1.本发明涉及电力系统状态监测领域,尤其是涉及一种高风电占比系统的暂态稳定性判断方法。
背景技术:
2.大规模利用风电、光伏等新能源,实现对传统化石能源的补充甚至替代,是解决能源危机、环境问题以及气候问题的重要手段。在各种新能源利用中,风力发电是当今技术最为成熟、最具规模化开发潜力和商业化应用价值的发电技术,已得到世界众多国家的开发利用。然而,随着电网中风电装机容量的日益扩大,接入电网的电压等级不断提高,风机对电力系统暂态稳定性的影响愈发突出。在风力发电技术中,双馈风机发展成熟,得到了广泛应用。与传统同步机不同,双馈风机采用电力电子装置实现与交流电网间的同步,并以最大功率点跟踪模式运行,对系统惯量支持作用几乎为零,其大规模替代传统同步机,将使得系统惯量大规模减小,严重威胁系统的稳定性,因此,深入了解双馈风机的动态特性及与电网交互的机理,从而确定大规模双馈风电接入对电力系统暂态稳定性的影响,对我国风力发电规模化高效利用具有重要的理论和现实意义。
3.目前,高风电占比电力系统暂态稳定有很多种评估方法,其中时域仿真是最经典的方法之一,其中电力系统动态模型由微分方程表示,但在每个场景下求解缓慢,另一种方法是与机器学习有关,它依赖于数据样本的积累,而不分析数据背后的因果关系,第三种流行的方法是基于瞬态能量函数的技术,其中动能和势能是用复杂的积分推导来计算的。但是现有文献只分析了风电集中式接入对暂态稳定的影响,既有正的影响,也有负的影响,却没有考虑多风电场的分布式接入。此外,已有的研究未将暂态稳定控制和低电压穿越模式考虑进多风电场暂态稳定评估中,一方面,由于双馈感应风力发电机具有参与暂态稳定控制的能力,因此应将其纳入当前的暂态稳定研究中。另一方面,电网导则通常要求风电场具有低电压穿越能力,因此,急需一种高风电占比系统的暂态稳定性判断方法,以评估高风电渗透率背景下,电力系统的暂态稳定性能。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种快速可靠、可行性高、考虑风电场低电压穿越策略、适用范围广的考虑多风电场接入的高风电占比系统的暂态稳定性判断方法。
5.本发明的目的可以通过以下技术方案来实现:
6.与现有技术相比,本发明具有以下优点:
7.一、快速可靠:与现有方法相比,本发明公开的方法能够快速可靠地计算出风火系统暂态稳定判定边界,得出可靠精准的暂态稳定信息。
8.二、可行性高:在传统电力系统中考虑了分布式风电场接入,并计及其暂态稳定控制和低电压穿越策略,调度人员可根据不同的惯量分布和潮流分布,得出系统的暂态稳定
信息,更为符合当下双高电力系统实际运行情况,可获得更具可行性的判断方法。
9.三、适用范围广:在计及风电场接入系统的同时考虑各风电场的接入位置,对于风电渗透率日渐增加的系统,该方法同样能够保持快速性与准确性,可进一步应用于考虑暂态稳定约束的电力系统优化调度问题中。
附图说明
10.图1为修改后的ieee-39节点系统图。
11.图2为故障后各同步机组功角摇摆曲线。
12.图3为风电并网后的暂态稳定性仿真结果。
13.图4为风电并网对暂态稳定性影响的仿真结果与理论分析对比,图(4a)为双风电场接入,图(4b)为三风电场接入,图(4c)为考虑低电压穿越的三风电场接入,图(4d)为不考虑暂态稳定控制的三风电场接入。
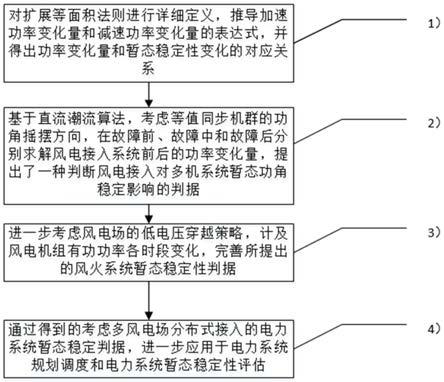
14.图5为本发明的方法流程图。
具体实施方式
15.下面结合附图和具体实施例对本发明进行详细说明。
16.本发明提出了一种高风电占比系统的暂态稳定性判断方法,该方法首先对扩展等面积法则等相关概念进行详细定义,推导加速功率变化量和减速功率变化量的表达式,从物理机理的角度,剖析加速功率和减速功率与电力系统暂态稳定的关系;同时,考虑等值同步机群的功角摇摆方向和风电机组的暂态稳定控制,利用直流潮流算法,在故障之前、故障期间和故障之后,分别求解风电接入系统前后的加减速功率变化量,随后提出判断风电接入对系统暂态稳定影响的判据。
