1.本发明涉及旋转机械故障诊断与振动信号分析处理技术领域,尤其涉及一种时变工况下无转速计的行星齿轮箱复合故障诊断方法。
背景技术:
2.行星齿轮箱具有传动平稳、减速比大、工作效率高和承载能力强等优点,已被广泛应用于风力发电机、直升机、卸船机、堆取料机和舰船等大型复杂机械装备中。然而,在工程实际中行星齿轮箱通常服役于高负荷、强冲击、高污染和工况变化频繁等恶劣环境下,这极易导致行星齿轮箱中不同部件同时出现故障,即出现复合故障。当行星齿轮箱发生复合故障时,不同类型的故障相互耦合、相互干扰,故障信号呈现出明显的非线性;此外,时变工况下的故障信号还具有多分量调制、非平稳和特征微弱等特性,导致现有的以稳态工况为前提的故障诊断方法将不再适用。阶次跟踪技术是解决变转速问题的有效方法,但该方法需要借助转速测量装置来获取转速信息,这对于安装空间不足以及经济条件受限的机械装备难以实现。因此,开展时变工况下无转速计的行星齿轮箱复合故障诊断研究具有十分重要的现实意义。
3.时频分析能够揭示信号的频率结构及其时变特征,因此通常被用来分析非平稳信号。传统的时频分析方法包括:短时傅立叶变换(short time fouriertransform,stft)、小波变换、wigner-ville分布等。由于受heisenberg 不确定性原理的影响,传统方法在时域和频域不能同时达到最佳效果。为克服传统时频方法的不足,出现了同步压缩变换方法,用来改善时频表示的聚集性,但该方法对低信噪比、多分量的非线性非平稳信号处理效果不明显。随后,又出现了多重同步压缩变换方法,进一步改进了时频聚集性,且适用于低信噪比的非线性非平稳信号。然而,该方法估计的瞬时频率有时会偏离信号的真实值。同步压缩提取变换方法,该方法不仅能有效地提取非平稳信号的时变信息实现更好的时频表示。然而,时变工况下行星齿轮箱振动信号为复杂多分量的非平稳信号且受噪声干扰严重,使得信号的频率组成结构非常复杂,导致这些时频分析方法难以有效地提取故障特征信息。自适应chirp 模态分解(adaptive chirp mode decomposition,acmd)算法作为一种新颖的时频分析方法,不仅能够提取非平稳信号中有用的模态成分还可以为接近或重叠的时变分量提供较高的分辨率。但acmd在使用时需要预设初始的瞬时频率才能实现其良好的分解性能。
4.此外,计算阶次跟踪是目前最为常用的阶次分析技术,该方法需要利用键相信息对振动信号进行等角度重采样,从而将时域非平稳信号转换为角域平稳信号来消除时变转速对振动信号产生的影响。但在某些应用场景中,由于安装空间和经济成本受限无法安装转速传感器,导致阶次分析所需要的参考轴转速信息需要从振动信号中进行估计和提取。快速路径寻优算法(fastpath optimization,fpo)能够从原始振动信号的时频表示中提取具有明显幅值优势的瞬时主导啮合倍频(instantaneous dominant meshing multiply, idmm)趋势线并将其等效为参考轴转频,从而能够实现对非平稳信号的角域重采样。
5.当多种故障和强噪声同时存在于测量信号中时,能量较小的微弱故障特征往往会被强噪声或能量较大的特征所掩盖,容易出现故障漏诊或误诊的现象。因此,仍需要对信号中微弱的故障冲击特征进行增强,从而来提高故障诊断的精确性和鲁棒性。最大二阶循环平稳盲解卷积(maximum second ordercyclostationary blind deconvolution,cycbd)算法以最大二阶循环平稳为依据来寻找最佳逆滤波器,能够实现信号完美的降噪和微弱故障冲击的增强。相较于最小熵解卷积方法、最大相关峭度解卷方法积和多点最优最小熵解卷积方法等,cycbd具有更强的微弱故障提取能力。但该算法中的循环频率和滤波器长度这两个关键参数需要人为来确定,缺乏自适应性。
