1.本技术涉及截骨导板安装技术领域,具体而言,涉及一种截骨导板的定位安装方法、系统、电子设备及存储介质。
背景技术:
2.目前,在安装截骨导板的过程中,会因导板尺寸较大而需要剥离大面积的软组织来安放截骨导板,会对患者造成二次伤害。有些设计比较小的截骨导板在术中很难准确的安放到位,需要c臂机透视辅助安装,不仅会对人体造成二次伤害,还会增加手术时间。
技术实现要素:
3.本技术实施例的目的在于提供一种截骨导板定位安装方法,用以提高截骨导板定位安装方法的效率,并避免对人体造成二次伤害。
4.第一方面,本技术实施例提供了一种截骨导板定位安装方法,包括:获取目标对象的待截骨头的结构定位点;将截骨导板上的定位部与所述结构定位点相扣合;转动所述截骨导板,使所述截骨导板与所述待截骨头的骨面相贴合。
5.在上述实现过程中,结构定位点为骨骼上的特殊结构特征点,通过将其作为截骨导板定位安装的基准点,可有效提高截骨导板安装定位的快捷性。在确定目标对象的骨骼上的结构定位点之后,可通过将截骨导板上的定位部与结构定位点相扣合,以作为截骨导板安装的定位基点。其中,定位部与结构定位点的形状相适配,且定位部可以是定位槽或定位孔等。然后再以结构定位点为基点,通过转动截骨导板,以使截骨导板与目标对象的骨面完全贴合,从而实现截骨导板的快速定位安装。通过本技术的方案,能够大大缩短截骨导板的安装时间,同时缩短了手术时间,降低了患者术中的风险。且大大降低了透视次数,减少了对患者和医生的透视伤害。此外,可将截骨导板的设计控制到最小、最稳定状态,以减少截骨导板安装对患者的二次伤害。
6.在一种可能的实现方式中,所述获取目标对象的待截骨头的结构定位点,包括:获取所述目标对象的待截骨头上的多个解剖结构点,以及获取所述目标对象的切口位置;计算多个所述解剖结构点中各个解剖结构点至所述切口位置的距离;将所述距离中最小的一个所对应的解剖结构点作为所述结构定位点。
7.在一种可能的实现方式中,所述获取所述目标对象的待截骨头上的多个解剖结构点,包括:扫描目标对象的目标位置的骨骼图像;将所述骨骼图像导入医疗影像重建软件,并建立所述目标位置的骨骼模型;根据所述骨骼模型获取所述待截骨头上的多个解剖结构点。
8.在一种可能的实现方式中,所述定位部被配置为所述截骨导板上的观察孔;在所述将截骨导板上的定位部与所述结构定位点相扣合之后,还包括:查看所述结构定位点是否位于所述观察孔内;若所述结构定位点未位于所述观察孔内,则调整所述观察孔的位置,使所述结构定位点位于所述观察孔内。
9.在一种可能的实现方式中,所述截骨导板包括导板主体和与导板主体相连的定位导板,所述导板主体包括第一导板和与所述第一导板相连的第二导板,所述第一导板和所述第二导板朝向所述待截骨头的一侧分别限定有第一接触面和第二接触面,所述定位导板朝向所述待截骨头的一侧限定有第三接触面;所述转动所述截骨导板,使截骨导板与所述待截骨头的骨面相贴合,包括:转动所述截骨导板,使所述第一接触面、所述接触面和所述第三接触面均与所述待截骨头的骨面相贴合。
10.在一种可能的实现方式中,所述第一导板上间隔设置有至少两个第一导针孔,所述定位导板背离所述骨面的一侧设有第二导针孔;在所述第一接触面、所述接触面和所述第三接触面均与所述待截骨头的骨面相贴合之后,还包括:在至少两个所述第一导针孔内打入导针,并在所述第二导针孔内打入第二导针。
11.在一种可能的实现方式中,所述截骨导板上设置有按压块;所述在至少两个所述第一导针孔内打入导针,并在所述第二导针孔内打入第二导针之前,还包括:按压所述按压块。
12.第二方面,本技术实施例提供了一种截骨导板定位安装系统,包括:获取模块,用于获取目标对象的待截骨头的结构定位点;安装模块,用于将截骨导板上的定位部与所述结构定位点相扣合;调整模块,用于转动所述截骨导板,使所述截骨导板与所述待截骨头的骨面相贴合。
13.第三方面,本技术实施例提供了一种电子设备,包括处理器以及存储器,所述存储器存储有计算机可读取指令,当所述计算机可读取指令由所述处理器执行时,运行如第一方面实施例中任一项所述的方法。
14.第四方面,本技术实施例提供了一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如第一方面实施例中任一项所述的方法。
