1.本发明属于人体运动检测及人机交互技术领域,更具体地,涉及一种两栖柔性三维力位测量装置、制备方法及其应用。
背景技术:
2.随着智慧医疗、智能机器人的迅猛发展,人体运动信息在病理诊断、机器人控制等方面的作用日益突出。基于多维力、形变感知的人机交互装置在运动状态测量、健康监测、医疗诊断、机器人控制等方面有广泛应用前景。
3.目前,传统的足底力测量的装置均为一维压力的测量,例如,利用感应装置在竖直方向平移或变形,造成磁通量的改变后,实现对于竖直压力的测量。但一维力的测量存在明显不足,例如,在进行人体日常动作模式识别时,高转弯等动作的识别正确率低,参见下表,其示出了通过一维力测量的识别率。再例如,在进行动态平衡测量时,需要三维作用力计算外推质心,进而评估平衡。但目前仍缺乏有效的三维力感应装置。
4.
技术实现要素:
5.针对现有技术的以上缺陷或改进需求,本发明提供了一种两栖柔性三维力位测量装置、制备方法及其应用,其目的在于通过获取三维磁场变化量,实现三维力或位移的检测,由此解决传统柔性传感器环境适应性差、传感维度低等的技术问题。
6.按照本发明的一个方面,提供了一种两栖柔性三维力位测量装置,所述装置包括:自下而上依次设置的柔性基底层、弹性层、柔性磁膜;其中,所述柔性基底层中设置磁测量模块和控制模块;所述弹性层在受力时发生三维形变,牵引柔性磁膜在三维方向上产生磁场变化,所述磁测量模块用于获取三维磁场变化量,所述控制模块用于将所述三维磁场变化量转换为三维力或位移进行输出。
7.优选地,所述柔性磁膜包括柔性聚合物薄膜和均匀分布在该柔性聚合物薄膜中具
有磁性的固体粉末,所述柔性磁膜的磁场强度为4mt-20mt;优选地,所述柔性聚合物薄膜为聚二甲基硅氧烷薄膜,所述具有磁性的固体粉末为钕铁硼磁粉、钴-氧化铁磁粉或二氧化铬磁粉。优选地,所述磁测量模块为三维霍尔元件或磁阻传感器,所述控制模块为单片机。
8.优选地,所述弹性层为具有空腔结构的弹性层、实心结构的弹性层或具有多孔结构的弹性层;优选地,所述弹性层为具有多孔结构聚二甲基硅氧烷。
9.按照本发明的另一个方面,提供了一种两栖柔性三维力位测量装置的制备方法,所述方法包括下列步骤:
10.(1)将聚二甲基硅氧烷和具有磁性的固体粉末混合,利用刮涂仪制成薄膜,固化后使用充磁设备对该薄膜进行充磁,得到磁场强度为4mt-20mt的柔性磁膜;
11.(2)将水溶性固体颗粒放置于模具中,向模具中浇筑聚二甲基硅氧烷,待其固化后放入水中使其内部水溶性固体颗粒溶解,形成弹性层;该弹性层为具有多孔结构的弹性层;
12.(3)将聚二甲基硅氧烷固化得到柔性基底层,在柔性基底层中固定磁测量模块和控制模块;
13.(4)将柔性磁膜、弹性层和固定有磁测量模块和输出电的柔性基底层依次粘合在一起,得到所述两栖柔性三维力位测量装置。
14.优选地,所述具有磁性的固体粉末为钕铁硼磁粉、钴-氧化铁磁粉或二氧化铬磁。
15.优选地,所述水溶性固体颗粒为水溶性盐或蔗糖。
16.按照本发明的再一个方面,提供了一种两栖柔性三维力位测量装置的应用,将多个所述测量装置设置在鞋垫上不同位置,通过足底三维力监测实现人体运动状态检测。
17.按照本发明的再一个方面,提供了一种两栖柔性三维力位测量装置的应用。将所述测量装置作为力-位主动控制装置,用于获取三维运动信息实现人机实时交互。
18.总体而言,通过本发明所构思的以上技术方案与现有技术相比,至少能够取得下列有益效果。