技术实现要素:
6.本发明的目的在于提供一种时变工况下无转速计的行星齿轮箱复合故障诊断方法,以解决无转速计场景下时变转速行星齿轮箱复合故障难以准确诊断的问题,以及acmd算法在使用时需要预设初始的瞬时频率和cycbd算法中关键参数的确定缺乏自适应的问题。
7.为了实现上述目的,本发明提供一种时变工况下无转速计的行星齿轮箱复合故障诊断方法,包括:
8.采集时变工况下的行星齿轮箱故障振动信号;
9.对所述故障振动信号进行自适应模态分解,计算各模态分量的基尼指数 gi值,选取基尼指数gi值最大的模态信号作为敏感分量;
10.从所采集的故障振动信号所对应的短时傅里叶stft时频表示中提取 idmm趋势线,并将所述idmm趋势线等效为参考轴的转频;
11.基于等效参考轴的转频对所述敏感分量进行角域重采样,获得平稳的角域信号;
12.对所述角域信号进行解卷积处理;
13.对解卷积后的角域信号进行包络解调处理,获得包络谱,并从所述包络谱中提取故障特征阶次信息与行星齿轮箱故障特征阶次的理论值进行对比,从而准确判别行星齿轮箱的故障类型,其中,所述行星齿轮箱故障特征阶次的理论值是通过理论计算得到的标准值。
14.一种实现方式中,所述对所述故障振动信号进行自适应模态分解,计算各模态分量的基尼指数gi值,选取基尼指数gi值最大的模态信号作为敏感分量,包括:
15.采用iacmd算法对所述故障振动信号进行自适应模态分解,其中,iacmd 包含对原始acmd算法的改进和基于gi指标的模态重组方案;
16.iacmd算法是在原始acmd算法的基础上将待求解目标函数中时变的解调频率简化为一个常数,即令瞬时频率则改变表达形式为:
[0017][0018]
式中,mean{
·
}代表均值;是一个常数,为acmd第n次迭代的中心频率;为瞬时频率增量。
[0019]
基于gi指标的模态重组方案包括:假设acmd将信号分解为k个模态分量,将所述模
态分量按其gi值降序排列,即即为获得的模态分量,模态重组方案可描述为:
[0020]
其中m<n且m,n∈k
[0021]
从信号中除去
[0022]
end
[0023]
直到任意两个模态分量合并后的gi值不再增加为止,其中,gi的计算公式为:
[0024][0025]
式中,||
·
||1表示l1范数;n为分析信号的长度;se为被分析信号平方包络的离散时间序列,ser是se的升序排列即,ser[1]≤ser[2]≤...≤ser[n];se的计算公式如下:
[0026][0027]
式中,为实值信号x的解析信号;h(
·
)为hilbert变换;j2=-1;
[0028]
一种实现方式中,所述idmm趋势线等效为参考轴的转频f
sr
(t)的具体表达为:
[0029][0030]
其中,g=1,2,...,g,g为啮合频率的最大倍数,fm(t)为齿轮啮合频率,zs和zr分别为太阳轮和齿圈的齿数。
[0031]
一种实现方式中,所述获得平稳的角域信号的步骤,包括:
[0032]
利用acycbd算法对角域信号进行解卷积处理来增强微弱的故障冲击特征;
[0033]
其中,acycbd算法中循环周期频率α和最佳滤波器长度l这两个关键参数的确定准则为:
[0034]
(1)循环周期频率α的确定:利用包络信号自相关函数的局部最大值 r(τ
max
)对应的滞后位置τ
max
来确定信号的循环周期频率;其中,自相关函数计算公式为:
[0035]
r(τ)=∫e(t)e(t τ)dτ
[0036]
其中,r(τ)为自相关函数,e(t)为信号的包络;τ为滞后的时刻点;τ
max
为让e(t)的包络自相关谱达到局部最大值的滞后时刻点;
[0037]
(2)滤波器长度l的确定:设置滤波器长度选取范围为:10≤l≤500;采用包络谱峭度来选取最佳的滤波器长度,当包络谱峭度达到最大值时对应的滤波器长度即为最佳滤波器长度;其中,包络谱峭度的计算公式为:
[0038][0039]
式中,en(f)表示包络谱的幅值;ue为en(f)的均值;n为信号的长度。
[0040]
应用本发明实施例提供的一种时变工况下无转速计的行星齿轮箱复合故障诊断方法,具备的有益效果如下:
[0041]
(1)本发明发挥了iacmd算法和acycbd算法的优势,并将两者相融合用于行星齿轮箱故障诊断中,解决了无转速计场景下变转速行星齿轮箱复合故障特征难以提取的问题。
[0042]
(2)本发明中的iacmd算法能够对时变非平稳振动信号进行自适应模态分解,分离出包含丰富故障冲击的模态分量;将其与基于gi指标的模态重组方案相融合,从而有效地避免了故障信号的过度分解,提高了分析的准确性。
[0043]
(3)本发明采用fpo算法能够从振动信号的时频表示中提取到精确的 idmm趋势线,将其等效为参考轴的转频可与实际的转频相互吻合,从而为角域重采样提供基础;采用等效的转频将时变非平稳的振动信号映射到稳定的角域能够消除时变转速所产生的影响。
[0044]
(4)本发明中的acycbd算法是对原始cycbd算法中的循环周期频率和滤波器长度这两个关键参数进行合理优化选取,从而使算法面临不同的诊断场景时具备自适应性,同时也提高了算法对微弱故障冲击的增强能力。
[0045]
(5)本发明能够在强背景噪声干扰下,提取到清晰明显的行星齿轮箱复合故障特征阶次信息,从而有效地避免了故障漏诊和误判,显著地提高了诊断的精确性和鲁棒性。
附图说明
[0046]
图1是本发明实施例一种时变工况下无转速计的行星齿轮箱复合故障诊断方法的一种流程示意图。
[0047]
图2是本发明实施例中行星齿轮箱实验台示意图。
[0048]
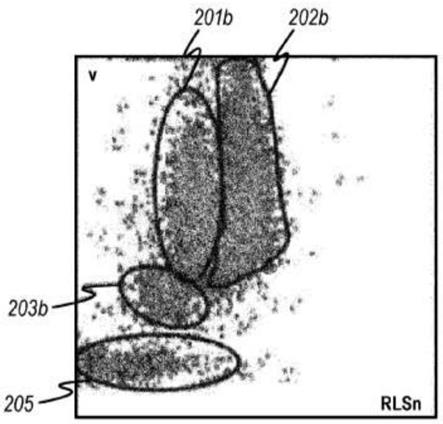
图3是本发明实施列中时变工况下行星齿轮箱复合故障信号分析;
[0049]
其中,(3a)复合故障信号的时域波形、(3b)复合故障信号的傅里叶频谱、(3c)复合故障信号的包络谱、(3d)复合故障信号的时频表示。
[0050]
图4是本发明实施列中复合故障信号的iacmd分解结果。
[0051]
图5是本发明实施列中fpo算法提取的转频曲线图;
[0052]
其中,(5a)idmm趋势线等效为参考轴的转频、(5b)等效转频和实际转频之间的误差。
[0053]
图6是本发明实施列中acycbd算法中循环频率与滤波器长度的确定过程;
[0054]
其中,(6a)m1角域信号的自相关包络谱、(6b)当α=0.8342时最佳滤波器长度的选取过程、(6c)当α=2时最佳滤波器长度的选取过程。
[0055]
图7是本发明实施列中acycbd算法对角域信号的解卷积处理结果。
[0056]
其中,(7a)在参数组合[0.8342,260]下获得的解卷积信号一、(7b) 对应解卷积信号一的包络谱、(7c)在参数组合[2,370]下获得的解卷积信号二、(7d)对应解卷积信号二的包络谱。
具体实施方式
[0057]
以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精神下进行各种修饰或改变。
