技术特征:
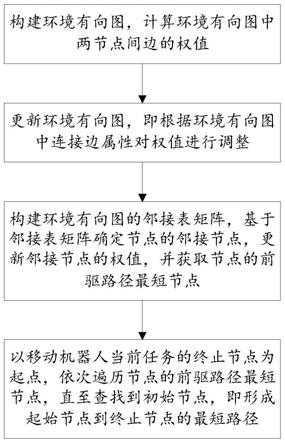
1.一种基于邻接表的路径规划方法,其特征在于,所述方法具体包括如下步骤:s1、构建环境有向图,计算环境有向图中两节点间边的权值;s2、更新环境有向图,即根据环境有向图中连接边属性对权值进行调整;s3、构建环境有向图的邻接表矩阵l[v],基于邻接表矩阵l[v]确定节点的邻接节点集,更新邻接节点的权值,并获取节点的前驱路径最短节点;s4、以移动机器人当前任务的终止节点v
e
为起点,依次遍历节点的前驱路径最短节点,直至查找到初始节点v0,即形成起始节点v0到终止节点v
e
的最短路径。2.如权利要求1所述基于邻接表的路径规划方法,其特征在于,节点的前驱路径最短节点获取方法具体如下:s33、获取距移动机器人当前所处位置最近的起始节点v0;s34、基于邻接表矩阵l[v]确定起始节点对应邻接节点集合,依次遍历集合中所有邻接节点,选取与起始节点v0间权值d[v]最小邻接节点v
l
;s35、将起始节点v0的邻接节点v
l
添加至链表path中;s36、检测链表path中节点数为空,若检测结果为是,则退出当前循环,若检测结果为否,则在链表path中查找权值d[v
m
]最小的节点v
m
;s37、基于邻接表矩阵l[v]读取节点v
m
的所有邻接节点,针对每个邻接节点v
j
执行如下步骤:比较权值d[v
j
]与权值d[v
m
] w
mj
的大小,若d[v
j
]>d[v
m
] w
mj
,则令d[v
j
]=d[v
m
] w
mj
,并将节点v
j
添加至链表path中,同时将节点v
j
前驱最短路径节点设置为p[v
j
]=v
m
。遍历节点v
m
的所有邻接节点后,在链表path中剔除节点v
m
,执行步骤s36。3.如权利要求1所述基于邻接表的路径规划方法,其特征在于,邻接表矩阵l[v]由所有节点的邻接表组成,节点v
i
的邻接表构建方法具体如下:s31、在环境有向图中获取节点v
i
的所有邻接节点v
l
;s32、添加从节点v
i
到各邻接节点v
l
的指针,即生成了节点v
i
的邻接表。4.如权利要求1所述基于邻接表的路径规划方法,其特征在于,若节点j是节点i邻接节点,则权值更新方法如下:其中,w
′
ij
为更新的权值,在节点i与节点j间的边为直线时,w
′
ij
=w
ij
;在节点i与节点j间的边为曲线时,w
′
ij
=α
·
w
ij
,α为曲线路径的权值放大系数,节点i与节点j间边的权值计算公式具体如下:其中,(x1,y1)、(x2,y2)分别表示节点i、节点j在环境有向地图中的坐标。
技术总结
本发明公开的一种基于邻接表的路径规划方法,包括如下步骤:S1、构建环境有向图,计算环境有向图中两节点间边的权值;S2、更新环境有向地图,即根据环境有向图中连接边属性对权值进行调整;S3、构建环境有向图的邻接表矩阵,基于邻接表矩阵确定节点的邻接节点,更新邻接节点的权值,并获取节点的前驱路径最短节点;S4、以移动机器人当前任务的终止节点v
技术研发人员:孙龙龙 陈双 郑亮 曹雏清 赵立军
受保护的技术使用者:哈尔滨工业大学芜湖机器人产业技术研究院
技术研发日:2021.12.13
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。