15.本技术第一方面实施例提供的截骨导板的定位安装方法,通过将结构定位点作为截骨导板定位安装的基准点,可有效提高截骨导板安装定位的快捷性。在确定目标对象的骨骼上的结构定位点之后,可通过将截骨导板上的定位部与结构定位点相扣合,以作为截骨导板安装的定位基点。其中,定位部与结构定位点的形状相适配,且定位部可以是定位槽或定位孔等。然后再以结构定位点为基点,通过转动截骨导板,以使截骨导板与目标对象的骨面完全贴合,从而实现截骨导板的快速定位安装。通过本技术的方案,能够大大缩短截骨导板的安装时间,同时缩短了手术时间,降低了患者术中的风险。且大大降低了透视次数,减少了对患者和医生的透视伤害。此外,可将截骨导板的设计控制到最小、最稳定状态,以减少截骨导板安装对患者的二次伤害。
附图说明
16.为了更清楚地说明本技术实施例的技术方案,下面将对本技术实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
17.图1为本技术实施例提供的一种截骨导板定位安装方法的流程示意图;
18.图2为本技术实施例提供的一种截骨导板定位安装设备的结构示意框图;
19.图3为本技术实施例提供的电子设备的结构示意框图。
20.图标:100、截骨导板定位安装系统;101、获取模块;102、安装模块;103、调整模块;200、电子设备;201、处理器;202、存储器。
具体实施方式
21.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
22.应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。同时,在本技术的描述中,术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
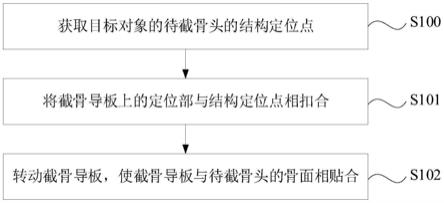
23.请参考图1,第一方面,本技术实施例提供了一种截骨导板定位安装方法,包括:
24.步骤s100:获取目标对象的待截骨头的结构定位点。
25.步骤s101:将截骨导板上的定位部与结构定位点相扣合。
26.步骤s102:转动截骨导板,使截骨导板与待截骨头的骨面相贴合。
27.在上述实现过程中,结构定位点为骨骼上的特殊结构特征点,通过将其作为截骨导板定位安装的基准点,可有效提高截骨导板安装定位的快捷性。在确定目标对象的骨骼上的结构定位点之后,可通过将截骨导板上的定位部与结构定位点相扣合,以作为截骨导板安装的定位基点。其中,定位部与结构定位点的形状相适配,且定位部可以是定位槽或定位孔等。然后再以结构定位点为基点,通过转动截骨导板,以使截骨导板与目标对象的骨面完全贴合,从而实现截骨导板的快速定位安装。通过本技术的方案,能够大大缩短截骨导板的安装时间,同时缩短了手术时间,降低了患者术中的风险。且大大降低了透视次数,减少了对患者和医生的透视伤害。此外,可将截骨导板的设计控制到最小、最稳定状态,以减少截骨导板安装对患者的二次伤害。
28.在一种可能的实现方式中,获取目标对象的待截骨头的结构定位点,包括:获取目标对象的待截骨头上的多个解剖结构点,以及获取目标对象的切口位置;计算多个解剖结构点中各个解剖结构点至切口位置的距离;将距离中最小的一个所对应的解剖结构点作为结构定位点。
29.在上述实现过程中,由于骨骼分布有多个解剖结构点,为保证截骨导板定位安装的位置与切口位置相匹配,可通过计算多个解剖结构点距离目标对象的切口位置(即手术切口位置)最近的一个点作为与截骨导板安装时定位的结构定位点,以提高截骨导板定位安装时安装位置的准确性。
30.具体地,结构定位点为胫骨平台后解剖凸起肌肉的止点。
31.在一种可能的实现方式中,获取目标对象的待截骨头上的多个解剖结构点,包括:扫描目标对象的目标位置的骨骼图像;将骨骼图像导入医疗影像重建软件,并建立目标位置的骨骼模型;根据骨骼模型获取待截骨头上的多个解剖结构点。
32.在上述实现过程中,在获取目标对象的待截骨头上的多个解剖结构点时,可通过ct扫描仪先扫描目标对象的目标位置(如腿部)的骨骼,再导入医疗影像重建软件进行目标位置的骨骼模型重建,依据骨骼模型上的结构特征以及数据分析情况从而可得到目标位置的多个解剖结构点。
33.在一种可能的实现方式中,定位部被配置为截骨导板上的观察孔;在将截骨导板
上的定位部与结构定位点相扣合之后,还包括:查看结构定位点是否位于观察孔内;若结构定位点未位于观察孔内,则调整观察孔的位置,使结构定位点位于观察孔内。