[0058]
如图1本发明提供一种时变工况下无转速计的行星齿轮箱复合故障诊断方法,包括:
[0059]
s110,采集时变工况下行星齿轮箱故障振动信号。
[0060]
需要说明的是,搭建行星齿轮箱故障诊断实验台,如图2所示。该实验台主要是由1抗振底座、2驱动电机、3弹性联轴器、4二级行星齿轮箱、5 平行轴齿轮箱、6磁粉加载器等组成。行星齿轮箱的齿轮参数和行星轴承的结构参数分别见表1和表2。实验通过线切割技术在太阳轮的某个轮齿上沿着齿根方向加工宽为0.15mm,深为1mm的微小贯通裂纹作为故障;同时,在行星轴承的内圈上人为地进行损坏来模拟内圈局部损伤。实验时,将太阳轮和行星轴承故障件安装在行星齿轮箱的第一级上构成复合故障,并进行实验数据采集。将振动加速度传感器安装在行星齿轮箱壳体的正上方来收集故障振动信号;同时,激光脉冲转速计安装在电机转轴的正上方来测量实时转速信号,用于对比研究。数据采集时,采样频率设置为12000hz。实验过程中,电机转速在5秒内从15.2hz上升到32hz来模拟时变工况。时变工况下,计算得到行星齿轮箱中齿轮与行星轴承各元件的故障特征阶次如表3所示。
[0061]
表1行星齿轮箱中齿轮参数
[0062][0063]
表2行星轴承结构参数
[0064][0065]
表3时变工况下行星齿轮箱中齿轮和行星轴承的特征阶次
[0066][0067]
可以理解的是,将振动加速度传感器布置在行星齿轮箱壳体的正上方,通过振动加速度传感器采集所述故障诊断实验台中行星齿轮箱太阳轮和轴承内圈复合故障信号。图3为采集的复合故障振动信号时域波形及其傅里叶频谱、包络谱和stft时频表示。从图3(a)可以看到,故障振动信号呈现出明显的冲击特征,但冲击之间的间隔逐渐减小;同时,在图3(b)和图3(c) 复合故障信号的傅里叶频谱与包络谱中均出现了频率模糊现象,无法提取到有用的特征信息;此外,从图3(d)复合故障信号的stft时频图中只能观察到idmm的变化趋势。因此,利用传统的时域分析、傅里叶频谱、包络谱和 stft时频分析方法都无法检测出行星齿轮箱复合故障。
[0068]
s120,对所述故障振动信号进行自适应模态分解,计算各模态分量的基尼指数gi
值,选取基尼指数gi值最大的模态信号作为敏感分量;
[0069]
需要说明的是,将步骤s110中采集到的复合故障振动信号进行iamcd自适应模态分解,模态重组后的分量如图4所示,选取gi值最大的m1模态作为敏感分量。
[0070]
其中,iamcd算法主要包含对原始acmd算法的改进和基于gi指标的模态重组方案两部分。acmd算法的具体实现过程如下:
[0071]
acmd采用匹配追踪的递归算法框架不需要提前输入分解模态数量,能够实现信号的自适应分解。对于多分量的调幅调频(am-fm)模型可表示为:
[0072][0073]
式中,k为信号分量的数量;ak(t),fk(τ)和分别表示第k个信号分量 xk(t)的瞬时幅值(ia)、瞬时频率(if)和初始相位。根据三角恒等式,可将上式改写为:
[0074][0075]
其中,
[0076][0077]
式中,bk(t)和dk(t)表示两个解调信号;为解调频率。acmd算法的思想是通过最小化解调信号bk(t)和dk(t)的带宽来提取目标分量并估计其瞬时频率(if)。对于第k个模态分量,acmd待求解的目标函数可表示为:
[0078][0079][0080]
式中,||
·
||2代表l2范数;(
·
)
″
表示二阶导数;μ>0为惩罚系数;和被用来测量带宽;表示去除当前估计分量后的剩余能量。
[0081]