17.电网导则通常要求风电场具有维持低电压状态下不脱网运行的能力,因此,有必要考虑风电场低电压穿越策略对本方法的影响,基于之前的研究方法,进一步推导考虑低电压穿越策略后的电力系统暂态稳定判据,在实际应用中,将两个得出的判据取交集即可。
18.最终,通过得到的考虑多风电场分布式接入的电力系统暂态稳定判据,进一步应用于电力系统规划调度和电力系统暂态稳定性评估。
19.如图5所示,本发明的高风电占比系统的暂态稳定性判断方法包括以下步骤:
20.1)对扩展等面积法则进行详细定义,推导加速功率变化量和减速功率变化量的表达式,并得出功率变化量和暂态稳定性变化的对应关系;
21.2)基于直流潮流算法,考虑等值同步机群的功角摇摆方向,在故障前、故障中和故障后分别求解风电接入系统前后的功率变化量,提出了一种判断风电接入对多机系统暂态功角稳定影响的判据;
22.3)进一步考虑风电场的低电压穿越策略,计及风电机组有功功率各时段变化,完善所提出的风火系统暂态稳定性判据;
23.4)利用digsilent powerfactory平台,搭建修改后的ieee-39节点系统,比对分布式风电并网对暂态稳定性影响的仿真结果与理论分析,结果表明,提出的判据具有较高的准确率。
24.在步骤1)中,扩展等面积法则可用于判断多机系统的暂态问题,从物理机理的角
度,剖析加速功率和减速功率与电力系统暂态稳定的关系,则扩展等面积法则定义为:
25.(1)暂态功角稳定:
26.电力系统受到扰动后,各机组保持同步运行的能力。
27.(2)等面积法则:
28.对于单机无穷大系统,当遭受扰动后,加速面积等于减速面积时,系统处于临界暂态稳定状态;加速面积大于减速面积时,系统处于暂态稳定状态;加速面积小于减速面积时,系统处于暂态不稳定状态。
29.(3)扩展等面积法则:
30.对于多机系统,当系统受到扰动时,利用同调等值法将多机系统归类为前向机群和后向机群,进而等值成单机无穷大系统,即可适用于等面积法则。
31.在步骤1)中,利用扩展等面积法则推导加减速功率变化量的表达式,进而得出功率变化量和暂态稳定变化的对应关系,具体表达式和对应关系分别为:
32.1、加减速功率变化量:
33.基于扩展等面积法则,加速面积和减速面积可表示为加速功率和减速功率关于时间的积分,因此,风电接入前后的加速面积变化量δa
acc
和减速面积变化量δa
dec
的数学表达式如下所示:
[0034][0035]
式中,和分别为风电接入后的加速功率和减速功率;p
acc
和p
dec
分别为风电接入前稳态情况下的加速功率和减速功率;δp
acc
和δp
dec
分别表示加速功率变化量和减速功率变化量;δa
acc
和δa
dec
分别表示加速面积变化量和减速面积变化量;tf为发生故障的时刻,tc为故障清除的时刻,tu表示风电接入前系统达到不稳定平衡点的时刻。
[0036]
若加速面积变化量大于零且减速面积变化量小于零,则表明风电接入后,电力系统的暂态稳定性下降了;若加速面积变化量小于零且减速面积变化量大于零,则表明风电接入后,电力系统的暂态稳定性提升了;若加速面积变化量和减速面积变化量同时大于或小于零,则表明风电接入后,电力系统暂态稳定性的变化难以确定。
[0037]
由于加速面积和减速面积可表示为加速功率和减速功率关于时间的积分,当各时间节点不变时,则能够通过加速功率变化量和减速功率变化量来判断电力系统暂态稳定性,可以避免复杂的积分运算,风电接入前后的加速功率变化量δp
acc
和减速功率变化量δp
dec
的数学表达式如下所示:
[0038][0039]
式中:pe和pm分别表示风电接入前系统的电磁功率和机械功率;p
