1.本发明涉及太阳能技术领域,特别涉及一种日向自动化跟踪测定方法。
背景技术:
2.太阳能的高效利用离不开日向跟踪技术,以光伏发电为例,具备双向日向跟踪性能的光伏电板较传统的固定式光伏电板,其太阳能利用效率提升33%,而对于聚光发电、集热类的系统,日向跟踪技术更是必不可少。
3.目前,日向测定主要有两种方法:一类是直接根据天文学计算公式,通过经纬度位置、时间时刻得出的日向数据,这种方法精度较高,但系统布置相对复杂且昂贵;另一类是利用光敏元件的特性建立被动式日向跟踪监测装置,由于传感器及转动装置等元件存在误差,导致该被动式日向跟踪监测装置的日向测定存在5
°
~8
°
的角度偏差,但这个角度偏差所带来的能源利用效率不容忽视,因此,如何设计一种具有较高精度的日向测定方法具有较高的应用价值。
技术实现要素:
4.针对现有的被动式日向跟踪监测装置的日向测定存在角度偏差,降低了能源利用效率的问题。本发明的目的是提供一种日向自动化跟踪测定方法。
5.本发明解决其技术问题所采用的技术方案是:一种日向自动化跟踪测定方法,步骤如下:
6.s1:安装日向自动化跟踪测定装置,所述日向自动化跟踪测定装置包括双轴旋转平台、四个第一光敏传感器、暗仓、光敏传感器组件、动力装置及控制模组;呈筒状的暗仓垂直连接于所述双轴旋转平台的中央,四个所述第一光敏传感器沿正交方向均布于所述双轴旋转平台的边缘,相对设置的每对所述第一光敏传感器的连线与所述双轴旋转平台的中心重合,所述光敏传感器组件设置于所述暗仓内腔并能够在所述动力装置的推动下沿暗仓的轴线移动,所述光敏传感器组件包括沿正交方向紧密贴合排列的四个第二光敏传感器,相对设置的每对所述第二光敏传感器的连线与所述双轴旋转平台的中心重合,所述双轴旋转平台、第一光敏传感器、光敏传感器组件及动力装置均与所述控制模组连接,对所述日向自动化跟踪测定装置进行初始化设定,一对所述第一光敏传感器和一对所述第二光敏传感器的连线与x轴重合,另一对所述第一光敏传感器和所述第二光敏传感器的连线与y轴重合;
7.s2:根据沿x轴或y轴相对设置的一对第一光敏传感器所接收到的光强差异判断双轴旋转平台是否绕y轴或x轴转动,直至相对设置的两个第一光敏传感器的光强差异低于δe,从而调整日向自动化跟踪测定装置的姿态;
8.s3:通过动力装置提升设置于暗仓底部的光敏传感器组件,直至光敏传感器组件接收到日光,锁定光敏传感器组件的爬升高度,根据光敏传感器组件沿x轴或y轴相对设置的一对第二光敏传感器所接收到的光强差异判断双轴旋转平台是否绕y轴或x轴转动,直至相对设置的两个第二光敏传感器的光强差异低于δe,使得日向自动化跟踪测定装置的指
向锁定日向,将调整角度存储于控制模组,并依据所述调整角度计算出此时的日向角度。
9.本发明的日向自动化跟踪测定方法,先根据沿x轴或y轴相对设置的一对第一光敏传感器所接收到的光强差异控制双轴旋转平台绕y轴或x轴转动,直至沿正交方向设置的两对第一光敏传感器的光强差异低于设定标准,使得该自动化跟踪测定装置的指向接近日向;初步定位后,再利用动力装置提升设置于暗仓底部的光敏传感器组件,直至光敏传感器组件接收到日光即锁定其爬升高度,根据光敏传感器组件沿x轴或y轴相对设置且紧密贴合排列的两对第二光敏传感器所接收到的光强差异控制双轴旋转平台绕y轴或x轴转动,直至沿正交方向设置的两对第二光敏传感器的光强差异低于设定标准,该使用方法先利用正交设置于双轴旋转平台边缘的两对第一光敏传感器进行一级日向追踪,再利用正交设置于暗仓内的两对第二光敏传感器进行二级方向校准,经检测其测定误差能够控制在1