acmd使当前分解信号的带宽和分解后剩余能量最小来提取目标信号分量。假设信号x(t)在t=t0,...,t
n-1
处离散,则上式的离散形式为:
[0082][0083]
式中,θ=diag[ω,ω],ω为二阶差分矩阵;uk=[(bk)
t
,(bk)
t
]
t
,其中 bk=[bk(t0),...,bk(t
n-1
)]
t
和dk=[dk(t0),...,dk(t
n-1
)]
t
;x=[xk(t0),...,xk(t
n-1
)]
t
,t0,...,t
n-1
表示采样时刻,上标t表示转置。矩阵hk与相关为:
[0084][0085]
[0086][0087][0088]
acmd算法采用交替更新解调信号和频率函数的迭代算法来进行求解。具体地,对于第m次迭代,向量uk被更新为:
[0089][0090]
式中,由频率函数构成,上标m为迭代计数器;参数μ用来控制输出信号的平滑度。然后,信号分量可以被估计为如下形式:
[0091][0092]
根据更新的uk,可以计算出频率增量为:
[0093][0094]
式中,和分别表示第m次迭代获得的解调信号。
[0095]
因此,if最终被更新为:
[0096][0097]
式中,i为单位矩阵;作为低通滤波器,为调节因子,其值越小输出的if越平滑。
[0098]
随后,对所包含的变量进行迭代更行,直到两次更新模态差值的能量比最后一次更新足够小时则停止迭代,即ε1为终止阈值,本发明中取ε1=1e-2。通过反复迭代求解,最终得到原信号x(t)的各分量为:
[0099][0100]
式中,为获得的第k个模态分量;rk(t)为剩余分量。
[0101]
本发明为提高acmd算法的效率和鲁棒性,将目标函数中的解调频率简化为一个常数,即令则瞬时频率(if)被修改为如下形式:
[0102][0103]
式中,mean{
·
}代表均值;是一个常数,称为acmd第n次迭代的中心频率;
为瞬时频率增量。因此,iacmd算法是通过检测信号傅里叶频谱中的峰值频率来实现频率初始化,从而将信号分解成一系列不同频带的模态分量。
[0104]
由于时变工况下行星齿轮箱故障引起的冲击频率变化范围较广,具有宽带特性,因此,acmd该算法可能存在过度分解的问题。为解决这一问题,本发明中iacmd算法采用一种基于基尼指数(gi)的信号模态选择和重组方案。 gi的计算公式如下:
[0105][0106]
式中,||
·
||1表示l1范数;n为分析信号的长度;se为被分析信号平方包络的离散时间序列,ser是se的升序排列(即,ser[1]≤ser[2]≤...≤ser[n])。se 的计算公式如下:
[0107][0108]
式中,为实值信号x的解析信号;h(
·
)为hilbert变换;j2=-1。
[0109]
设acmd将信号分解为k个模态分量,将这些模态分量按其gi值降序排列,即即为获得的模态分量。然后,模态重组方案可以描述为:
[0110]
其中m<n且m,n∈k
[0111]
从信号中除去
[0112]
end
[0113]
重复执行上述过程,直到任意两个模态分量合并后的gi值不再增加为止。
[0114]
s130,从所采集的故障振动信号的短时傅里叶stft时频表示中提取idmm 趋势线,并将所述idmm趋势线等效为参考轴的转频;
[0115]
可以理解的是,使用快速路径寻优(fpo)算法从s110中获取的复合故障振动信号的短时傅里叶(stft)时频表示中提取idmm趋势线f
′m(t)并将其等效为参考轴的转频f
sr
(t),从而为角域重采样提供基础。提取结果如图5所示。可以观察到,等效转频与实际的转频变化趋势完全吻合,且最大相对误差低于3%。
