架构(诸如电流模式控制(current-mode control,cmc)和恒定导通时间(constant-on time,cot)转换器架构)中使用的斜率补偿。传统上,斜率补偿在开关周期的一部分或整个周期内,对被比较的两个量增加一个连续变化的参考。例如,对于cmc架构,被比较的量可以是功率转换器电感器电流相对于电流控制参考。对于cot架构,被比较的量可以是功率转换器的输出电压相对于电压控制参考。类似地,如上参考图10至13所述的使用连续可变目标最小电压v
min
的方法可以将电源电压v
supply
与可变目标最小电压v
min
进行比较,该可变目标最小电压可以在开关周期期间连续变化。
73.在一些实施例中,图7中示出的或者在图10的方法100或者图12的方法120中实施的用于生成可变目标最小电压v
min
的斜率分布可以完全在模拟域中。例如,这种实施方式可以使用进入电阻-电容网络的电流源来生成作为时间的函数的可变目标最小电压v
min
,其中比较器用于检测充电阶段何时已经结束。替代性地,在一些实施例中,用于生成可变目标最小电压v
min
的斜率分布可以在数字域中实施(例如,通过数字化电源电压v
supply
并利用数字逻辑实施方法100或方法120)。
74.尽管前面对目标最小电压v
min
的讨论实现了电荷泵电源10的频率控制,但是在一些实施例中,控制系统20也可以被配置为共同控制电荷泵电源10的频率和占空比。在这种方法下,当控制系统20通过检测到在开关周期期间没有越过目标最小电压v
min
来确定可以降低频率时,控制系统20可以首先降低频率,同时保持50%的占空比,直到充电阶段开始完全稳定。控制系统20可以使用比较器或寄存器来确定是否已经发生稳定,以将一定数量的开关周期设置为完全稳定的时间量。在达到这样的阈值或时间值之后,如果仍然没有越过目标最小电压v
min
,则控制系统20可以将附加时间分配给电荷泵电源10的转移阶段,以便同时增加占空比和降低电荷泵电源10的频率。
75.为了控制占空比和频率,控制系统20可以类似于上述仅控制电荷泵电源10的频率的操作来操作。例如,如上所讨论的那样,控制系统20可以实施定时器,该定时器限定了用于电荷泵电源10的充电和转移阶段两者的总时间。然而,对于占空比控制,控制系统20可以
实施另一定时器,该另一定时器在每个转移阶段开始时复位并运行直到随后的充电阶段结束。如果在任何给定的转移/充电序列期间,电源电压v
supply
在小于前一转移/充电序列的第二定时器的值的第二时间的值处降低到目标最小电压v
min
以下,则控制系统20可以修改后续转移/充电序列的持续时间。
76.例如,如果在充电阶段期间电源电压v
supply
降低到目标最小电压v
min
以下,控制系统20可以立即结束充电阶段并切换到下一转移阶段。如果开关周期的占空比大于50%,控制系统20可以从下一转移阶段减去当前开关周期和前一开关周期之间的时间差。然而,如果这种减法导致下一开关周期的小于50%的占空比,则控制周期20可以划分转移和充电阶段之间的额外时间差。如果在v
supply
降低到低于目标最小电压v
min
时占空比已经达到50%,则控制系统20可以从下一充电阶段减去当前开关周期和前一开关周期之间的时间差的一半。
77.作为另一示例,如果在转移阶段期间电源电压v
supply
降低到目标最小电压v
min
以下,控制系统20可以立即结束转移阶段、切换到下一充电阶段,并运行充电阶段持续与前一充电阶段相同的时间量。控制系统20然后可以使用上述用于在充电阶段期间电源电压v
supply
降低到目标最小电压v
min
以下的规则来降低随后的转移阶段。
78.在任一情况下,控制系统20可以应用可编程相位和序列持续时间最小和最大设置,以便对电荷泵电源10的最小和最大开关频率以及最小和最大占空比设置界限。
79.所组合的频率和占空比控制方案可以在图14中进一步示出。图14是根据本公开的实施例的所选择的波形对时间的曲线图的图示,描绘了具有频率和占空比控制的电荷泵电源10的操作。如图14所见,在电荷泵电源10的充电阶段期间的时间t,电源电压v
supply
可以降低到目标最小电压v
min
以下。因此,控制系统20可以确定当前开关周期的持续时间t
n 1
以及当前开关周期和前一开关周期(tn)之间的差值t
n-t
n 1
,并且从随后的转移阶段中减去这个差值。
80.如本文所使用的那样,当两个或更多个元件被称为彼此“耦接”时,这个术语指示这两个或更多个元件处于电子连通或机械连通(如适用的的话),无论是间接连接还是直接连接、具有中间元件或没有中间元件。
81.本公开涵括本领域普通技术人员将理解的对本文中的示例实施例的所有改变、替换、变化、变更和修改。类似地,在适当的情况下,所附权利要求涵括本领域普通技术人员将理解的对本文中的示例实施例的所有改变、替换、变化、变更和修改。此外,在所附权利要求中对适配成、布置成、能够、配置成、使其能够、能够操作或可操作以执行特定功能的装置或系统或装置或系统的组件的引用涵括该装置、系统或组件,无论其或该特定功能是否被激活、开启或解锁,只要该装置、系统或组件如此适配、布置、能够、配置、使其能够、能够操作或可操作即可。因此,在不脱离本公开的范围的情况下,可以对本文描述的系统、装置和方法进行修改、添加或省略。例如,系统和装置的组件可以是集成的或分离的。而且,本文公开的系统和装置的操作可以由更多、更少或其他组件来执行,并且所描述的方法可以包括更多、更少或其他步骤。附加地,步骤可以以任何合适的顺序执行。如本文所用,“每一个”是指集合的每一个成员或集合的子集的每一个成员。
82.尽管示例性实施例在附图中示出并在下面描述,但是本公开的原理可以使用任何数量的技术(无论当前是否已知)来实施。本公开不应以任何方式限于附图中示出的和上文
描述的示例性实施方式和技术。
83.除非另有特别说明,附图中描绘的物品不一定按比例绘制。
84.本文所引述的所有示例和条件性语言都是为了教学目的以帮助读者理解发明人为推进本领域所贡献的公开内容和构思,并且被解释为不限于这些具体引述的示例和条件。尽管已经详细描述了本公开的实施例,但是应当理解的是,在不脱离本公开的精神和范围的情况下,可以对其进行各种改变、替换和变更。
85.虽然上面已经列举了具体的优点,但是各种实施例可以包括列举的优点中的一些、不包括列举的优点或者包括列举的优点中的全部。附加地,在阅读了前述附图和描述之后,其他技术优点对于本领域普通技术人员来说将变得显而易见。
86.为了有助于专利局和在本技术中发布的任何专利的任何读者解释所附权利要求,申请人希望注意,除非在特定权利要求中明确使用了词语“用于
……
装置”或“用于
……
步骤”,否则他们不意在所附权利要求或权利要求元素中的任何一个触发35 u.s.c.
§
112(f)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。