ew
和p
mw
分别表示风电接入后系统的电磁功率和机械功率;上角标d和a分别表示故障期间和故障后的时段。
[0040]
2、暂态稳定判断标准:
[0041]
若加速功率变化量大于零且减速功率变化量小于零,则表明风电接入后,电力系
统的暂态稳定性下降了;若加速功率变化量小于零且减速功率变化量大于零,则表明风电接入后,电力系统的暂态稳定性提升了;若加速功率变化量和减速功率变化量同时大于或小于零,则表明风电接入后,电力系统暂态稳定性的变化难以确定。
[0042]
在步骤2)中,考虑等值同步机群的功角摇摆方向和风电机组的暂态稳定控制,利用直流潮流算法,在故障之前、故障期间和故障之后,分别求解风电接入系统前后的加减速功率变化量,最后提出判断风电接入对系统暂态稳定影响的判据,具体介绍如下:
[0043]
21)风电接入前的加减速功率
[0044]
将多机系统等值成双机系统,两个机群分别为s机群和a机群,然后,进一步等值成单机无穷大系统,其运动方程如下:
[0045][0046][0047]
式中:δ和h分别为系统功角和惯量;下角标s和a分别对应s机群和a机群的相关参数;p
l
为系统负荷的有功功率。
[0048]
基于直流潮流算法,根据风电接入前等值双机系统的阻抗图,稳态情况下,两机群之间的功角差要满足以下表达式:
[0049]
δ=p
gs
x-p
l
(x-x
l
)
[0050]
式中:p
gs
为稳态情况下机群s的电磁功率出力;x表示机群s到机群a的电抗值,x
l
表示机群s到负荷的电抗值。
[0051]
为简化计算,定义系统惯量分布系数α=hs/(hs ha),再结合上述公式,可得到稳态下的单机无穷大系统等值功率:
[0052]
pm=pe=p
gs-αp
l
[0053]
假设系统发生三相短路故障,此时同步机群的电磁功率为零,相应的加速功率可表示为:
[0054]
p
m-p
ed
=pm=pe=p
gs-αp
l
[0055]
故障切除后,系统阻抗发生变化且同步机群的机械功率保持不变,此时,等值机群s的出力和系统电磁功率分别为:
[0056][0057][0058]
式中:xc为故障后机群s到机群a的电抗值,为故障后机群s到负荷的电抗值。
[0059]
故障切除后,同步机群的机械功率保持不变,相应的减速功率可表示为:
[0060][0061]
22)风电接入后的加减速功率
[0062]
风电场接入后,为维持功率平衡式,同步机群需相应减少出力,系统潮流分布系数β表示双馈风机接入系统后同步机群s出力变化量占风机总出力的比例,于是有:
[0063][0064]
式中:p
w0
为风电总预测功率。
[0065]
电力系统中会接入多个风电场,已经不局限于单风电场集中接入,考虑风电机组的暂态稳定控制,其出力可表示为:
[0066]
p
wi
=p
wi0
δp
wi
[0067]
式中:p
wi
、p
wi0
和δp
wi
分别表示第i个风电场的实际出力、预测出力和暂态稳定控制调控出力量。
[0068]
同理,计算风电接入后的系统加速功率和减速功率,其数学表达式如下:
[0069][0070]
式中:ki是第i个风电场的接入位置系数,其具体数值为机群s和第i个风电场之间的电抗值与机群s和机群a之间的电抗值之比。
[0071]
23)同步机群功角摇摆特性
[0072]
风电场接入可能导致系统功角摇摆方向发生转变,那么将难以辨别风电接入对系统暂态稳定性的影响,所以需要先判断功角的摇摆方向,定义当δ
s-δa》0时,功角为正向摇摆;反之,功角反向摇摆。
[0073]
由于故障期间同步机出力为零,所以转子方程为解得δ
s-δa=pmt2/(4h),当pm》0时,风机接入前功角正向摇摆,同理,当p
mw
》0时,风机接入后功角正向摇摆,功角摇摆的边界条件如下所示:
[0074][0075]