19.(1)本发明提供的两栖柔性三维力位测量装置受到外部作用力后,弹性层在外载作用下发生三维变形,牵引柔性磁膜导致周围的磁场变化,磁测量模块可以获取柔性磁膜在三维方向上的3个磁场变化,通过控制模块将三维磁场变化量转换为三维力或位移进行输出,即可完成测量。具体地:柔性磁膜产生的常磁场在三维空间中分布不均匀,通过三维磁场强度可以确定相对于磁膜的空间位置。本发明中,将柔性磁膜附着在弹性体(弹性层)表面上,弹性体的三维变形牵引柔性磁膜发生位移;在弹性体底部的磁测量模块(例如霍尔元件)监测三维磁场的变化,该磁场变化是弹性体和柔性磁体三维变形的共同结果,可以反演柔性磁膜的空间位置变化,或柔性磁膜位置的弹性体形变位移。通过弹性体的有限元分析可以确立弹性体受力和外载的理论模型,由弹性体的三维形变进一步得到三维力信息。由此,本发明中磁测量模块的测量信号反映磁弹性体的三维变形,三维磁场的变化可以反演弹性体的三维形变,通过标定可进一步确定测量装置上的三维载荷。由此,本发明增加了测量维度,有效解决拐弯等运动模式识别难题。
20.(2)本发明中采用了柔性磁膜,该柔性磁膜质量轻,其基底材料可以与弹性层的材料相同,二者具有很好的兼容性,可以随着弹性层的形变而形变,即使弹性层的三维形变很微小,柔性磁膜也同样地能够随之被牵引而产生微小的三维形变。并且,本发明的柔性磁体可顺应足底的非线性变形。相较于传统的固体磁铁而言,固体磁铁无法有效地产生三维形
变,并且其与粘贴的弹性体之间由于是完全不同的材料,二者容易出现粘贴处的空腔、粘贴不牢固等问题。并且,刚性的固体磁铁在制作为鞋垫等时会影响人体的自然步态,无法保证测量准确性。
21.(3)本发明中,测量范围和精度可以根据材料配比、构型(实心、空腔、多孔等)、尺寸(长宽高)等进行适应性改变。
22.(4)本专利的磁测量模块(例如霍尔元件)可以直接焊接在柔性电路板或分片式电路板上,柔性基底能够保证测量结果的准确性。
23.(5)由于传统的基于电容、电阻、压电测量等原理的测量信号容易受到环境温度、湿度等因素干扰,在水中,测量装置的介电常数变化易导致测量结果出现偏差。而本发明中磁测量模块和控制模块设置在柔性基底层中,磁场分布不受水下环境影响,且在水下环境中柔性磁膜和多孔弹性体的形变仍导致周围磁场的变化,可以满足两栖水陆环境应用的需求。由于空气、水的相对磁导率约为1,本发明提供的两栖柔性三维力测量装置在水陆环境切换使用时,无需二次标定。
24.(6)本发明提供的装置采用柔性材料制作,具有小巧、柔软等特性,可顺应人体肌骨系统运动而变形,具有较好的可穿戴性,有利于在可穿戴装备、智能感知、康复医疗等领域推广应用。
25.(7)将本发明应用在足底力测量场景中时,采用将多个测量装置设置在鞋垫上不同位置的方式,可以利用多个通道的数据组合特征得到人体运动模式。每个传感单元(测量装置)提供xyz三维力数据,然后使用神经网络算法对运动模式分类训练,用训练的模型在人体运动时实时预测人体运动模式,针对人体日常动作进行识别,识别率平均可达98.8%。
附图说明
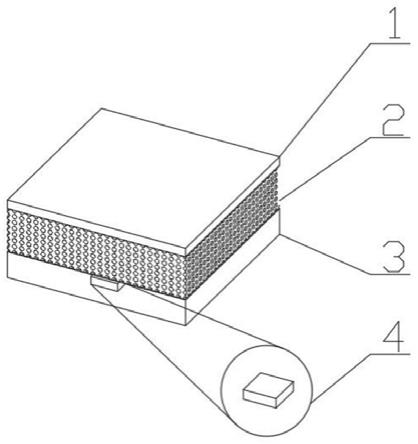
26.图1是本发明提供的两栖柔性三维力位测量装置的结构示意图;
27.图2是本发明提供的两栖柔性三维力位测量装置与控制模块及终端设备的连接示意图;
28.图3中(a)-(f)是本发明提供的两栖柔性三维力位测量装置用作足底压力监测时,足底压力分别通过6个测量装置采集数据图;图3中(g)为该6个测量装置在足底的分布位置图;
29.图4中(a)-(b)是本发明提供的两栖柔性三维力位测量装置用作足底压力监测时的人体运动模式的两个识别率图。
30.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:
31.1-柔性磁膜,2-弹性层,3-柔性基底层,4-磁测量模块。
具体实施方式
32.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
