技术特征:
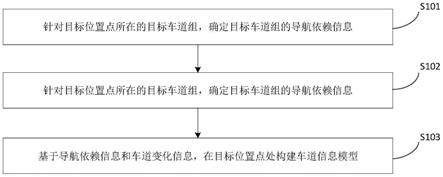
1.一种车道数据处理方法,包括:遍历车道级地图中的车道组,确定车道信息发生变化的目标位置点;针对所述目标位置点所在的目标车道组,确定所述目标车道组的导航依赖信息;基于所述导航依赖信息和车道变化信息,在所述目标位置点处构建车道信息模型。2.根据权利要求1所述的方法,其中,所述导航依赖信息包括道路趋势;针对所述目标位置点所在的目标车道组,确定所述目标车道组的导航依赖信息,包括:确定所述目标车道组的边界线的端点位置和边界朝向;根据所述端点位置和边界朝向,确定所述目标车道组的道路趋势。3.根据权利要求2所述的方法,其中,确定所述目标车道组的边界线的边界朝向,包括:针对所述边界线的任一端点位置,从候选形状点中确定距离该端点位置最近的目标形状点;其中,候选形状点是构成所述边界线形状的位置点;基于所述端点位置和目标形状点的位置,确定所述边界线的边界朝向。4.根据权利要求1所述的方法,其中,若所述目标车道组为分歧或合流场景中的车道组,则所述导航依赖信息还包括所述目标车道组关联的路链中的分歧点位置或合流点位置,与所述目标位置点之间的偏移参数。5.根据权利要求4所述的方法,其中,针对所述目标位置点所在的目标车道组,确定所述目标车道组的导航依赖信息,包括:从所述目标位置点向所述目标车道组关联的路链做投影,得到投影位置;将所述投影位置与所述路链中的分歧点位置或合流点位置的距离,作为所述偏移参数。6.根据权利要求1所述的方法,其中,所述导航依赖信息还包括目标车道组的边界线的标线类型和路侧属性。7.根据权利要求1所述的方法,其中,遍历车道级地图中的车道组,确定车道信息发生变化的目标位置点,包括:根据遍历到的当前车道组,获取当前车道组的车道信息和/或所述当前车道组的后继车道组的车道信息;根据所述当前车道组和/或后继车道组的车道信息,确定存在车道变化信息;确定所述当前车道组的边界线的连线与所述当前车道组关联的路链之间的交点,并将所述交点作为所述目标位置点。8.根据权利要求7所述的方法,其中,所述车道变化信息包括车道数变化信息、车道类型变化信息、车道标线变化信息、车道中断变化信息、车道开始变化信息和车道结束变化信息中的至少一个。9.一种车道数据处理装置,包括:遍历模块,用于遍历车道级地图中的车道组,确定车道信息发生变化的目标位置点;导航依赖信息计算模块,用于针对所述目标位置点所在的目标车道组,确定所述目标车道组的导航依赖信息;模型构建模块,用于基于所述导航依赖信息和车道变化信息,在所述目标位置点处构建车道信息模型。10.根据权利要求9所述的装置,其中,所述导航依赖信息包括道路趋势;
所述导航依赖信息计算模块包括:第一计算单元,用于确定所述目标车道组的边界线的端点位置和边界朝向;道路趋势确定单元,用于根据所述端点位置和边界朝向,确定所述目标车道组的道路趋势。11.根据权利要求10所述的装置,其中,所述第一计算单元包括:形状点确定子单元,用于针对所述边界线的任一端点位置,从候选形状点中确定距离该端点位置最近的目标形状点;其中,候选形状点是构成所述边界线形状的位置点;朝向计算子单元,用于基于所述端点位置和目标形状点的位置,确定所述边界线的边界朝向。12.根据权利要求9所述的装置,其中,若所述目标车道组为分歧或合流场景中的车道组,则所述导航依赖信息还包括所述目标车道组关联的路链中的分歧点位置或合流点位置,与所述目标位置点之间的偏移参数。13.根据权利要求12所述的装置,其中,所述导航依赖信息计算模块包括:投影单元,用于从所述目标位置点向所述目标车道组关联的路链做投影,得到投影位置;偏移计算单元,用于将所述投影位置与所述路链中的分歧点位置或合流点位置的距离,作为所述偏移参数。14.根据权利要求9所述的装置,其中,所述导航依赖信息还包括目标车道组的边界线的标线类型和路侧属性。15.根据权利要求9所述的装置,其中,所述遍历模块包括:车道信息获取单元,用于根据遍历到的当前车道组,获取当前车道组的车道信息和/或所述当前车道组的后继车道组的车道信息;车道变化信息确定单元,用于根据所述当前车道组和/或后继车道组的车道信息,确定存在车道变化信息;目标位置点确定单元,用于确定所述当前车道组的边界线的连线与所述当前车道组关联的路链之间的交点,并将所述交点作为所述目标位置点。16.根据权利要求15所述的装置,其中,所述车道变化信息包括车道数变化信息、车道类型变化信息、车道标线变化信息、车道中断变化信息、车道开始变化信息和车道结束变化信息中的至少一个。17.一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-8中任一项所述的方法。18.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-8中任一项所述的方法。19.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-8中任一项所述的方法。
技术总结
本公开提供了一种车道数据处理方法、装置、电子设备和存储介质,涉及人工智能领域,尤其涉及自动驾驶领域。具体实现方案包括:遍历车道级地图中的车道组,确定车道信息发生变化的目标位置点;针对所述目标位置点所在的目标车道组,确定所述目标车道组的导航依赖信息;基于所述导航依赖信息和车道变化信息,在所述目标位置点处构建车道信息模型。本公开方案可提升获取车道变化信息要素的效率和准确性。提升获取车道变化信息要素的效率和准确性。提升获取车道变化信息要素的效率和准确性。
技术研发人员:董佳臣 莫高鹏 刘玲玲 王新日
受保护的技术使用者:北京百度网讯科技有限公司
技术研发日:2021.12.10
技术公布日:2022/3/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。