24)风火系统暂态稳定判据
[0076]
首先以风机接入前后系统功角均正向摇摆为例,推导多风电场接入对系统暂态稳定性的影响,根据暂态稳定判断标准和风电接入前后的加减速功率,能够得出加速功率变化量和减速功率变化量,其数学表达式如下:
[0077][0078]
当系统发生三相短路时,系统频率随之上升,在暂态稳定控制的作用下,双馈机组会减小其出力,即δp
wi
《0。当δp
acc
《0且δp
dec
》0时,风电场接入系统能对暂态稳定性产生正面影响,其判别式如下所示:
[0079][0080]
式中:k
min
和k
max
分别表示风电场接入位置系数的最小值和最大值,n为风电场的数量。
[0081]
因此,风电场接入位置会直接影响系统暂态稳定性,但只与离s机群或a机群电气距离最近的风电场有关,与中间位置接入的风电场无关。
[0082]
同理,综合考虑所有功角摇摆的情况,可推导出风电场接入系统对暂态稳定性产生正面影响的判据条件,其数学表达式如下:
[0083][0084]
在步骤3)中,考虑风电场的低电压穿越策略的暂态稳定判据具体为:
[0085]
电网导则要求:风力发电场具备在并网点低电压状态下不脱网运行的能力,一般来说,风电场会参与上述暂态稳定控制,但如果风电并网点出现较深的电压跌落现象,就必须考虑低电压穿越策略,同时相应的风电场进入低电压穿越状态,其他风电并网点电压跌落较浅的风电场依旧受暂态稳定控制影响,不进入低电压穿越状态。
[0086]
假设第i个风电场进入低电压穿越模式,其各阶段出力如下所示:
[0087][0088]
式中:k
ri
为第i个风电场的有功功率恢复速度。
[0089]
假设n个风电场中有m个风电场进入低电压穿越模式,响应的加速功率变化量和减速功率变化量可分别表示为:
[0090]
δp
acc
=p
w0
(α-β)
[0091][0092]
考虑风电场的低电压穿越策略后,推导风电场接入系统对暂态稳定性产生正面影响的判据条件,其数学表达式如下:
[0093][0094]
对比不考虑低电压穿越策略的暂态稳定判据,max{k1,k2,
…
,kn}转变成max{k1,
k2,
…
,k
n-m
},在实际应用中,将两个得出的判据取交集即可。
[0095]
实施例
[0096]
在digsilent powerfactory中搭建修改后的ieee-39节点系统,如图1所示。风电场由双馈风机组成,总装机容量为900mw,单台风力发电机额定功率为6mw,风力发电机的其他数据如表1所示。
[0097]
表1风力发电机运行参数
[0098]
参数数值额定功率6mw额定电压0.69kv定子电阻0.01pu定子电抗0.1pu转子电阻0.01pu转子电抗0.1pu暂态稳定控制中有功功率减少的频率阈值50.20hz暂态稳定控制中有功功率减少停止的频率阈值50.05hz暂态稳定控制中有功功率减少的梯度40%/hz低电压穿越策略中插入crowbar电路的转子电流阈值2pu低电压穿越策略中插入crowbar电路的时间0.06s低电压穿越策略中重新连接所需的最小电网电压0.9pu低电压穿越策略中重新同步后有功功率增加梯度50%pu/s
[0099]
假设在母线8发生三相短路故障,各同步发电机组的功角变化如图2所示,不同发电机功角摇摆曲线会出现相似的变化趋势,该多机系统呈现出双机群摇摆模式,将g4-g7等效为s机群,其余同步机组等效为a机群。
[0100]
为验证本发明判据的正确性,通过改变每个同步机组的出力和惯量来获得各个场景的α和β,再根据稳定性判据与仿真计算结果,来判断风电接入产生的影响。仿真方法采用故障临界切除时间(critical clear time,cct)来衡量稳定性,若风电接入后系统的切除时间大于接入前的切除时间,则说明稳定性提升;反之,稳定性下降。进而,得出风电并网后的暂态稳定性仿真结果,如图3所示。浅色棱柱表明暂态稳定性增加,深色棱柱表明瞬态稳定性降低,风电接入前,故障切除时间为0.718s,用平面表示,研究表明,风电场对暂态稳定性的影响是复杂的,可能有积极的影响,也可能有消极的影响。