[0116]
其中,idmm趋势线等效为参考轴转频的计算过程为:
[0117][0118]
式中,g=1,2,...,g,g为啮合频率的最大倍数;fm(t)为齿轮啮合频率;zs和 zr分别为太阳轮和齿圈的齿数。
[0119]
s140,基于等效的参考轴的转频对所述敏感分量进行角域重采样,获得平稳的角域信号;
[0120]
需要说明的是,采用等效的转频将时变非平稳的振动信号映射到稳定的角域能够消除时变转速所产生的影响。本发明通过s130等效的参考轴的转频对获得的敏感分量进行角域重采样,从而获得平稳的角域信号。
[0121]
s150,对所述角域信号进行解卷积处理;
[0122]
可以理解是,采用acycbd算法对获取的角域信号进行解卷积处理来提升角域信号中微弱的故障冲击特征。图6(a)为角域信号的自相关包络谱。可以看到,谱图中在太阳轮故
障特征阶次的n/3倍n/3os(n=1,2,...,5)处,行星轴承内圈故障特征阶次oi,以及行星架旋转阶次的一倍至三倍moc(m=1,2,3)处存在明显的峰值。由此,可初步判断太阳轮和行星轴承内圈出现了故障,因此分别选取α1=1/3os=0.8342和α2=oi=2这两个特征阶次作为acycbd的循环频率。图6(b)和图6(c)分别为循环频率α1=0.8342和α2=2时滤波器长度与滤波信号esk值之间的关系。当l1=260和l2=370时分别取得最大的esk值,因此最优滤波器长度分别确定为260和370。最后,在最佳参数组合[0.8342,260] 下,采用acycbd对角域信号进行最佳解卷积处理得到解卷积信号一,如图7 (a)所示。可以看到,解卷积信号一中呈现出清晰的等间隔冲击特征。此外,在最佳参数组合[2,370]下得到的解卷积信号二,如图7(a)所示;同样地,解卷积后表征故障的冲击成分被清晰地揭示出来。
[0123]
本发明中的acycbd算法具体包含原始cycbd算法和参数自适应选取过程。其中,cycbd算法旨在从含噪声的测量信号x中提取出故障冲击信号s,即:
[0124]
s=xh
[0125][0126]
其中,h为滤波器系数矩阵;n和l分别是x和h的长度。对离散时间信号,循环频率的定义为:
[0127][0128]
式中,ts为与故障冲击发生的周期,可认为是与齿轮和轴承故障相关的特征频率。
[0129]
定义评价信号s的二阶循环平稳程度(second-order cyclostationarity, ics2)的表达式为:
[0130][0131]
其中,
[0132][0133][0134]
上面两个公式可进一步表示为矩阵形式为:
[0135][0136][0137]
其中,
[0138][0139]
e=[e
1 ... e
k ... ek]
[0140]ek
=[e-j2πkα(l-1) ... e-j2πkα(n-1)
]
t
[0141]
根据上述公式,ics2可重新表示为:
[0142][0143]
将s=xh代入上式中,则ics2的表达式可改变为如下形式:
[0144][0145]
其中,r
xx
与r
xwx
分别表示相关矩阵和加权相关矩阵。加权矩阵w为:
[0146][0147]
cycbd算法将ics2作为解卷积的目标函数,则可表示为:
[0148][0149]
寻找最优逆滤波器h0等价于求解式中r
xwx
和r
xx
的最大广义特征值v对应的最大特征向量,即:r
xwx
h=r
xx
hλ。
[0150]
因此,cycbd算法提取故障冲击的具体步骤如下:
[0151]
(1)输入测量信号x,计算相关矩阵r
xx
;
[0152]