34.在上述实现过程中,在将截骨导板上的观察孔与目标对象的结构定位点相扣合后,可通过观察孔观察结构定位点是否处于观察孔内,即验证定位部与结构定位点的扣合位置是否扣合到位,若结构定位点未在观察孔内,则需要调整观察孔的位置,使结构定位点位于观察孔内,以确定定位部的设置位置定位准确,进而可保证截骨导板的定位安装的位置准确。若结构特征点位于观察孔内,则直接以结构特征点为圆心,转动截骨导板并使截骨导板与待截骨头的骨面相贴合即可。
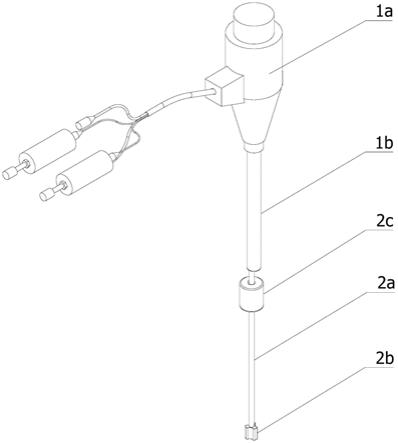
35.在一种可能的实现方式中,截骨导板包括导板主体和与导板主体相连的定位导板,导板主体包括第一导板和与第一导板相连的第二导板,第一导板和第二导板朝向待截骨头的一侧分别限定有第一接触面和第二接触面,定位导板朝向待截骨头的一侧限定有第三接触面;转动截骨导板,使截骨导板与待截骨头的骨面相贴合,包括:转动截骨导板,使第一接触面、接触面和第三接触面均与待截骨头的骨面相贴合。
36.在上述实现过程中,导板主体呈l型,且第一导板与第二导板之间的夹角呈钝角,导板主体呈镂空的椭圆形,导板主体远离导板主体的一端设有观察孔,其中,第一导板和第二导板朝向骨面的一侧分别限定有第一接触面和第二接触面,导板主体朝向骨面的一侧限定有第三接触面,截骨导板与待截骨头的骨面相贴合,具体是指第一接触面、第二接触面和第三接触面均与骨面相贴合,以保证截骨导板安装到位。
37.在一种可能的实现方式中,第一导板上间隔设置有至少两个第一导针孔,定位导板背离骨面的一侧设有第二导针孔;在第一接触面、接触面和第三接触面均与待截骨头的骨面相贴合之后,还包括:在至少两个第一导针孔内打入导针,并在第二导针孔内打入第二导针。
38.在上述实现过程中,在第一接触面、第二接触面和第三接触面均与待截骨头的骨面相贴合后,需要在第一导针孔和第二导针孔内分别打入导针,以固定截骨导板。
39.在一种可能的实现方式中,截骨导板上设置有按压块;在至少两个第一导针孔内打入导针,并在第二导针孔内打入第二导针之前,还包括:按压按压块。
40.在上述实现方式中,通过按压截骨导板上的按压块,可防止在向第一导针孔和第二导针孔内打入导针时截骨导板发生偏移,从而可进一步提高截骨导板定位安装时安装位置的准确性。
41.请参考图2,第二方面,本技术实施例提供了一种截骨导板定位安装系统100,包括:获取模块101,用于获取目标对象的待截骨头的结构定位点;安装模块102,用于将截骨导板上的定位部与结构定位点相扣合;调整模块103,用于转动截骨导板,使截骨导板与待截骨头的骨面相贴合。
42.具体地,获取模块101可以为ct扫描仪或医疗影像重建软件等,通过先扫描得到目标对象的待截骨头的骨骼图像,然后再根据骨骼图像对目标对象的待截骨头进行骨骼重建,从而根据重建的骨骼的结构特征得到待截骨头上的结构定位点。安装模块102和调整模块103可以被配置为机器人上的机械臂等动作执行模块。
43.请参考图3,第三方面,本技术实施例提供了一种电子设备200,包括处理器201以及存储器202,所述存储器202存储有计算机可读取指令,当所述计算机可读取指令由所述
处理器201执行时,运行如第一方面实施例中任一项所述的方法。
44.具体地,电子设备200可以为机器人等智能化设备,通过机器人等智能化设备的动作执行模块来实现截骨导板的定位安装。其中,动作执行模块可以为图像采集模块和机械臂等结构。
45.第四方面,本技术实施例提供了一种可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时运行如第一方面实施例中任一项所述的方法。
46.本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
47.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
48.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
49.尽管已描述了本技术的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例做出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本技术范围的所有变更和修改。
50.显然,本领域的技术人员可以对本技术进行各种改动和变型而不脱离本技术的精神和范围。这样,倘若本技术的这些修改和变型属于本技术权利要求及其等同技术的范围之内,则本技术也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。