°
以下,从而大幅提高了日向测定的精度,实现了太阳能的高效利用,而且,相对基于天文学原理的主动计算测定方法而言,该使用方法运算简单,降低了成本,适用性更强。
10.更进一步,所述步骤s1中,双轴旋转平台顶部还安装有透光防尘罩,透光防尘罩呈半球形的透明壳体,透光防尘罩与双轴旋转平台共同构成一密闭空间,暗仓、光敏传感器组件、动力装置及控制模组均位于密闭空间内。
11.更进一步,所述步骤s1中,透光防尘罩内侧还安装有隔光罩,隔光罩包括竖向设置于第一光敏传感器和暗仓之间的筒状罩体,及设置于暗仓顶部的弧形罩体,且筒状罩体与弧形罩体连接为一体,弧形罩体顶部设有与暗仓位置相对应的进光孔。
12.更进一步,所述步骤s1中,动力装置采用气泵,暗仓的侧壁分别设有进气口和出气口,进气口设置于光敏传感器组件下方,出气口设置于光敏传感器组件上方,气泵通过管道分别与进气口和出气口连通,且管道上设有单向阀门。
13.更进一步,所述步骤s3中,在日向自动化跟踪测定装置初步定位后,控制模组通过控制气泵向暗仓内腔注入气体,推动光敏传感器组件沿暗仓轴线向上爬升,直至光敏传感器组件接收到日光,控制模组控制气泵停止注入气体,锁定光敏传感器组件的爬升高度,在辅助日向自动化跟踪测定装置精确对准日向之后,控制模组控制气泵抽出暗仓内腔气体,光敏传感器组件降至暗仓底部。
14.更进一步,所述步骤s3还包括,利用动力装置分级回退光敏传感器组件,根据四个第二光敏传感器接收的光强差异,结合双轴旋转平台进行日向自动化跟踪测定装置姿态的分级调整,并通过控制模组中存储的各级调整过程中日向自动化跟踪测定装置在x轴和y轴两个方向上的历次调整角度,计算出此时的日向角度。
15.更进一步,所述步骤s3中,光强差异δe取位于x轴或y轴上相对设置的两个第一光敏传感器所测光强度值中较大值的5%~10%,光强差异δe取位于x轴或y轴上相对设置的两个第二光敏传感器所测光强度值中较大值的5%~10%。
附图说明
16.图1为本发明一实施例的日向自动化跟踪测定装置的结构示意图;
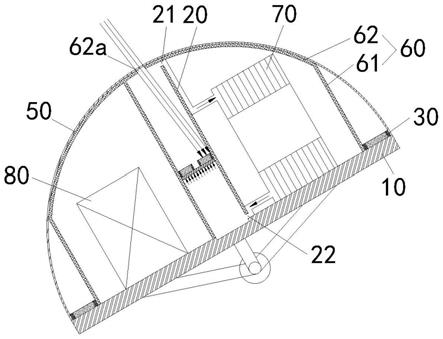
17.图2为图1的a-a剖视图;
18.图3至图7为本发明的日向自动化跟踪测定方法一实施例中各步骤的示意图。图中标号如下:
19.双轴旋转平台10;暗仓20;进气口22;出气口21;第一光敏传感器30;光敏传感器组件40;芯盘41;第二光敏传感器42;透光防尘罩50;隔光罩60;筒状罩体61;弧形罩体62;进光孔62a;气泵70;控制模组80。
具体实施方式
20.以下结合附图和具体实施例对本发明作进一步详细说明。需说明的是,附图均采用非常简化的形式且均使用非精准的比例,仅用以方便、明晰地辅助说明本发明实施例的目的。为叙述方便,下文中所述的“上”、“下”与附图的上、下的方向一致,但这不能成为本发明技术方案的限制。