[0101]
通过理论分析与仿真结果的比较,验证该判据的有效性。在图4中,仿真结果用圆圈代替,浅色圆圈表示对暂态稳定性的影响是正面的,深色圆圈表示对暂态稳定性的是负面的;理论分析结果用外圆环代替,灰色外圆环表示所提出的判据显示为正面影响,黑色外圆环表示为负面影响,无外圆环表示为不确定影响。在图(4a)中,在正面和负面影响区域,两种方法的判断结果一致性为99.02%。因此,验证了该判断方法的正确性。在不确定区域,可能会出现正面影响和负面影响两种情况,但负面影响的部分占64.48%,所以不建议系统在这些区域运行。
[0102]
在图(4a)中,两个额定功率都为450mw的风电场分别连接在母线9和母线15上,相应的风电接入位置系数为k1=74.51%,k2=58.74%。在图(4b)中,三个额定功率都为300mw
的风电场分别连接在母线9,母线15和母线18上,总出力与双风电场相同,相应的风电接入位置系数为k1=74.51%,k2=58.74%,k3=65.45%。可以观察到,图(4a)和图(4b)的图像是一致的。因为与现有的双风电场相比,第三个风电场不是距离同步机群电气距离最近的。也就是说,在总风电出力量不变的情况下,连接在中间位置的风电场不影响暂态稳定。由此可见,风电场的电气位置在离风电机群最接近时,才对电力系统暂态稳定产生影响。
[0103]
当发生三相短路后,母线9所连接的风电场进入低电压穿越模式,如图(4c)所示。与图(4b)的图像相比,左上角的正面影响区域向右扩大。由于惯量分布系数α变大,相应的确定性区域变得比(4b)图更大。在实际运行过程中,不论哪个风电场进入低电压穿越模式,取(4a)图和(4b)图正面影响判据的交集即可满足系统暂态稳定运行的要求。
[0104]
图(4b)和图(4d)对比了双馈风机暂态稳定控制对暂态稳定性的影响,(4d)图部分正面影响区域被转移成(4b)中的不确定区域。是因为考虑双馈风机的暂态稳定控制后,增加了减速功率的考虑因素,导致稳定性判断的不确定性增加。
[0105]
在表2中对比了本研究方法和其他方法的优劣。虽然通过digsilent平台仿真的精度最高,但它不易应用于优化调度或系统规划中。也可以发现,机器学习需要大量的学习样本和长时间的训练时间。因此,本研究方法不仅精度高,而且可以直接作为优化或规划模型中的约束条件,保证风电接入系统后能对暂态稳定性产生正面的影响。
[0106]
表2比较不同判断暂态稳定方法的准确度和时间
[0107]
方法准确度时间本研究方法99.2%/digsilent平台仿真100%大约400秒机器学习98.66%182秒的训练时间和3.3秒的计算时间
[0108]
综上,本方法首先对暂态稳定,等面积法则和扩展等面积法则进行详细定义,并利用直流潮流算法求解风电接入前后的加速功率变化量和减速功率变化量,进而快速可靠地计算出风火系统暂态稳定判定边界,得出可靠精准的暂态稳定信息,保证了求解的精度,提高了求解的速度。此外,在传统电力系统中考虑了分布式风电场接入,并计及其暂态稳定控制和低电压穿越策略,调度人员可根据不同的惯量分布和潮流分布,得出系统的暂态稳定信息,更为符合当下双高电力系统实际运行情况,可获得更具可行性的判断方法。最后,在计及风电场接入系统的同时考虑各风电场的接入位置,对于风电渗透率日渐增加的系统,该方法同样能够保持快速性与准确性,可进一步应用于考虑暂态稳定约束的电力系统优化调度问题中,适用范围广。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