33.本发明一个实施例提供一种两栖柔性三维力位测量装置,参见图1,所述装置包
括:自下而上依次设置的柔性基底层3、弹性层2、柔性磁膜1;其中,所述柔性基底层3中设置磁测量模块4和与该磁测量模块4连接的控制模块;所述弹性层2在受力时发生三维形变,牵引柔性磁膜1在三维方向上产生磁场变化,所述磁测量模块4用于获取三维磁场变化量,所述控制模块用于将所述三维磁场变化量转换为三维力或位移进行输出。
34.需要说明的是,本发明实施例不对该两栖柔性三维力位测量装置的具体形状进行限制,其可以根据实际应用场景调整其形状。例如,其可以为图1中示出的长方体,也可以为图3中(g)示出的圆柱体,本领域技术人员可以理解的是,图1和图3中(g)仅是本发明实施例的两个示例,不应理解为对本发明的限制。
35.其中,所述柔性磁膜1包括柔性聚合物薄膜和均匀分布在该柔性聚合物薄膜中具有磁性的固体粉末,所述柔性磁膜1的磁场强度为4mt-20mt;优选地,所述柔性聚合物薄膜为聚二甲基硅氧烷薄膜,所述具有磁性的固体粉末为钕铁硼磁粉、钴-氧化铁磁粉、二氧化铬磁粉等硬磁材料。
36.所述磁测量模块4为三维霍尔元件或磁阻传感器,所述控制模块为单片机。本领域技术人员可以理解的是,本发明中弹性层的具体结构可以根据实际情况进行改变,弹性层2为具有空腔结构的弹性层、实心结构的弹性层或具有多孔结构的弹性层;优选地,所述弹性层2为具有多孔结构的聚二甲基硅氧烷。其中,空腔型的弹性层可以有效降低刚性芯片和柔性弹性体之间的应力集中。可以根据实际应用环境进行适应性选择。另外,本实施例中聚二甲基硅氧烷为购自道康宁公司,型号为sylgard 184的pdms。
37.图2所示为人机交互装置与控制模块及终端设备的连接示意图,人机交互装置中的柔性电路板4与控制模块相连,控制模块通过数据线与终端设备相连。
38.本实施例提供的测量装置的工作原理如下:当柔性磁膜1不受压力时,柔性磁膜1中的钕铁硼磁粉在磁测量模块处产生一定的磁场分布;当柔性磁膜1承受压力时,柔性磁膜1发生形变,钕铁硼磁粉发生位移,在磁测量元件处产生新的磁场分布。磁测量模块感知磁场分布的磁信号,将其转变为电信号进行输出,输出信号随着柔性磁膜所受压力而变化。控制模块接收电信号,并将电信号输送至终端设备,控制模块可采用单片机,终端设备可为计算机、智能手机等。
39.需要说明的是,上述控制模块用于将所述三维磁场变化量转换为三维力进行输出的具体过程如下:
40.(1)由毕奥—萨伐尔定律和磁场叠加原理计算圆柱体外任一点p(x,y,z)的磁感应强度为:
[0041][0042]
其中,表示源点(x0,y0,z0)失径;表示场点p(x,y,z)失径;μ0表示真空磁导率;表示积分路径,l表示源电流。
[0043]
对其进行体积分可得圆柱永磁体空间磁感应强度为:
[0044][0045]
由此建立磁感应强度(b
x
,by,bz)与位移(x,y,z)间的关系,其中,r0表示圆柱磁体半径,(r,θ,h)表示柱坐标系下一点的坐标变量,b
x
,by,bz表示p点xyz三方向磁感应强度。
[0046]
(2)建立超弹性材料的力学方程,建立力与位移间的关系,由此通过磁场变化反演三维力大小。
[0047][0048]
δz=eεz[0049][0050]
其中,εz表示z方向的应变分量,δz表示z方向的应力分量,uz表示z方向变形量,h表示弹性层高度,a表示弹性层上表面积,e表示弹性模量。
[0051][0052]
τ
x
=gγ
x
[0053][0054]
其中,γ
x
表示x方向的应变分量,τ
x
表示x方向的应力分量,u
x
表示x方向变形量,h表示弹性层高度,a表示弹性层上表面积,g表示切变模量。
[0055]
同理可求得
[0056]