21.如图1所示,以自动化跟踪测定装置的高度延伸方向为z轴建立xyz直角坐标系,其中,y轴平行于地球自转轴(即地球绕其质心转动的轴线),下面结合图1至图7说明本实施例的日向自动化跟踪测定装置,它包括:双轴旋转平台10、四个第一光敏传感器30、暗仓20、光敏传感器组件40、动力装置及控制模组80;呈筒状的暗仓20垂直连接于双轴旋转平台10的中央,四个第一光敏传感器30沿正交方向均布于双轴旋转平台10的边缘,即两个第一光敏传感器30沿x轴相对设置,另外两个第一光敏传感器30沿y轴相对设置,相对设置的每对第一光敏传感器30的连线与双轴旋转平台10的中心重合,光敏传感器组件40设置于暗仓20内腔并能够在动力装置的推动下沿暗仓20的轴线移动,光敏传感器组件40包括沿正交方向紧密贴合排列的四个第二光敏传感器42,即两个第二光敏传感器42沿x轴相对设置,另外两个第二光敏传感器42沿y轴相对设置,相对设置的每对第二光敏传感器42的连线与双轴旋转平台10的中心重合,双轴旋转平台10、第一光敏传感器30、光敏传感器组件40及动力装置均与控制模组80连接。
22.首先,根据沿x轴相对设置的两个第一光敏传感器30所接收到的光强差异判断双轴旋转平台10是否绕y轴转动,直至沿x轴相对设置的两个第一光敏传感器30的光强差异低于δe,同理,根据沿y轴相对设置的两个第一光敏传感器30所接收到的光强差异判断双轴旋转平台10是否绕x轴转动,直至沿y轴相对设置的两个第一光敏传感器30的光强差异低于δe,使得该自动化跟踪测定装置的指向接近日向,此时,日光以一定角度抵达暗仓20内部,利用动力装置提升设置于暗仓20底部的光敏传感器组件40,直至光敏传感器组件40接收到日光即锁定光敏传感器组件40的爬升高度,根据光敏传感器组件40沿x轴相对设置的两个第二光敏传感器42所接收到的光强差异判断双轴旋转平台10是否绕y轴转动,直至沿x轴相对设置的两个第二光敏传感器42的光强差异低于δe,同理,根据光敏传感器组件40沿y轴相对设置的两个第二光敏传感器42所接收到的光强差异判断双轴旋转平台10是否绕x轴转动,直至沿y轴相对设置的两个第二光敏传感器42的光强差异低于δe,至此,日向自动化跟踪测定装置的指向精确锁定日向;该日向自动化跟踪测定装置先利用正交设置于双轴旋转平台10边缘的两对第一光敏传感器30进行一级日向追踪,再利用正交设置于暗仓20内的两对第二光敏传感器42进行二级方向校准,紧密贴合排列的两对第二光敏传感器42的设置使得光强差异的测定更加精确,经检测其测定误差能够控制在1
°
以下,从而大幅提高了日向测定的精度,实现了太阳能的高效利用,而且,相对基于天文学原理的主动测定方法而言,该日向自动化跟踪测定装置基于光敏传感器以及控制模组80即可实现日向测定,控制模组80对芯片的要求更低,降低了成本,适用性更强。
23.更进一步,由于光敏传感器长时间暴露必将受到污染,导致日向测定失效,为解决该问题,如图2所示,本发明的日向自动化跟踪测定装置还包括透光防尘罩50,透光防尘罩50呈半球形的透明壳体,透光防尘罩50设置于双轴旋转平台10顶部并与其构成一密闭空间,暗仓20、光敏传感器组件40、动力装置及控制模组80均位于密闭空间内,半球形的透明壳体对外部各个方向的日光均有较好的透射效果,更重要的是,透光防尘罩50能够避免光敏传感器被尘土覆盖形成非对称误差,导致所测得光强在平衡状态下,日向自动化跟踪测定装置无法有效对准日向。