(2)确定循环频率a、滤波器长度l、收敛准则ε2、最大迭代次数n
max
等参数,用逆ar滤波器猜测一个初始滤波器;
[0153]
(3)计算滤波后的信号s,加权矩阵w和加权相关矩阵r
xwx
;
[0154]
(4)求解式r
xwx
h=r
xx
hλ中的特征值问题找到最大特征值λ对应的h;
[0155]
(5)如果不满足收敛条件,返回第(3)步,重新计算直至收敛。
[0156]
本发明中cycbd算法的收敛条件为:迭代达到最大次数n
max
或 |λ
i-λ
i-1
|/|λ
i-1
|<ε2;其中,λi和λ
i-1
分别为本次迭代和上次迭代中得到的特征值。
[0157]
此外,cycbd算法中循环周期频率α和最佳滤波器长度l这两个关键参数的确定准则为:
[0158]
(1)循环周期频率α的确定:利用包络信号自相关函数的局部最大值 r(τ
max
)对应的滞后位置τ
max
来确定信号的循环周期频率。其中,自相关函数计算公式为:
[0159]
r(τ)=∫e(t)e(t τ)dτ
[0160]
式中,r(τ)为自相关函数,e(t)为信号的包络;τ为滞后的时刻点;;τ
max
为让e(t)的包络自相关谱达到局部最大值的滞后时刻点。
[0161]
(2)滤波器长度l的确定:首先,设置滤波器长度选取范围为: 10≤l≤500;然后,采用包络谱峭度(envelope spectrum kurtosis,esk) 来选取最佳的滤波器长度,当包络
谱峭度达到最大值时对应的滤波器长度即为最佳滤波器长度。其中,包络谱峭度的计算公式为:
[0162][0163]
式中,en(f)表示包络谱的幅值;ue为en(f)的均值;n为信号的长度。
[0164]
s160,对解卷积后的角域信号进行包络解调处理,获得包络谱,并从所述包络谱中提取故障特征阶次信息与理论值对比,判别行星齿轮箱的故障类型
[0165]
需要说明的是,对解卷积后的信号做包络解调处理,从其包络谱中提取故障特征阶次并与理论值对比,从而判别行星齿轮箱的故障类型。图7(b) 为对应解卷积信号一的包络谱。从图中我们可以看到,在太阳轮故障特征阶次的n/3倍n/3os(n=1,2,...,7)处存在突出的谱峰,且在整个谱图中占主导地位。据此可判断太阳轮出现了故障。图7(d)为对应解卷积信号二的包络谱。可以看到,在行星轴承内圈故障特征阶次oi及其二倍、四倍2oi和4oi处存在明显的谱峰。上述特征说明行星轴承内圈出现了故障。至此,太阳轮和行星轴承内圈故障均被准确、全面地诊断出来,这与实验设置相一致,并未出现故障漏诊和误判现象。从而验证了本发明的有效性和准确性。
[0166]
本发明能够成功地实现时变非平工况下行星齿轮箱复合故障特征信息的准确、全面提取,实现复合故障的准确判别与诊断。本发明中iacmd通过检测信号傅里叶频谱中的峰值来实现频率初始化,并在分解过程中采用基于基尼gi指数的模态重组方案来避免信号过度分解。同时,本发明无需额外的转速测量装置作为辅助,使用快速路径寻优算法能够精确提取瞬时主导啮合倍频并等效为参考轴的转频,从而实现非平稳信号的角域重采样,这大大节省了设备状态监测与运维的成本。此外,本发明针对cycbd算法缺乏自适应性的问题,提出了循环周期频率和最佳滤波器长度这两个关键参数的确定准则,从而有效地提升了算法的自适应性及对微弱故障冲击的增强能力。本发明可实现对复合故障特征的准确、全面提取,有效地避免了故障漏诊和误判现象,具有较高的诊断精确度。
[0167]
上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。