其中τy表示y方向的应力分量,a表示弹性层上表面积,g表示切变模量,uy表示y方向变形量,h表示弹性层高度。
[0057]ux
、uy、uz可由永磁体空间磁感应强度方程求解。
[0058]
本发明另一实施例提供一种两栖柔性三维力位测量装置的制备方法,所述方法包括下列步骤:
[0059]
(1)将聚二甲基硅氧烷和具有磁性的固体粉末混合,利用刮涂仪制成薄膜,固化后使用充磁设备对该薄膜进行充磁,得到磁场强度为4mt-20mt的柔性磁膜;
[0060]
(2)将水溶性固体放置于模具中,向模具中浇筑聚二甲基硅氧烷,待其固化后放入
水中使其内部水溶性固体溶解,形成弹性层;
[0061]
(3)将聚二甲基硅氧烷固化得到柔性基底层,在柔性基底层中固定磁测量模块和控制模块;
[0062]
(4)将柔性磁膜、弹性层和固定有磁测量模块和输出电的柔性基底层依次粘合在一起,得到所述两栖柔性三维力测量装置。
[0063]
其中,柔性聚合物薄膜为聚二甲基硅氧烷薄膜,所述具有磁性的固体粉末为钕铁硼磁粉、钴-氧化铁磁粉、二氧化铬磁粉等硬磁材料。
[0064]
本发明提供的两栖柔性三维力位测量装置尤其适用于人机交互领域。
[0065]
本发明再一个实施例将所述测量装置作为力-位主动控制装置,用于实时获取三维运动信息。例如,将测量装置作为指尖鼠标。具体地,由于本发明可感知三维磁场变化,当手指控制磁膜移动时,手指施加的作用力引起柔性磁膜、多孔弹性体的非线性形变,在各个磁场测量点处产生新的磁场分布,从而产生电信号输出,通过监测不同的电信号,能识别手指对磁膜施加的三维力。若将电信号作为输入信号,可在终端设备中控制鼠标的移动,能够实现人机交互功能。
[0066]
本发明又一个实施例将多个所述测量装置设置在鞋垫上不同位置,通过足底三维力监测实现人体运动状态检测。具体地,参见图3中(g),将多个测量装置阵列排布在鞋垫上,当脚踩在鞋垫上时,在各个传感模块中三维作用力分布不同,不同的三维载荷分布引起柔性磁膜、弹性体的非线性形变,在各个磁场测量点处产生新的磁场分布,从而产生电信号输出,通过监测不同的电信号,能测出脚底不同区域的作用力分布。本发明可以实现动态监测在行走、跑步、上下坡、上下楼梯、蛙泳、自由泳、蝶泳等多种水陆两栖运动中,足底作用力在水平面、冠状面与矢状面方向的变化。
[0067]
本实施例中,仅采用6个测量装置即可实现对于足底三维力的分布式检测,进而实现人体运动状态检测。这是与传统的仅仅检测足底一维压力完全不同的,传统的仅检测足底一维压力时,需要在空间上排布更多的测量装置,以增加空间设置密度,提高检测精度。而本发明中通过研究发现,在使用本发明提供的测量装置时,仅采用6个测量装置足以使得平地行走、上/下坡、上/下楼梯、左/右转等7种步态的平均识别率达到98.9%,远远超过现有技术中也采用6个一维压力传感器测量得到的平均识别率83.4%。
[0068]
足底压力采集结果如图3中(a)-(f)所示,结论如下:
[0069]
(1)位于脚掌前端的6号传感器,其信号呈尖峰状,代表受力时长较短;(2)位于脚掌后端的传感器,其重力方向形变量最大,代表受力最大;(3)所有传感器,x方向信号变化明显,y方向信号变化不明显,代表走路时水平摩擦力方向沿着行走的前进方向。初步试验结果验证了该三维力传感方法在足底力测量方面的有效性。
[0070]
基于足底压力的人体运动模式识别结果如图4中(a)-(b)所示,针对直线行走、左右转弯、上下楼梯、上下坡等人体日常运动,该方法的平均识别率为98.9%,实验结果验证了该三维力位测量装置在动态监测人体运动方面的有效性。
[0071]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。