24.如图2所示,本实施例的动力装置采用气泵70,暗仓20的侧壁分别设有进气口22和出气口21,进气口22设置于光敏传感器组件40下方,出气口21设置于光敏传感器组件40上方,气泵70通过管道分别与进气口22和出气口21连通,且管道上设有单向阀门(图中未示出),在日向自动化跟踪测定装置完成初步定位后,控制模组80通过控制气泵70向暗仓20内腔注入气体,进而推动光敏传感器组件40沿暗仓20轴线向上爬升,直至光敏传感器组件40接收到日光,控制模组80控制气泵70停止注入气体,锁定光敏传感器组件40的爬升高度,如图7所示,在辅助日向自动化跟踪测定装置精确对准日向之后,控制模组80控制气泵70抽出暗仓20内腔气体,光敏传感器组件40降至暗仓20底部。本实施例的动力装置的形式仅是一个示例,并不局限于此。
25.请继续参考图2,光敏传感器组件40还包括芯盘41,四个第二光敏传感器42沿正交方向紧密排列并固定于芯盘41顶部,芯盘41的外径与暗仓20的内径相适应,芯盘41设置于暗仓20内腔并能够沿其轴线竖向滑动,暗仓20内壁进气口22上方沿径向设有卡槽,使得光敏传感器组件40能够悬空支撑于进气口22上方,芯盘41与双轴旋转平台10之间的预留间隙便于气泵70向暗仓20内腔注入气体并推动光敏传感器组件40爬升。
26.更进一步,如图2所示,日向自动化跟踪测定装置还包括设置于透光防尘罩50内侧的隔光罩60,隔光罩60包括竖向设置于第一光敏传感器30和暗仓20之间的筒状罩体61,及设置于暗仓20顶部的弧形罩体62,且筒状罩体61与弧形罩体62连接为一体,弧形罩体62顶部设有与暗仓20位置相对应的进光孔62a,隔光罩60的设置使得日光仅能通过进光孔62a进入暗仓20,从而保证光敏传感器组件40的测定精度。
27.结合3至图7说明本发明的日向自动化跟踪测定方法,具体步骤如下:
28.s1:如图3所示,安装日向自动化跟踪测定装置并进行初始化设定,以双轴旋转平台10的移动平台处于水平状态作为初始化条件,一对第一光敏传感器30和一对第二光敏传感器42的连线与x轴重合,另一对第一光敏传感器30和第二光敏传感器42的连线与y轴重合;
29.s2:如图4所示,根据沿x轴相对设置的两个第一光敏传感器30所接收到的光强差异判断双轴旋转平台10是否绕y轴转动,直至沿x轴相对设置的两个第一光敏传感器30的光强差异低于δe,同理,根据沿y轴相对设置的两个第一光敏传感器30所接收到的光强差异判断双轴旋转平台10是否绕x轴转动,直至沿y轴相对设置的两个第一光敏传感器30的光强差异低于δe,使得该自动化跟踪测定装置的指向接近日向,完成日向自动化跟踪测定装置姿态的第一级调整;
30.s3:如图5所示,通过动力装置提升设置于暗仓20底部的光敏传感器组件40,直至光敏传感器组件40接收到日光,锁定光敏传感器组件40的爬升高度,如图6所示,根据光敏
传感器组件40沿x轴相对设置的两个第二光敏传感器42所接收到的光强差异判断双轴旋转平台10是否绕y轴转动,直至沿x轴相对设置的两个第一光敏传感器30的光强差异低于δe,同理,根据光敏传感器组件40沿y轴相对设置的两个第二光敏传感器42所接收到的光强差异判断双轴旋转平台10是否绕x轴转动,直至沿y轴相对设置的两个第二光敏传感器42的光强差异低于δe,使得日向自动化跟踪测定装置的指向精确锁定日向,完成日向自动化跟踪测定装置姿态的第二级调整,将调整角度存储于控制模组80,依据调整角度通过坐标旋转公式计算出此时的日向角度。
31.本发明的日向自动化跟踪测定方法,先根据沿x轴或y轴相对设置的一对第一光敏传感器30所接收到的光强差异控制双轴旋转平台10绕y轴或x轴转动,直至沿正交方向设置的两对第一光敏传感器30的光强差异低于设定标准,使得该自动化跟踪测定装置的指向接近日向;初步定位后,再利用动力装置提升设置于暗仓20底部的光敏传感器组件40,直至光敏传感器组件40接收到日光即锁定其爬升高度,根据光敏传感器组件40沿x轴或y轴相对设置且紧密贴合排列的两对第二光敏传感器42所接收到的光强差异控制双轴旋转平台10绕y轴或x轴转动,直至沿正交方向设置的两对第二光敏传感器42的光强差异低于设定标准,该使用方法先利用正交设置于双轴旋转平台10边缘的两对第一光敏传感器30进行一级日向追踪,再利用正交设置于暗仓20内的两对第二光敏传感器42进行二级方向校准,经检测其测定误差能够控制在1
°
以下,从而大幅提高了日向测定的精度,实现了太阳能的高效利用,而且,相对基于天文学原理的主动计算测定方法而言,该使用方法运算简单,降低了成本,适用性更强。
32.所述步骤s1中,双轴旋转平台10顶部还安装有透光防尘罩50,透光防尘罩50呈半球形的透明壳体,透光防尘罩50与双轴旋转平台10共同构成一密闭空间,暗仓20、光敏传感器组件40、动力装置及控制模组80均位于密闭空间内。
33.所述步骤s1中,透光防尘罩50内侧还安装有隔光罩60,隔光罩60包括竖向设置于第一光敏传感器30和暗仓20之间的筒状罩体61,及设置于暗仓20顶部的弧形罩体62,且筒状罩体61与弧形罩体62连接为一体,弧形罩体62顶部设有与暗仓20位置相对应的进光孔62a,隔光罩60的设置使得日光仅能通过进光孔62a进入暗仓20,从而保证光敏传感器组件40的测定精度。
34.所述步骤s3中,动力装置采用气泵70,暗仓20的侧壁分别设有进气口22和出气口21,进气口22设置于光敏传感器组件40下方,出气口21设置于光敏传感器组件40上方,气泵70通过管道分别与进气口22和出气口21连通,且管道上设有单向阀门,在日向自动化跟踪测定装置完成初步定位后,控制模组80通过控制气泵70向暗仓20内腔注入气体,进而推动光敏传感器组件40沿暗仓20轴线向上爬升,直至光敏传感器组件40接收到日光,控制模组80控制气泵70停止注入气体,锁定光敏传感器组件40的爬升高度,如图7所示,在辅助日向自动化跟踪测定装置精确对准日向之后,控制模组80控制气泵70抽出暗仓20内腔气体,光敏传感器组件40降至暗仓20底部。
35.所述步骤s3还包括,为进一步完成更为精确的日向追踪,利用动力装置分级回退光敏传感器组件40,如光敏传感器组件40中四个第二光敏传感器42出现明显接收光强差异,根据四个第二光敏传感器42接收的光强差异,结合双轴旋转平台10的驱动电机完成日向自动化跟踪测定装置姿态的分级调整,通过多级姿态调整,使得日向自动化跟踪测定装
置与实际日向的误差接近于零,并通过控制模组80中存储的各级调整过程中日向自动化跟踪测定装置在x轴和y轴两个方向上的历次调整角度,计算出此时的日向角度。
36.所述步骤s3中,光强差异δe取位于x轴或y轴上相对设置的两个第一光敏传感器30所测光强度值中较大值的5%~10%,光强差异δe取位于x轴或y轴上相对设置的两个第二光敏传感器42所测光强度值中较大值的5%~10%,为衡量光强差异提供判断依据,提高日向测定的精度,本实施例优选光强度值中较大值的10%。
37.上述描述仅是对本发明较佳实施例的描述,并非对本发明范围的任何限定,本发明领域的普通技术人员根据上述揭示内容做的任何变更、修饰,均属于权利要求范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
